
第11卷第5期 智能系统学报 Vol.11 No.5 2016年10月 CAAI Transactions on Intelligent Systems 0ct.2016 D0I:10.11992/is.201601036 网s络出版地址:htp:/www.cnki.net/kcms/detail/23.1538.TP.20160921.1116.002.html 基于Hopf振荡器的六足机器人步态CPG模型设计 任杰,徐海东,干苏,王斌锐 (中国计量学院机电工程学院,浙江杭州310018)》 摘要:利用中枢模式发生器实现六足机器人爬行步态是运动仿生的关键。建立机器人坐标系,基于D-H参数求解 正运动学:采用Hof振荡器设计多腿耦合模型:构建由6个CPG单元组成的环形CPG网络拓扑结构,每个CPG单 元由2个耦合的H振荡器组成,分别输出髋关节、踝关节运动信号;采用膝踝映射函数方法,将踝关节输出信号映 射为踝关节和膝关节角度轨迹,从而降低网络中振荡器个数:通过改变耦合系数保证相邻振荡器的相位互锁,输出 稳定平滑信号:搭建实物样机进行步态测试。仿真和实验表明,CPG网络相位差稳定,可实现六足机器人三角步态 下的平稳行走,爬行速度约为6.45cm/s。 关键词:中枢模式发生器:Hpf振荡器;六足机器人;运动学分析 中图分类号:TP242文献标志码:A文章编号:1673-4785(2016)05-0627-08 中文引用格式:任杰,徐海东,干苏,等.基于Hopf振荡器的六足机器人步态CPG模型设计[J].智能系统学报,2016,11(5):627: 634. 英文引用格式:REN Jie,XU Haidong,GAN Su,etal.CPG model design based on hopf oscillator for hexapod robots gait[J]. CAAI transactions on intelligent systems,2016,11(5):627-634. CPG model design based on hopf oscillator for hexapod robots gait REN Jie,XU Haidong,GAN Su,WANG Binrui (College of Mechanical and Electrical Engineering.China Jiliang University.Hangzhou 310018.China) Abstract:The key to bionic motion is a central pattern generator(CPG),which realizes the crawl gait of a hexa- pod.Firstly,the coordinate system of the robot was set up and the associated forward kinematics were solved based on D-H parameters.Hopf oscillators were then adopted into the design of coupling models involving multiple legs.A CPG ring topology structure was established using six CPG units,with each CPG unit consisting of two coupled Hopf oscillators,which output the hip and ankle joint signals,respectively.In order to control each joint (of a hex- apod robot),a knee-ankle mapping function was used.The function mapped the output of the ankle to joint angles for both the knees and ankles.The number of oscillators in the CPG network was reduced using this method.Mean- while,the coupling coefficient was changed to guarantee the phase interlock of adjacent oscillators and give a stable and smooth signal.Finally,a physical prototype was constructed for testing the robotic gait.The simulations and test results show that this CPG network has a stable