主要内容 ·图像退化/复原过程的模型 •噪声模型 ·空间域滤波方法 •频率域滤波方法 •退化函数的估计 ·逆滤波 ·维纳滤波
主要内容 • 图像退化/复原过程的模型 • 噪声模型 • 空间域滤波方法 • 频率域滤波方法 • 退化函数的估计 • 逆滤波 • 维纳滤波
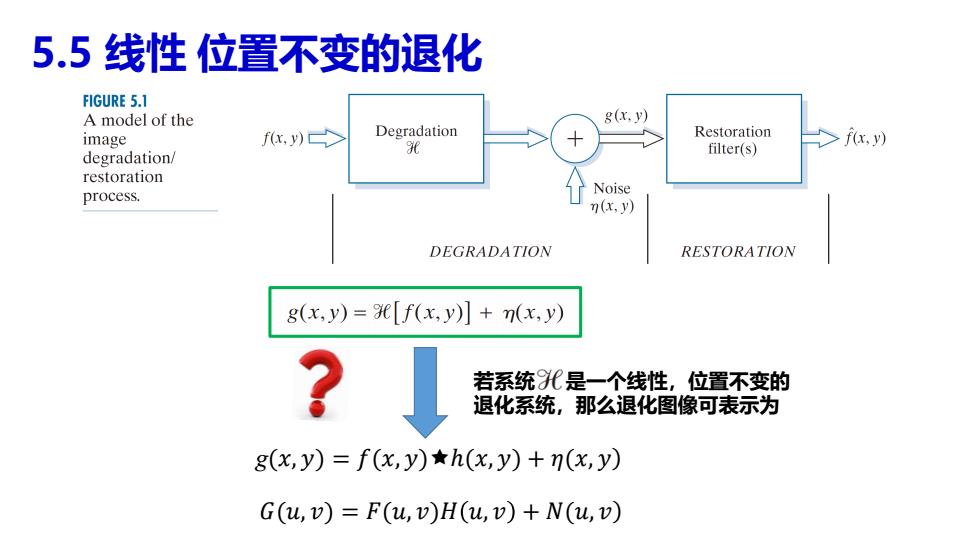
5.5线性位置不变的退化 FIGURE 5.1 A model of the g(x.y) image f(x.y) Degradation Restoration 9光 f(x.y) degradation/ filter(s) restoration process. Noise n(x.y) DEGRADATION RESTORATION g(x,y)=[f(x,y)】+(x,y) 若系统C是一个线性,位置不变的 退化系统,那么退化图像可表示为 g(x,y)=f(x,y)h(x,y)+n(x,y) G(u,)=F(u,)H(u,)+N(u,v)
5.5 线性 位置不变的退化 若系统 是一个线性,位置不变的 退化系统,那么退化图像可表示为 g(𝑥, 𝑦ሻ = 𝑓(𝑥, 𝑦ሻℎ(𝑥, 𝑦ሻ + 𝜂(𝑥, 𝑦ሻ 𝐺(𝑢, 𝑣ሻ = 𝐹(𝑢, 𝑣ሻ𝐻 𝑢, 𝑣 + 𝑁(𝑢, 𝑣ሻ
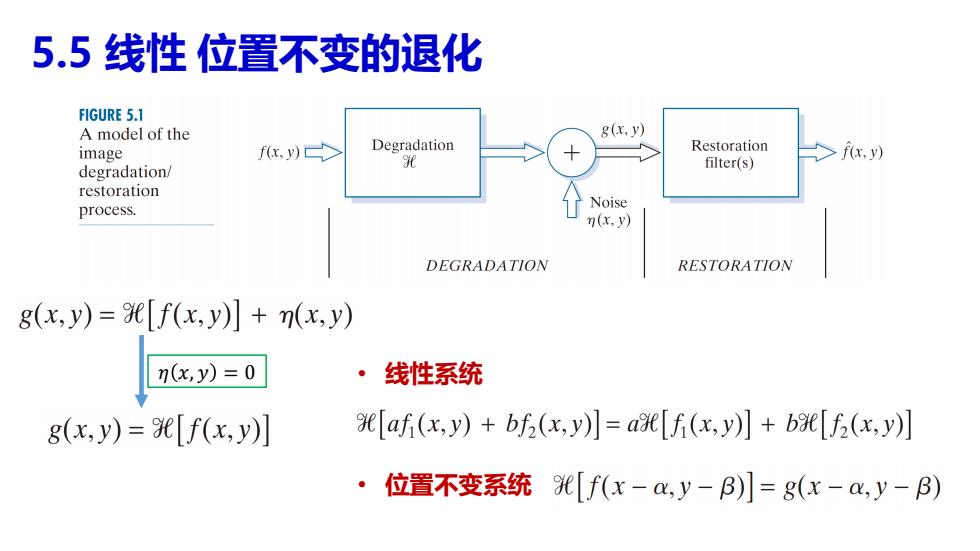
5.5线性位置不变的退化 FIGURE 5.1 A model of the 8(c,y) image f化,) Degradation Restoration degradation/ 9沘 filter(s) f(x,y) restoration process. Noise n(x.y) DEGRADATION RESTORATION g(x,y)=f(x,y)+n(x,y) nx,)=0 ·线性系统 g(x,y)=[f(x,y)] e[af (x,y)+bfz(x,y)]=ae[f (x,y)]+be[fz(x,y)] 。 位置不变系统[f(x-α,y-B)]=g(x-a,y-B)
