
主要内容 1、智能控制的产生和基本特亚 2、基于神经网络的系统辨识 3、基于神经网络的系统辨识示例 4基于神经网络的系统控制 5、基于神经网络的系统控制示列
主要内容 1、 智能控制的产生和基本特征 2、基于神经网络的系统辨识 3、基于神经网络的系统辨识示例 4、基于神经网络的系统控制 5、基于神经网络的系统控制示例
13.1智能控利的产生和基本特亚 寻找不需要缝立(精确)数学模型的控制方案,研究 能够按照操作人员的智力、经验及意识发布指令的控制器。 (含辨识器)。 凡是具备两个条件的智能学科都可以在智能控制上占 一席之地:⑦能够摸拟人脑的智力行为处理复杂性、不确 定性、非线性对象。 ②不需要对象的精确数学模型便能逼近满意控制。 智能控制阶段的研究对象是控制器,而传统控制理论 的研究对象是被控对象,两者都是闭环负友馈形式
13.1 智能控制的产生和基本特征 寻找不需要建立(精确)数学模型的控制方案,研究 能够按照操作人员的智力、经验及意识发布指令的控制器。 (含辨识器)。 凡是具备两个条件的智能学科都可以在智能控制上占 一席之地:①能够模拟人脑的智力行为处理复杂性、不确 定性、非线性对象。 ②不需要对象的精确数学模型便能逼近满意控制。 智能控制阶段的研究对象是控制器,而传统控制理论 的研究对象是被控对象,两者都是闭环负反馈形式
13.2基于神经网络的系统辨识 1)辨识系统的基本结构 系统辨积的主要任务就是这掉辨积模型,确定输入信号 和误差信号及其差值。 干扰 被测系统 辨识模型 2)辨识模型 静态模型、动态模型、参数模型、非参数模型(阶跃响 应、脉冲响应)、神经网辂模型 3)辨识系统中的误差准则 J(a=∑fek】 k=1 其中,f有各种送掉,最多的是平方离数f[(k)】=e(k) 其中,(k)是误差离数,定义区间为[O,M]
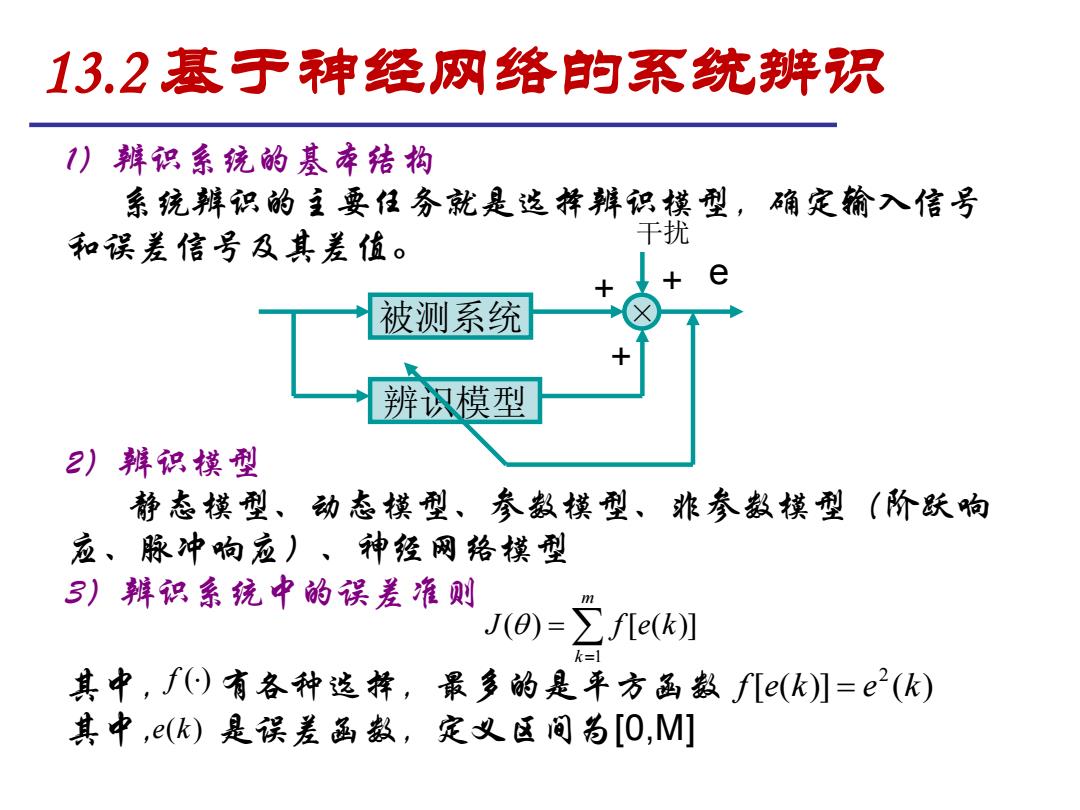