phase difference,which ensures that hexapod robot can walk stably in a triangular gait and a crawling speed of approximately 6.45 cm/sec can be achieved. Keywords:central pattern generator;Hopf oscillator;hexapod robots;kinematic analysis 六足机器人具有稳定的机械结构、灵活多变的其他生物的节律步态,是根据生物神经节律控制机 行走方式,适合在复杂环境下工作,被广泛应用于灾 理产生的一种自激振荡、相位互锁的运动模式,由位 后探测、环境勘测等工作中。大量研究表明,昆虫及 于生物低级神经中枢的中枢模式发生器(central pattern generator,CPG)产生的信号控制[1-。CPG 收稿日期:2016-01-28.网络出版日期:2016-09-21. 基金项目:国家自然科学基金项目(51575503):浙江省自然科学基金项已被广泛应用于机器鱼、机器海龟、机器果蝇等机器 目(LY14F030021). 通信作者:王斌锐.E-mail:wangbinrui(@163.com 人控制领域)。与传统的基于模型的机器人控制
第 11 卷第 5 期 智 能 系 统 学 报 Vol.11 №.5 2016 年 10 月 CAAI Transactions on Intelligent Systems Oct. 2016 DOI:10.11992 / tis.201601036 网络出版地址:http: / / www.cnki.net / kcms/ detail / 23.1538.TP.20160921.1116.002.html 基于 Hopf 振荡器的六足机器人步态 CPG 模型设计 任杰,徐海东,干苏,王斌锐 (中国计量学院 机电工程学院,浙江 杭州 310018) 摘 要:利用中枢模式发生器实现六足机器人爬行步态是运动仿生的关键。 建立机器人坐标系,基于 D⁃H 参数求解 正运动学;采用 Hopf 振荡器设计多腿耦合模型;构建由 6 个 CPG 单元组成的环形 CPG 网络拓扑结构,每个 CPG 单 元由 2 个耦合的 Hopf 振荡器组成,分别输出髋关节、踝关节运动信号;采用膝踝映射函数方法,将踝关节输出信号映 射为踝关节和膝关节角度轨迹,从而降低网络中振荡器个数;通过改变耦合系数保证相邻振荡器的相位互锁,输出 稳定平滑信号;搭建实物样机进行步态测试。 仿真和实验表明,CPG 网络相位差稳定,可实现六足机器人三角步态 下的平稳行走,爬行速度约为 6.45 cm/ s。 关键词:中枢模式发生器;Hopf 振荡器;六足机器人;运动学分析 中图分类号:TP242 文献标志码:A 文章编号:1673⁃4785(2016)05⁃0627⁃08 中文引用格式:任杰,徐海东,干苏,等.基于 Hopf 振荡器的六足机器人步态 CPG 模型设计[J]. 智能系统学报, 2016, 11(5): 627⁃ 634. 英文引用格式:REN Jie, XU Haidong, GAN Su, et al. CPG model design based on hopf oscillator for hexapod robots gait[ J]. CAAI transactions on intelligent systems, 2016,11(5): 627⁃634. CPG model design based on hopf oscillator for hexapod robots gait REN Jie, XU Haidong, GAN Su, WANG Binrui (College of Mechanical and Electrical Engineering, China Jiliang University, Hangzhou 310018, China) Abstract:The key to bionic motion is a central pattern generator (CPG), which realizes the crawl gait of a hexa⁃ pod. Firstly, the coordinate system of the robot was set up and the associated forward kinematics were solved based on D⁃H parameters. Hopf oscillators were then adopted into the design of coupling models involving multiple legs. A CPG ring topology structure was established using six