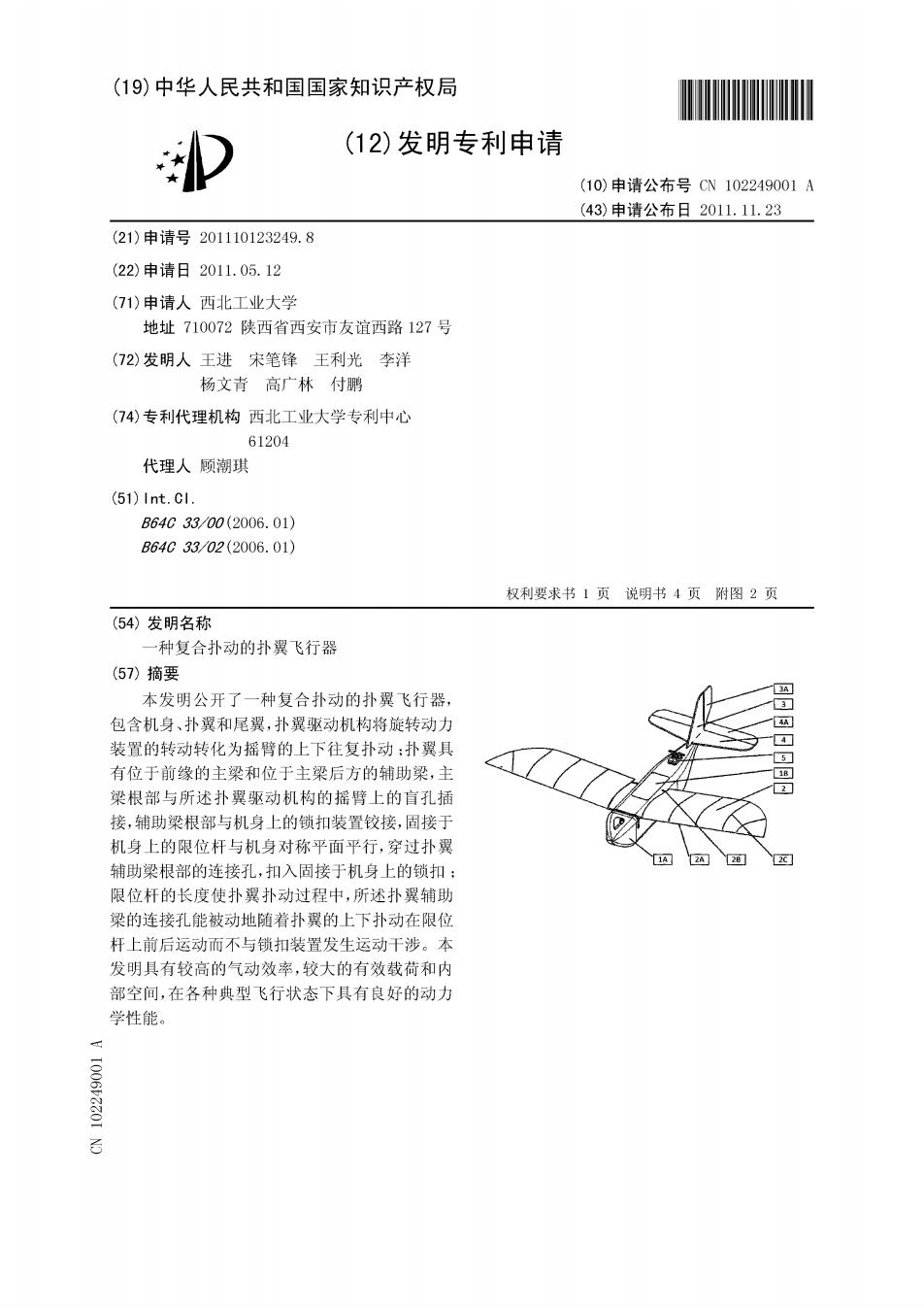
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN102249001A (43)申请公布日2011.11.23 (21)申请号201110123249.8 (22)申请日2011.05.12 (71)申请人西北工业大学 地址710072陕西省西安市友谊西路127号 (72)发明人王进宋笔锋王利光李洋 杨文青高广林付鹏 (74)专利代理机构西北工业大学专利中心 61204 代理人顾潮琪 (51)1nt.cl. B64G3300(2006.01) B6403302(2006.01) 权利要求书1页说明书4页附图2页 (54)发明名称 种复合扑动的扑翼飞行器 (57)摘要 本发明公开了一种复合扑动的扑翼飞行器, 包含机身、扑翼和尾翼,扑翼驱动机构将旋转动力 因 装置的转动转化为摇臂的上下往复扑动:扑翼具 有位于前缘的主梁和位于主梁后方的辅助梁,主 画 2 梁根部与所述扑翼驱动机构的摇臂上的盲孔插 接,辅助梁根部与机身上的锁扣装置铰接,固接于 机身上的限位杆与机身对称平面平行,穿过扑翼 [1A 2A 28☐ 2C 辅助梁根部的连接孔,扣入固接于机身上的锁扣: 限位杆的长度使扑翼扑动过程中,所述扑翼辅助 梁的连接孔能被动地随着扑翼的上下扑动在限位 杆上前后运动而不与锁扣装置发生运动干涉。本 发明具有较高的气动效率,较大的有效载荷和内 部空间,在各种典型飞行状态下具有良好的动力 学性能。 10069220
CN102249001A 权利要求书 1/1页 1.一种复合扑动的扑翼飞行器,包含机身、扑翼和尾翼,其特征在于:所述机身为薄壳 结构,左右对称,分为机头和机体:所述机体内部至少有一个用于安装扑翼驱动机构的支撑 隔框,所述扑翼驱动机构包含左右对称的两个摇臂,能将旋转动力装置的转动转化为摇臂 的上下往复扑动:机体前部有横截面为圆角矩形的等直段,从中部开始,机身水平方向逐渐 向对称平面收缩,高度方向逐渐向上表面收缩,在尾部封闭,收缩段曲面为二次曲面:所述 机头的前端点位于对称平面内较中间位置靠下的位置,所述机头从后部向前收缩汇聚于前 端点,收缩段曲面为二次曲面,机头与机体连接位置上半部分有开口,将扑翼驱动机构的摇 臂伸出且与摇臂无运动干涉:所述扑翼为左右对称的一对,具有位于前缘的主梁和位于主 梁后方的辅助梁,主梁与辅助梁平行或呈平面锐角,若干翼肋分别与主梁和辅助梁胶接,共 同构成骨架,材料均为树脂基碳纤维复合材料,骨架上粘贴聚醚薄膜;主梁根部与所述扑翼 