1)辨识系统的基本结构 系统辨识的主要任务就是选择辨识模型,确定输入信号 和误差信号及其差值。 2)辨识模型 静态模型、动态模型、参数模型、非参数模型(阶跃响 应、脉冲响应)、神经网络模型 3)辨识系统中的误差准则 其中, 有各种选择,最多的是平方函数 其中, 是误差函数,定义区间为[0,M] = = m k J f e k 1 ( ) [ ( )] f () [ ( )] ( ) 2 f e k = e k e(k) 被测系统 × + 干扰 + 辨识模型 + e 13.2 基于神经网络的系统辨识
13.2基于神经网络的系统辨识 4)神经网络辨积原理 由保差准则可和,系统辨积本质上是一个优化问题。 辨识的方法大体上分两种: ①基于算法的辨识方法 要求建立一个模型,孩模型依赖于某个参数日,把 辨识转化成为对模型参数的估计。估计方法有:最小二 乘法(快,线性),梯度下降法,极大似然法。 ②基于神经网络的辨识方法 在遇到不能孩性化的非孩性系统时,对应的模型难于 转化成关于参数空间的线型模型。基子算法的辨识方法 将束手无策
4)神经网络辨识原理 由误差准则可知,系统辨识本质上是一个优化问题。 辨识的方法大体上分两种: ①基于算法的辨识方法 要求建立一个模型,该模型依赖于某个参数 ,把 辨识转化成为对模型参数的估计。估计方法有:最小二 乘法(快,线性),梯度下降法,极大似然法。 ②基于神经网络的辨识方法 在遇到不能线性化的非线性系统时,对应的模型难于 转化成关于参数空间的线型模型。基于算法的辨识方法 将束手无策。 13.2 基于神经网络的系统辨识
13.2基于神经网络的系统辨识 基于神经网络的辨识系统结构图如下图所示。辨识不 在意神经网络以什么形式去逼近实际系统,只关心神经网 络的输出与被辨识条统的输出相差多少,(k)可否为零。 V(k) u(k) y(k) 被辨识系统 延时 辨识模型 (k)
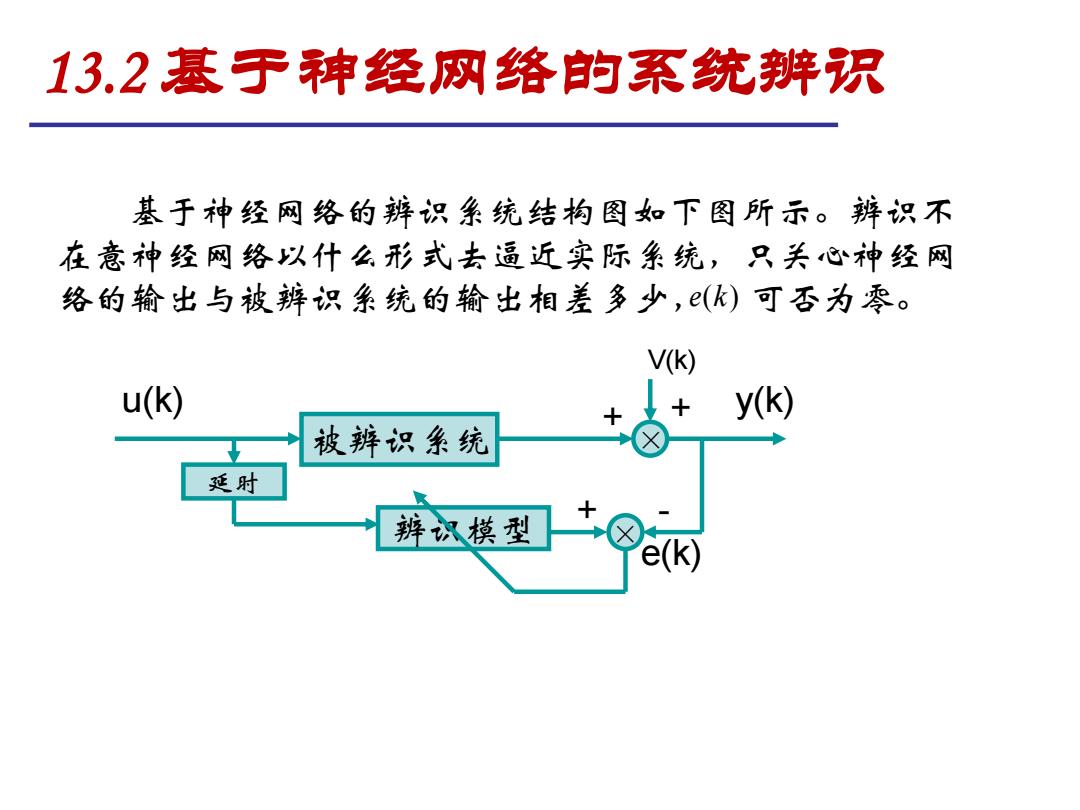
基于神经网络的辨识系统结构图如下图所示。辨识不 在意神经网络以什么形式去逼近实际系统,只关心神经网 络的输出与被辨识系统的输出相差多少, e(k) 可否为零。 被辨识系统 × + V(k) + 辨识模型 + y(k) × - 延时 u(k) e(k) 13.2 基于神经网络的系统辨识