CPG units, with each CPG unit consisting of two coupled Hopf oscillators, which output the hip and ankle joint signals, respectively. In order to control each joint (of a hex⁃ apod robot), a knee⁃ankle mapping function was used. The function mapped the output of the ankle to joint angles for both the knees and ankles. The number of oscillators in the CPG network was reduced using this method. Mean⁃ while, the coupling coefficient was changed to guarantee the phase interlock of adjacent oscillators and give a stable and smooth signal. Finally, a physical prototype was constructed for testing the robotic gait. The simulations and test results show that this CPG network has a stable phase difference, which ensures that hexapod robot can walk stably in a triangular gait and a crawling speed of approximately 6.45 cm / sec can be achieved. Keywords:central pattern generator; Hopf oscillator; hexapod robots; kinematic analysis 收稿日期:2016⁃01⁃28. 网络出版日期:2016⁃09⁃21. 基金项目:国家自然科学基金项目(51575503);浙江省自然科学基金项 目(LY14F030021). 通信作者:王斌锐. E⁃mail:wangbinrui@ 163.com. 六足机器人具有稳定的机械结构、灵活多变的 行走方式,适合在复杂环境下工作,被广泛应用于灾 后探测、环境勘测等工作中。 大量研究表明,昆虫及 其他生物的节律步态,是根据生物神经节律控制机 理产生的一种自激振荡、相位互锁的运动模式,由位 于生物低级神经中枢的中枢模式发生器( central pattern generator,CPG) 产生的信号控制[1⁃2] 。 CPG 已被广泛应用于机器鱼、机器海龟、机器果蝇等机器 人控制领域[3⁃5] 。 与传统的基于模型的机器人控制
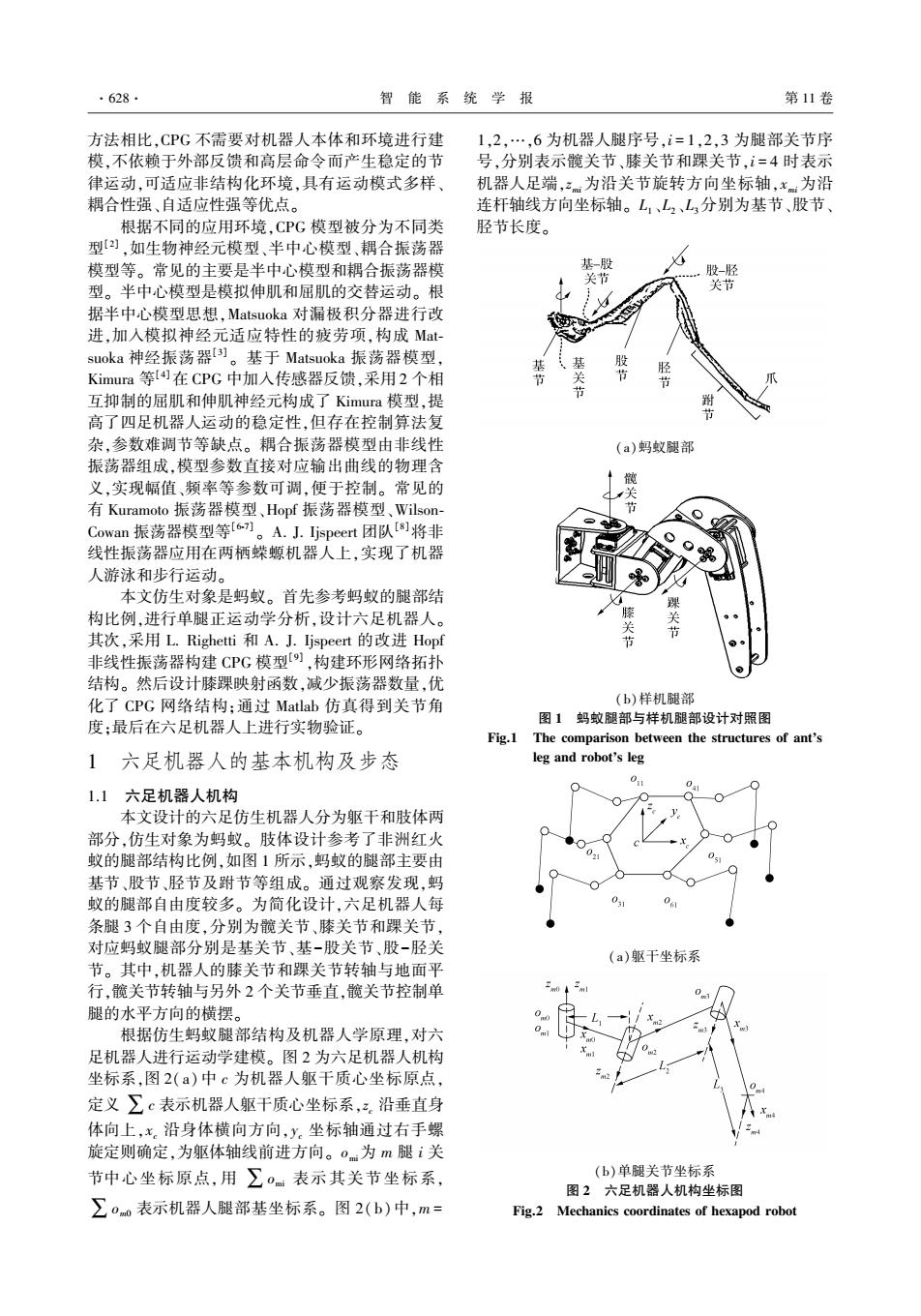
·628. 智能系统学报 第11卷 方法相比,CPG不需要对机器人本体和环境进行建 1,2,…,6为机器人腿序号,i=1,2,3为腿部关节序 模,不依赖于外部反馈和高层命令而产生稳定的节 号,分别表示髋关节、膝关节和踝关节,i=4时表示 律运动,可适应非结构化环境,具有运动模式多样 机器人足端,z为沿关节旋转方向坐标轴,x为沿 耦合性强、自适应性强等优点。 连杆轴线方向坐标轴。L、L2、L分别为基节、股节 根据不同的应用环境,CPG模型被分为不同类 胫节长度。 型[)],如生物神经元模型、半中心模型、耦合振荡器 模型等。常见的主要是半中心模型和耦合振荡器模 股-胫 型。半中心模型是模拟伸肌和屈肌的交替运动。根 据半中心模型思想,Matsuoka对漏极积分器进行改 进,加入模拟神经元适应特性的疲劳项,构成Mat suoka神经振荡器I)。基于Matsuoka振荡器模型, Kimura等[)在CPG中加入传感器反馈,采用2个相 互抑制的屈肌和伸肌神经元构成了Kimura模型,提 高了四足机器人运动的稳定性,但存在控制算法复 节 杂,参数难调节等缺点。耦合振荡器模型由非线性 (a)蚂蚁腿部 振荡器组成,模型参数直接对应输出曲线的物理含 义,实现幅值、频率等参数可调,便于控制。常见的 有Kuramoto振荡器模型、Hopf振荡器模型、Wilson- Cowan振荡器模型等[6-)。A.J.Ijspeert团队[8]将非 线性振荡器应用在两栖蝾螈机器人上,实现了机器 人游泳和步行运动。 本文仿生对象是蚂蚁。首先参考蚂蚁的腿部结 构比例,进行单腿正运动学分析,设计六足机器人。 其次,采用L.Righetti和A.J.Ijspeert的改进Hopf 非线性振荡器构建CPG模型[9),构建环形网络拓扑 结构。