5.5 线性 位置不变的退化 𝜂 𝑥, 𝑦 = 0 • 线性系统 • 位置不变系统
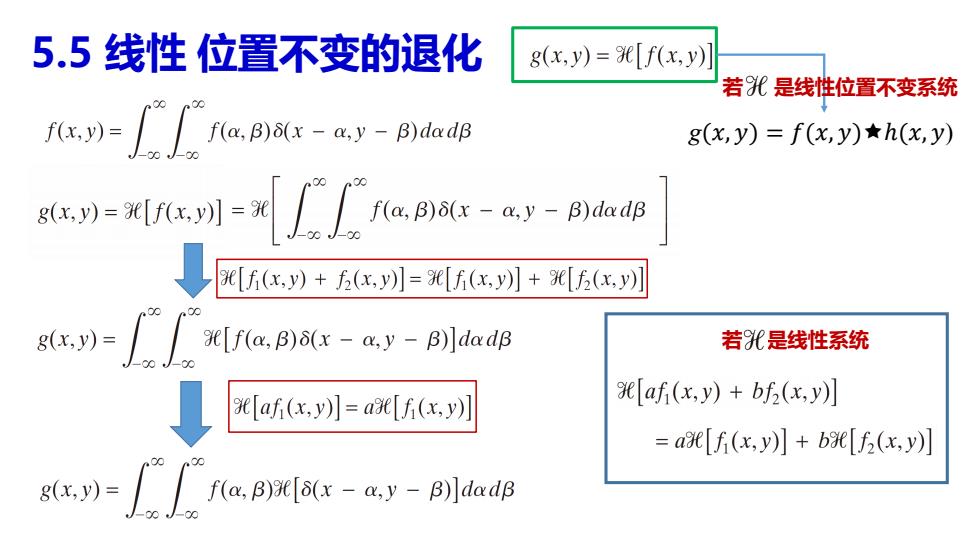
5.5线性位置不变的退化 g(x,y)=[f(x,y)】 若扰是线性位置不变系统 f(x.)=f(a.B)(x-a.y-B)dadB g(x,y)=f(x,y)h(x,y) g(x.y)=[f(x.] f(ar.B)(x-a.y-B)dardB [f(x,y)+f(x,y)]=[f(x,y]+[(x,y)小 8(x,y)= [f(a,B)8(x-a.y-B)]dadB 若沘是线性系统 X[吠(x,y=a[f(x,y)】 af (x,y)+bf(x,y)] =a[f(x,y]+b[f5(x,y)] g(x,y)= fa.B-ay-dadB
5.5 线性 位置不变的退化 g(𝑥, 𝑦ሻ = 𝑓(𝑥, 𝑦ሻℎ(𝑥, 𝑦) 若 是线性系统 若 是线性位置不变系统
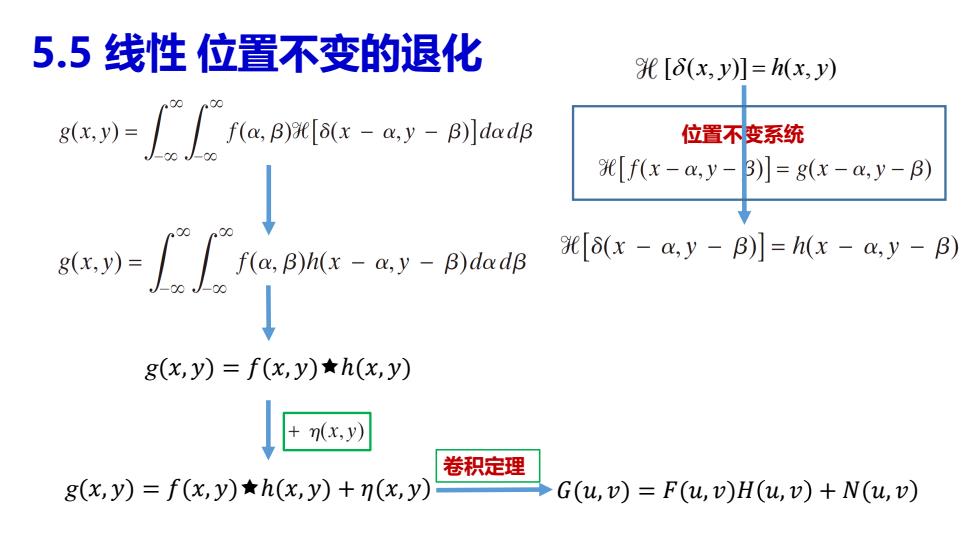
5.5线性位置不变的退化 扰[6(x,y)]=h(x,y) sxW=广fe)ax-ay-dad 位置不变系统 [f(x-a&,y- 3)]=g(x-αy-B) 00 [δ(x-a,y-B)】=h(x-a,y-B) g(x,y)=f(x,y)h(x,y) +x四 卷积定理 g(x,y)=f(x,y)h(x,y)+n(x,y) G(u,v)=F(u,v)H(u,v)+N(u,v)
5.5 线性 位置不变的退化 [ ( , )] ( , ) x y h x y 位置不变系统 g(𝑥, 𝑦ሻ = 𝑓(𝑥, 𝑦ሻℎ(𝑥, 𝑦ሻ + 𝜂(𝑥, 𝑦ሻ 𝐺(𝑢, 𝑣ሻ = 𝐹(𝑢, 𝑣ሻ𝐻 𝑢, 𝑣 + 𝑁(𝑢, 𝑣ሻ 卷积定理 g(𝑥, 𝑦ሻ = 𝑓(𝑥, 𝑦ሻℎ(𝑥, 𝑦ሻ