驱动机构的摇臂上的盲孔插接,辅助梁根部与机身上的锁扣装置铰接,固接于机身上的限 位杆与机身对称平面平行,穿过扑翼辅助梁根部的连接孔,扣入固接于机身上的锁扣:限 位杆的长度使扑翼扑动过程中,所述扑翼辅助梁的连接孔能被动地随着扑翼的上下扑动在 限位杆上前后运动而不与锁扣装置发生运动干涉;尾翼包括水平尾翼和垂直尾翼,水平尾 翼安装于机身上表面水平尾翼安装在机身上表面尾端,垂直尾翼垂直地安装于水平尾翼上 方,位于机身对称平面内。 2.根据权利要求1所述的复合扑动的扑翼飞行器,其特征在于:所述的限位杆与锁扣 为整体结构,由弹性金属丝弯折而成。 3.根据权利要求1所述的复合扑动的扑翼飞行器,其特征在于:所述的水平尾翼后缘 有升降舵,垂直尾翼后缘有方向舵,它们由安装在机身上表面的舵机通过连杆操纵。 4.根据权利要求1所述的复合扑动的扑翼飞行器,其特征在于:所述的水平尾翼的尾 容量为0.4-0.5,垂直尾翼的尾容量为0.15-0.25
CN102249001A 说明书 1/4页 一种复合扑动的扑翼飞行器 技术领域 [0001]本发明涉及一种扑翼飞行器,特别是一种微型扑翼飞行器。 背景技术 [0002]微型扑翼飞行器是一种模仿鸟类飞行的新概念飞行器,它具有体积小、重量轻、使 用灵活、效率高等优势,如果搭载传感器和相关的数据传输和飞行控制系统,形成微型扑翼 无人机平台,就会具有广阔的应用前景。围绕这一课题,各国已研制出可控飞行的扑翼飞行 器,其中较成功的有美国Aero Vironment公司与加利福尼亚大学合作的“Microbat”以及 荷兰De1ft大学的“Delfly”等,但这些扑翼飞行器距离实用无人机系统的飞行器平台都有 一定的距离。 [0003]微型扑翼飞行器难以实用化的主要原因是现有微型扑翼飞行器气动效率不足、有 效载荷小、内部空间小,无人机系统的数据传输分系统、飞控导航分系统和任务载荷受到有 效载荷和内部空间的限制难以布置。这是由于扑翼驱动机制多为单纯的平面上下扑动,而 自然界的鸟类和昆虫在飞行过程中,其翼的扑动除了上下运动之外,还附加了前后扫掠以 及翼面绕展向的扭转。对于鸟类和昆虫飞行的相关研究表明,生物扑翼产生升力具有“拍飞 (Clap-Fling)”、“延时失速(Delayed Stall)”、“旋转环流(Rotational Circulation)”和 “尾流捕获(Wake Capture)”四种产生大升力的机理,其中,“拍飞”和“延时失速”是扑动机 翼固有的升力机理,而“旋转环流”和“尾流捕获”则是扑翼旋转产生的效果,因此,复合扑 动模式的气动效率显著高于单纯上下扑动。 [0004]现有微型扑翼飞行器大多通过复杂的扑翼驱动机构实现扑翼的复合运动,这种技 术途径必须以增大扑翼飞行器空机重量和降低可靠性为代价,应用受到了限制。 [0005]中国专利“机械鸟的扑动机构”(授权公告号CN201354146Y,授权公告日2009年 12月2日)公开了一种模拟飞鸟展翅飞行的具有三自由度的扑动装置。该装置采用三个电 机分别驱动曲柄摇杆机构、齿轮齿环机构和齿轮组实现了模仿飞鸟展翅飞行的拍打、扭转 和摆动的三自由度运动。其不足之处是,机构的组成比较复杂,难以轻量化、小型化,不适合 应用于微型扑翼飞行器:整个机构由三个电机及其对应的传动机构分别独立,需要复杂的 控制系统控制三个电机使整个机构的扑动协调,飞控系统的设计难度增加,可靠性降低。 [0006]中国专利“伪仿生扑翼飞机”(授权公告号101618765A,授权公告日2010年1月 6日)由靠近机身前缘与其平行安装的一个扑翼转轴带动两个扑翼上下摆动,扑翼由翼撑 和翼羽组成,翼撑为细长支杆,翼羽沿翼撑轴线等距安装,所有翼羽宽度相同,其长度由小 到大从前向后依次排列,相邻翼羽两两重叠。翼羽由硬质杆和弹性薄片制成,在上扑过程中 可以打开,避免产生负升力。其不足之处是,特殊的机翼设计使整个机翼的转动惯量和气动 阻力增加,需要伺服电机较大的功率输出,增加了扑翼飞机的自重,影响了载荷特性:弹性 薄片变形能力匹配困难,难以获得理想的气动效率:变形能力强,则整个变形过程耗时长, 在扑翼扑动频率较大时响应滞后,无法实现预定的上扑打开、下扑合拢的效果:变形能力太 差,则扑动过程中打开和合拢的幅度较小,效果非常有限
CN102249001A 说明书 2/4页 [0007]中国专利“扑翼轨迹呈8字形的仿生微型飞行器”(授权公告号CN101508343A,授 权公告日2009年8月19日)给出了一种单自由度四连杆拍翼驱动机构,通过两级齿轮减 速器驱动曲柄连杆机构带动拍翼上下拍动,并借由拍翼的弹性变形能力和特定的扑动频率 产生的气动特性实现拍翼轨迹呈8字形的拍动。其不足之处是,由于仅限定了拍翼前缘与 扑动机构的连接方式,而拍翼后缘为一柔性的整体,在拍动频率变化或遇到突风扰动时,其 拍翼结构耦合振动的幅度和相位难以控制和预测,影响气动效率和飞行稳定性,难以实现 预想的8字形拍翼轨迹;其机身采用杆式结构,结构件和扑动机构外露,抗毁伤能力差,且 不利于布置数据链、飞控导航系统、任务载荷等设备,不适合用作微型扑翼无人机系统的飞 行器平台。 发明内容 [0008]为了克服现有技术机构复杂、扑翼飞行器空机重量大和可靠性低的不足,本发明 提供一种能够作为微型扑翼无人机系统飞行器平台的扑翼飞行器,使飞行器整体具备较高 的气动效率,满足无人机系统对载荷和空间的需求,同时控制简单,使用可靠。 [0009]本发明解决其技术问题所采用的技术方案是:包含机身、扑翼和尾翼。所述机身为 薄壳结构,左右对称,分为机头和机体。所述机体内部至少有一个用于安装扑翼驱动机构的 支撑隔框,所述扑翼驱动机构包含左右对称的两个摇臂,能将旋转动力装置的转动转化为 摇臂的上下往复扑动。若所述支撑隔框数量多于一个,除固定所述扑翼驱动机构的支撑隔 框外,其余支撑隔框在机体中起支撑作用,布置于下述锁扣装置、舵机安装位置和尾翼固定 位置等集中载荷作用的位置。机体前部有横截面为圆角矩形的等直段,从中部开始,机身水 平方向逐渐向对称平面收缩,高度方向逐渐向上表面收缩,在尾部封闭,收缩段曲面为二次 曲面。所述机头的前端点位于对称平面内较中间位置靠下位置,一般取为等直段机身高度 40%的位置,所述机头从后部向前收缩汇聚于前端点,收缩段曲面为二次曲面,机头与机体 连接位置上半部分有开口,将扑翼驱动机构的摇臂伸出且与摇臂无运动干涉。 [0010]所述扑翼为左右对称的一对,具有位于前缘的主梁和位于主梁后方的辅助梁,主 梁与辅助梁平行或呈平面锐角,若干翼肋分别与主梁和辅助梁胶接,共同构成骨架,材料均 为树脂基碳纤维复合材料,具有弹性变形能力,骨架上粘贴聚醚薄膜。主梁根部与所述扑翼 驱动机构的摇臂上的盲孔插接。辅助梁根部与机身上的锁扣装置铰接,具体形式是:固接于 机身上的限位杆与机身对称平面平行,穿过扑翼辅助梁根部的连接孔,扣入固接于机身上 的锁扣。限位杆与锁扣为整体结构,由弹性金属丝弯折而成。限位杆的长度使扑翼扑动过 程中,所述扑翼辅助梁的连接孔能被动地随着扑翼的上下扑动在限位杆上前后运动而不与 锁扣装置发生运动干涉。 [0011]锁扣装置的限位杆与摇臂的转轴在同一水平面内,但不共线,左右限位杆之间的 距离大于摇臂轴之间的距离。 [0012]尾翼包括水平尾翼和垂直尾翼,水平尾翼安装于机身上表面水平尾翼安装在机身 上表面尾端,垂直尾翼垂直地安装于水平尾翼上方,位于机身对称平面内。水平尾翼后缘有 升降舵,垂直尾翼后缘有方向舵,它们由安装在机身上表面的舵机通过连杆操纵。水平尾翼 的尾容量为0.4-0.5,垂直尾翼的尾容量为0.15-0.25。 [0013]本发明的有益效果是:
CN102249001A 说明书 3/4页 [0014]根据本发明,扑翼主梁根部与扑翼驱动机构摇臂上的盲孔插接,使扑翼具有绕主 梁轴线转动的自由度,而连接辅助梁的锁扣装置允许辅助梁进行小幅前后移动。由于摇臂 轴和锁扣装置限位杆的位置关系以及扑翼材料的弹性,扑翼在上下扑动的过程中通过弹性 变形附加了绕主梁的转动和前后运动两种运动形式,翼尖扑动轨迹为新月形。这意味着本 发明扑翼的扑动过程伴随着扑翼迎角和后掠角的周期性改变,这些改变的总体效果使扑翼 飞行器能够利用“旋转环流”和“尾流捕获”两种高升力机制,获得较高的气动效率,而不需 要付出重量等方面的代价。 [0015]根据本发明,机身具有等直段,便于安装无人机系统所需的任务载荷、飞控导航分 系统、数据传输分系统等分系统和相关辅助设备。机头前部和机体尾部的形状满足空气动 力学要求,使整个机身具有较小的压差阻力,机头前端点的下偏对应了扑翼飞行器平飞状 态的迎角,使机身作为有效升力体的同时具有较小的升致阻力。机身的横截面形状、结构形 式和材料使其具有轻质、高强、抗冲击的特点,在巡航飞行和机腹着地降落等典型使用状态 下均能满足要求。机身相对封闭,能保护分系统和设备免受飞行过程中沙尘、雨水等外界杂 物的影响,在意外坠毁的情况下机身能够充当吸能结构缓解分系统和设备受到的冲击。 [0016]根据本发明,扑翼主梁根部与扑翼驱动机构摇臂上的盲孔插接,这种约束能有效 避免扑翼扑动过程中主梁从摇臂中脱出。用于连接辅助梁的锁扣装置为整体结构,在前后 两点穿入机身进行固定。飞行过程中,即使由于外力作用使锁扣装置从机身上松脱,仍能保 证辅助梁同锁扣装置正常连接。因此,本发明扑翼与机身的固定方式提高了扑翼飞行器的 可靠性。 [0017]根据本发明,扑翼飞行器通过常规形式的水平尾翼和垂直尾翼满足操纵性和稳定 性要求,操纵形式简单可靠,与常规固定翼飞行器接近,容易与现有自动驾驶仪整合使用。 在给定范围内通过改变尾翼面积调节尾容量,能够按照不同要求调整扑翼飞行器操纵性和 稳定性,获得最为理想的飞行品质。当尾容量取值较小时,尾翼面积较小,阻力较小,适合进 行远距离、长航时的巡航飞行:当尾容量取值较大时,尾翼面积较大,稳定性好,可进行机动 飞行或在风力较大的条件下使用。 [0018]下面结合附图和实施例对本发明进一步说明。 附图说明 [0019]附图1为本发明整机布局示意图; [0020] 附图2为本发明扑翼主梁与扑翼驱动机构摇臂连接示意图; [0021] 附图3为本发明扑翼辅助梁与锁扣装置连接示意图; [0022] 图中: [0023] 1A:机头1B:机体2:扑翼2A:扑翼主梁 [0024] 2B:扑翼辅助梁2C:扑翼翼肋3:垂直尾翼3A:方向舵 [0025] 4:水平尾翼4A:升降舵5:舵机(两个) [0026] 6:扑翼驱动机构摇臂7A:锁扣装置限位杆 [0027] 7B:锁扣装置锁扣 具体实施方式