然后设计膝踝映射函数,减少振荡器数量,优 化了CPG网络结构:通过Matlab仿真得到关节角 (b)样机腿部 度:最后在六足机器人上进行实物验证。 图1蚂蚊腿部与样机腿部设计对照图 Fig.1 The comparison between the structures of ant's 1 六足机器人的基本机构及步态 leg and robot's leg 1.1六足机器人机构 本文设计的六足仿生机器人分为躯干和肢体两 部分,仿生对象为蚂蚁。肢体设计参考了非洲红火 蚁的腿部结构比例,如图1所示,蚂蚁的腿部主要由 基节、股节、胫节及跗节等组成。通过观察发现,蚂 蚁的腿部自由度较多。为简化设计,六足机器人每 条腿3个自由度,分别为髋关节、膝关节和踝关节, 对应蚂蚁腿部分别是基关节、基-股关节、股-胫关 (a)躯干坐标系 节。其中,机器人的膝关节和踝关节转轴与地面平 行,髋关节转轴与另外2个关节垂直,髋关节控制单 腿的水平方向的横摆。 根据仿生蚂蚁腿部结构及机器人学原理,对六 足机器人进行运动学建模。图2为六足机器人机构 坐标系,图2(a)中c为机器人躯干质心坐标原点, 定义∑c表示机器人躯干质心坐标系,:,沿垂直身 体向上,x。沿身体横向方向,y。坐标轴通过右手螺 旋定则确定,为躯体轴线前进方向。o为m腿i关 节中心坐标原点,用∑0表示其关节坐标系, (b)单腿关节坐标系 图2六足机器人机构坐标图 ∑0o表示机器人腿部基坐标系。图2(b)中,m= Fig.2 Mechanics coordinates of hexapod robot
方法相比,CPG 不需要对机器人本体和环境进行建 模,不依赖于外部反馈和高层命令而产生稳定的节 律运动,可适应非结构化环境,具有运动模式多样、 耦合性强、自适应性强等优点。 根据不同的应用环境,CPG 模型被分为不同类 型[2] ,如生物神经元模型、半中心模型、耦合振荡器 模型等。 常见的主要是半中心模型和耦合振荡器模 型。 半中心模型是模拟伸肌和屈肌的交替运动。 根 据半中心模型思想,Matsuoka 对漏极积分器进行改 进,加入模拟神经元适应特性的疲劳项,构成 Mat⁃ suoka 神经振荡器[3] 。 基于 Matsuoka 振荡器模型, Kimura 等[4]在 CPG 中加入传感器反馈,采用 2 个相 互抑制的屈肌和伸肌神经元构成了 Kimura 模型,提 高了四足机器人运动的稳定性,但存在控制算法复 杂,参数难调节等缺点。 耦合振荡器模型由非线性 振荡器组成,模型参数直接对应输出曲线的物理含 义,实现幅值、频率等参数可调,便于控制。 常见的 有 Kuramoto 振荡器模型、Hopf 振荡器模型、Wilson⁃ Cowan 振荡器模型等[6⁃7] 。 A. J. Ijspeert 团队[8]将非 线性振荡器应用在两栖蝾螈机器人上,实现了机器 人游泳和步行运动。 本文仿生对象是蚂蚁。 首先参考蚂蚁的腿部结 构比例,进行单腿正运动学分析,设计六足机器人。 其次,采用 L. Righetti 和 A. J. Ijspeert 的改进 Hopf 非线性振荡器构建 CPG 模型[9] ,构建环形网络拓扑 结构。 然后设计膝踝映射函数,减少振荡器数量,优 化了 CPG 网络结构;通过 Matlab 仿真得到关节角 度;最后在六足机器人上进行实物验证。 1 六足机器人的基本机构及步态 1.1 六足机器人机构 本文设计的六足仿生机器人分为躯干和肢体两 部分,仿生对象为蚂蚁。 肢体设计参考了非洲红火 蚁的腿部结构比例,如图 1 所示,蚂蚁的腿部主要由 基节、股节、胫节及跗节等组成。 通过观察发现,蚂 蚁的腿部自由度较多。 为简化设计,六足机器人每 条腿 3 个自由度,分别为髋关节、膝关节和踝关节, 对应蚂蚁腿部分别是基关节、基-股关节、股-胫关 节。 其中,机器人的膝关节和踝关节转轴与地面平 行,髋关节转轴与另外 2 个关节垂直,髋关节控制单 腿的水平方向的横摆。 根据仿生蚂蚁腿部结构及机器人学原理,对六 足机器人进行运动学建模。 图 2 为六足机器人机构 坐标系,图 2(a)中 c 为机器人躯干质心坐标原点, 定义 ∑c 表示机器人躯干质心坐标系,zc 沿垂直身 体向上,xc 沿身体横向方向,yc 坐标轴通过右手螺 旋定则确定,为躯体轴线前进方向。 omi为 m 腿 i 关 节中心坐标原点,用 ∑omi 表示其关节坐标系, ∑om0 表示机器人腿部基坐标系。 图 2( b)中,m = 1,2,…,6 为机器人腿序号,i = 1,2,3 为腿部关节序 号,分别表示髋关节、膝关节和踝关节,i = 4 时表示 机器人足端,zmi为沿关节旋转方向坐标轴,xmi为沿 连杆轴线方向坐标轴。 L1 、L2 、L3分别为基节、股节、 胫节长度。 (a)蚂蚁腿部 (b)样机腿部 图 1 蚂蚁腿部与样机腿部设计对照图 Fig.1 The comparison between the structures of ants leg and robots leg (a)躯干坐标系 (b)单腿关节坐标系 图 2 六足机器人机构坐标图 Fig.2 Mechanics coordinates of hexapod robot ·628· 智 能 系 统 学 报 第 11 卷

第5期 任杰,等:基于Hopf振荡器的六足机器人步态CPG模型设计 .629. 1.2正运动学分析 +cos(p+01)(L1+L2cos82+L3cos(02+83)) 根据齐次坐标变换原理,通过齐次变换,可将机 器人腿部基准坐标系∑0变换到躯干质心坐标 +sin(p+0,)(L,+L2c0s82+L3cos(02+03) 系∑c中,变换矩阵T。为 om-Lasine2 -L3sin(02+) T=Trans(之o)·Rot(z,p)(1) (4) 式中:(x,y。o六)为机器人腿部基坐标系到躯干 1.3六足机器人三角步态描述 质心坐标系的平移坐标值,φ为腿部基坐标系 步态指机器人的每条腿按一定顺序和轨迹的运 ∑0。到躯干质心坐标系∑c变换绕z轴的旋转角 动形式,包括通过调整迈步顺序和频率来调整身体 度。将表1中参数带入式(1)中,可以求得机器人 的位姿。 腿部基坐标系与躯干质心坐标系之间的关系。 步态周期T为机器人完成一次完整步态所需 表1基坐标系到躯干质心坐标系变换参数 Table 1 Transformation parameters of base coordinates to 要的时间。机器人单腿的迈步幅度称为步长。占空 geocentric coordinate system 比为单腿在一个步态周期内,处于支撑相的时间在 关节参数12 6 整个步态周期中所占比例,用字母y表示。 34 5 六足机器人步态通常按照与地面接触脚的数目 x..cm 8.810.58.8-8.8-10.5-8.8 来划分。常见有三角步态、跟导步态和波动步态。 y..cm -12.5012.5-12.50 12.5 三角步态是昆虫稳定行走时速度最快的一种步态。 o.cm 00000 0 图3为一个步行周期内六足机器人的三角步态支撑 P/ -135180135-45 0 相与摆动相示意图。白色表示摆动相,黑色阴影表 机器人右侧腿部机构D-H参数如表2所示,0 示支撑相,腿1、腿3、腿5为一组,腿2、腿4、腿6为 表示第i个关节的转动角度。左侧腿D-H参数,除 一组,同组腿相位相同,异组腿相位相差π。机器人 α1=-π2,其他参数与右侧腿一致,均保持不变。 行走时占空比分为3种情形:1)y=0.5,即每条腿的 表2右侧腿部机构D-H参数表 支撑与摆动时间相等,一组腿支撑,另一组腿摆动 Table 2 D-H parameters of the right legs (见图3(a);2)y>0.5,即每条腿支撑时间大于摆 ∑ 动时间,6条腿出现同时着地的情况(见图3(b)), a-1 Qi-1 此种情况下,机器人稳定性较高,但速度较慢;3)γ< ∑,∑m11 0 0 0.5,即每条腿支撑时间小于摆动相时间,6条腿出 现同时悬空状况(见图3(c)),显然,这一情况机器 ∑、∑2 π/2 0 人速度快但稳定性欠佳。占空比对爬行速度有直接 ∑0,、∑,3 L 0 0 影响。本文选择占空比为0.5的三角步态作为研究 对象。 ∑∑a 4 L 0 根据D-H坐标变换法[o,机器人足端点坐标 组2 系∑0,在躯干质心坐标系∑c中的位姿为 0 T/2T 0T/2T 07/2T T=T。0T·0aT0T30T。 (a)y=0.5 (b)y>0.5 (c)y<0.5 图3六足机器人三角步态支撑相与摆动相示意图 (2) Fig.3 Supporting and swinging phases of hexapod ro- 可求得右侧腿的运动学正解为 bot's tripod gait ,+cos(e+8)(L+Lc0s6,+Lcos(8,+6,) 2 CPG振荡器网络模型与仿真 +sin(9+01)(L1+L,cos82+Lcos(82+03))】 2.1CPG振荡器模型 。+Lsin92+L3sin(02+0,) 中枢模式发生器(central pattern generator,CPG) 是一种离散神经网络,能够产生复杂的高维信号控制 (3) 左侧腿的运动学正解为 动物的节律运动回。机器人学上,CPG通常被看作 耦合动态系统,即非线性振荡器模型。CG神经元的
1.2 正运动学分析 根据齐次坐标变换原理,通过齐次变换,可将机 器人腿部基准坐标系 ∑om0 变换到躯干质心坐标 系 ∑c 中,变换矩阵 cTomo 为 cTomo = Trans(xom0 ,yom0 ,zom0 )·Rot(z,φ) (1) 式中:(xom0 ,yom0 ,zom0 )为机器人腿部基坐标系到躯干 质心坐 标 系 的 平 移 坐 标 值, φ 为 腿 部 基 坐 标 系 ∑om0 到躯干质心坐标系 ∑c 变换绕 z 轴的旋转角 度。 将表 1 中参数带入式(1) 中,可以求得机器人 腿部基坐标系与躯干质心坐标系之间的关系。 表 1 基坐标系到躯干质心坐标系变换参数 Table 1 Transformation parameters of base coordinates to geocentric coordinate system 关节参数 1 2 3 4 5 6 xom0 / cm 8.8 10.5 8.8 -8.8 -10.5 -8.8 yom0 / cm -12.5 0 12.5 -12.5 0 12.5 zom0 / cm 0 0 0 0 0 0 φ/ ° -135 180 135 -45 0 45 机器人右侧腿部机构 D⁃H 参数如表 2 所示,θi 表示第 i 个关节的转动角度。 左侧腿 D⁃H 参数,除 a1 = -π /2,其他参数与右侧腿一致,均保持不变。 表 2 右侧腿部机构 D⁃H 参数表 Table 2 D⁃H parameters of the right legs ∑ i ai-1 αi-1 di θi ∑om0 、∑om1 1 0 0 0 θ1 ∑om1 、∑om2 2 L1 p/2 0 θ2 ∑om2 、∑om3 3 L2 0 0 θ3 ∑om3 、∑om4 4 L3 0 0 0 根据 D⁃H 坐标变换法[10] ,机器人足端点坐标 系 ∑om4 在躯干质心坐标系 ∑c 中的位姿为 cTom4 = cTom0 ·om0 Tom1 ·om1 Tom2 ·om2 Tom3 ·om3 Tom4 (2) 可求得右侧腿的运动学正解为 xom4 yom4 zom4 é ë ê ê ê ê ê ù û ú ú ú ú ú = xom0 + cos(φ + θ1)(L1 + L2 cosθ2 + L3 cos(θ2 + θ3)) yom0 + sin(φ + θ1)(L1 + L2 cosθ2 + L3 cos(θ2 + θ3)) zom0 + L2 sinθ2 + L3 sin(θ2 + θ3 ) é ë ê ê ê ê ê ù û ú ú ú ú ú (3) 左侧腿的运动学正解为 xom4 yom4 zom4 é ë ê ê ê ê ê ù û ú ú ú ú ú = xom0 + cos(φ + θ1)(L1 + L2 cosθ2 + L3 cos(θ2 + θ3)) yom0 + sin(φ + θ1)(L1 + L2 cosθ2 + L3 cos(θ2 + θ3)) zom0 - L2 sinθ2 - L3 sin(θ2 + θ3 ) é ë ê ê ê ê ê ù û ú ú ú ú ú (4) 1.3 六足机器人三角步态描述 步态指机器人的每条腿按一定顺序和轨迹的运 动形式,包括通过调整迈步顺序和频率来调整身体 的位姿[11] 。 步态周期 T 为机器人完成一次完整步态所需 要的时间。 机器人单腿的迈步幅度称为步长。 占空 比为单腿在一个步态周期内,处于支撑相的时间在 整个步态周期中所占比例,用字母 γ 表示。 六足机器人步态通常按照与地面接触脚的数目 来划分。 常见有三角步态、跟导步态和波动步态。 三角步态是昆虫稳定行走时速度最快的一种步态。 图 3 为一个步行周期内六足机器人的三角步态支撑 相与摆动相示意图。 白色表示摆动相,黑色阴影表 示支撑相,腿 1、腿 3、腿 5 为一组,腿 2、腿 4、腿 6 为 一组,同组腿相位相同,异组腿相位相差 π。 机器人 行走时占空比分为 3 种情形:1)γ = 0.5,即每条腿的 支撑与摆动时间相等,一组腿支撑,另一组腿摆动 (见图 3(a));2) γ>0.5,即每条腿支撑时间大于摆 动时间,6 条腿出现同时着地的情况(见图 3( b)), 此种情况下,机器人稳定性较高,但速度较慢;3)γ< 0.5,即每条腿支撑时间小于摆动相时间,6 条腿出 现同时悬空状况(见图 3(c)),显然,这一情况机器 人速度快但稳定性欠佳。 占空比对爬行速度有直接 影响。 本文选择占空比为 0.5 的三角步态作为研究 对象。 图 3 六足机器人三角步态支撑相与摆动相示意图 Fig.3 Supporting and swinging phases of hexapod ro⁃ bot’s tripod gait 2 CPG 振荡器网络模型与仿真 2.1 CPG 振荡器模型 中枢模式发生器(central pattern generator, CPG) 是一种离散神经网络,能够产生复杂的高维信号控制 动物的节律运动[12] 。 机器人学上,CPG 通常被看作 耦合动态系统,即非线性振荡器模型。 CPG 神经元的 第 5 期 任杰,等:基于 Hopf 振荡器的六足机器人步态 CPG 模型设计 ·629·

·630. 智能系统学报 第11卷 自发振动性与传统的机械振动类似,是通过采用互相 1.5 连接的单个或者多个非线性振荡器来模拟CPG产生 1.0 信号。其中非线性振荡器都有极限环,若极限环稳 定,系统中所有的轨迹都会接近该极限环,这样即使 系统中有小的扰动,系统也能回到稳定状态。 Hopf振荡器存在一个稳定的极限环,邻域中的 -0.5 轨线都螺旋趋近该极限环,具有很好的稳定性。与 -1.0 传统Hopf振荡器相比,本文采用改进的Hopf振荡 -1.5 -1.0-0.500.51.01.5 器作为机器人信号发生器,不仅可以实现幅值频率 可调,还可以独立调节支撑相与摆动相的相位关系, (b)x与y的相平面图 易于实现六足机器人腿部控制。其数学模型为 1.5 元=a(u-x2-y2)x-y (5) 1.0 y=B(u-x2-y2)y +wx (6) 0.5 0 w÷ (7) e-h+1 eha+1 -0.5 式中:振幅为瓜,频率为o,oum与wi分别表示 -1.0 支撑相摆动相 -1.5 支撑相和摆动相的频率,b是一个较大的正值,保证 0 5 10 15 20 振荡器的频率在支撑相与摆动相之间能取到不同的 s (c)输出y的振荡曲线 值:a>0B>0控制极限环收敛速度,其值越大,收敛 图4Hopf振荡器的极限环形式 越快:x和y是振荡器的2个状态变量,规定y的输 Fig.4 Hopf oscillator's limit cycle behavior 出作为振荡器信号的输出。 由图4(c)可见,该振荡器能自发地产生稳定的 令x=rcoso,y=rsino,y=ot,极坐标形式为 周期振荡信号,方便调节上升和下降时间,从而很好 (=r(μ-2)》 (8) 地模拟了生物系统中的CPG神经元。 (9=w 要实现六足机器人腿部之间的协调运动,需要 如图4(a)所示,当μ≤0时,系统有唯一的渐近稳 振荡器的相互耦合,保证运动的同步性与协调性。 定焦点(0,0):当4≥0时,系统在u=0发生突变, (0,0)成为不稳定焦点,出现Hopf分岔,并且系统存在 耦合关系为 (9) 一个稳定的极限环r=瓜。利用μ>0时系统的极限环 =a(u-r)x:-@yi 特性实现CPG的振荡输出。图4(b)为不同初值下 方=B(u-)y:+w,x+6·∑4(10) Hopf振荡器状态变量x与y的相平面图,黑点表示初 △方=(y·cosf-x·sin68) (11) 值。从图中看出,无论初值大小,除(0,O)奇点外,Hopf 极限环都是稳定的。通过控制输出的上升和下降时 @= + e-br 1 ek 1 (12) 间,可以控制支撑相和摆动相的相位时间,这里取 将式(10)与式(6)对比,式(10)中加入了多项 ωg=3we=1,输出波形如图4(c)所示。 式δ·∑4,8表示振荡器之间耦合强度,(表示第 i个振荡器与第j个振荡器之间的相位差。取ω= ωwmg,收敛系数a=B=1,通过设定不同的相位差 0;,其值分别取0、/4、π/2、T,可以得到第1个和第 2个振荡器的输出曲线,如图5所示。 2.2环形CPG网络模型构建 六足机器人的CPG网络拓扑结构由6个CPG (a)μ变化的平衡点与极限环图 单元构成,每个CPG单元对应六足机器人的一条 腿,由Hopf振荡器组成。采用加权有向图构成网状
自发振动性与传统的机械振动类似,是通过采用互相 连接的单个或者多个非线性振荡器来模拟 CPG 产生 信号。 其中非线性振荡器都有极限环,若极限环稳 定,系统中所有的轨迹都会接近该极限环,这样即使 系统中有小的扰动,系统也能回到稳定状态。 Hopf 振荡器存在一个稳定的极限环,邻域中的 轨线都螺旋趋近该极限环,具有很好的稳定性。 与 传统 Hopf 振荡器相比,本文采用改进的 Hopf 振荡 器作为机器人信号发生器,不仅可以实现幅值频率 可调,还可以独立调节支撑相与摆动相的相位关系, 易于实现六足机器人腿部控制。 其数学模型为 x · = α(μ - x 2 - y 2 )x - ωy (5) y · = β(μ - x 2 - y 2 )y + ωx (6) ω = ωstance e -bx + 1 + ωswing e bx + 1 (7) 式中:振幅为 μ ,频率为 ω,ωstance 与 ωswing 分别表示 支撑相和摆动相的频率,b 是一个较大的正值,保证 振荡器的频率在支撑相与摆动相之间能取到不同的 值;α>0、β>0 控制极限环收敛速度,其值越大,收敛 越快;x 和 y 是振荡器的 2 个状态变量,规定 y 的输 出作为振荡器信号的输出。 令 x = rcosφ,y = rsinφ,γ =ωt,极坐标形式为 r · = r(μ - r 2 ) φ · = ω { (8) 如图 4(a)所示,当 μ≤0 时,系统有唯一的渐近稳 定焦点(0, 0);当 μ≥0 时,系统在 μ = 0 发生突变, (0, 0)成为不稳定焦点,出现 Hopf 分岔,并且系统存在 一个稳定的极限环 r = μ。 利用 μ>0 时系统的极限环 特性实现 CPG 的振荡输出。 图 4(b)为不同初值下 Hopf 振荡器状态变量 x 与 y 的相平面图,黑点表示初 值。 从图中看出,无论初值大小,除(0, 0)奇点外,Hopf 极限环都是稳定的。 通过控制输出的上升和下降时 间,可以控制支撑相和摆动相的相位时间,这里取 ωswing =3ωstance,μ=1,输出波形如图 4(c)所示。 (a)μ 变化的平衡点与极限环图 (b)x 与 y 的相平面图 (c) 输出 y 的振荡曲线 图 4 Hopf 振荡器的极限环形式 Fig.4 Hopf oscillators limit cycle behavior 由图 4(c)可见,该振荡器能自发地产生稳定的 周期振荡信号,方便调节上升和下降时间,从而很好 地模拟了生物系统中的 CPG 神经元。 要实现六足机器人腿部之间的协调运动,需要 振荡器的相互耦合,保证运动的同步性与协调性。 耦合关系为 x · i = α(μ - r 2 i )xi - ωi yi (9) y · i = β(μ - r 2 i )yi + ωi xi + δ·∑ j Δji (10) Δji = (yj·cosθ i j - xj·sinθ i j ) (11) ω = ωstance e -bx + 1 + ωswing e bx + 1 (12) 将式(10)与式(6)对比,式(10)中加入了多项 式 δ·∑ j Δji ,δ 表示振荡器之间耦合强度,θ i j 表示第 i 个振荡器与第 j 个振荡器之间的相位差。 取 ωstance = ωswing,收敛系数 α = β = 1,通过设定不同的相位差 θ 1 2 ,其值分别取 0、π/ 4、π/ 2、π,可以得到第 1 个和第 2 个振荡器的输出曲线,如图 5 所示。 2.2 环形 CPG 网络模型构建 六足机器人的 CPG 网络拓扑结构由 6 个 CPG 单元构成,每个 CPG 单元对应六足机器人的一条 腿,由 Hopf 振荡器组成。 采用加权有向图构成网状 ·630· 智 能 系 统 学 报 第 11 卷

第5期 任杰,等:基于Hopf振荡器的六足机器人步态CPG模型设计 ·631· 结构,6个CPG单元作为有向图的6个顶点,相邻顶 点之间采用全对称的双向连接。CPG网络拓扑结 构如图6所示,在三角步态下,将腿分成{1,3,5}和 {2,4,6}两组。同组腿相位相同,异组腿相位相反。 图6环形CPG网络拓扑结构图 30 Fig.6 The ring-type network topology of CPG 2.3关节轨迹设计方案 (a)0,=0 六足机器人行走过程中,单腿关节角度具有如 下规律:1)摆动相时,腿向前摆,髋关节角度增大, 膝关节先正转再反转回到平衡位置,膝关节角度先 增大后减小,踝关节转角与膝关节变化规律相同: 2)支撑相时,腿后摆,髋关节角度减小,膝关节与踝 关节角度几乎保持不变。 机器人有6条腿18个关节,如果每个关节都采 10 20 30 s 用1个振荡器,需要18个振荡器,会使CPG网络过 (仙)G=牙 于复杂,非线性微分方程阶数过高,不利于CPG网 络的参数优化和求解。 机器人在运动过程中,各关节之间相互配合,具 有一定联系。为了简化模型结构,采用膝踝映射函 数,根据踝关节的转角得到膝关节的转角。单腿 CPG控制规律如下:1个CPG单元对应2个Hopf振 荡器,输出信号相互耦合,分别控制髋关节、踝关节, 膝关节信号通过膝踝映射函数得到。图7为2个 10 30 Hopf振荡器生成的髋关节与踝关节的相位关系,其 中y1为髋关节控制信号,y2为踝关节控制信号,调 (c)片=2 节两者频率值比为1:2,且两者保持固定的相位差。 2.0 1.5 1.0 0.5 0.5 -1.0 -2 10 20 30 10 15 t/s (d)=T 图5两个耦合振荡器不同相位差输出波形图 图7三角步态髋关节、踝关节相位关系曲线 Fig.5 The CPG network formed by two oscillators un- Fig.7 Tripod gait's phase curve between hip joint and der different phase difference settings ankle joint
结构,6 个 CPG 单元作为有向图的 6 个顶点,相邻顶 点之间采用全对称的双向连接。 CPG 网络拓扑结 构如图 6 所示,在三角步态下,将腿分成{1,3,5}和 {2,4,6}两组。 同组腿相位相同,异组腿相位相反。 (a)θ 1 2 = 0 (b)θ 1 2 = π 4 (c)θ 1 2 = π 2 (d)θ 1 2 =π 图 5 两个耦合振荡器不同相位差输出波形图 Fig.5 The CPG network formed by two oscillators un⁃ der different phase difference settings 图 6 环形 CPG 网络拓扑结构图 Fig.6 The ring⁃type network topology of CPG 2.3 关节轨迹设计方案 六足机器人行走过程中,单腿关节角度具有如 下规律:1) 摆动相时,腿向前摆,髋关节角度增大, 膝关节先正转再反转回到平衡位置,膝关节角度先 增大后减小,踝关节转角与膝关节变化规律相同; 2)支撑相时,腿后摆,髋关节角度减小,膝关节与踝 关节角度几乎保持不变。 机器人有 6 条腿 18 个关节,如果每个关节都采 用 1 个振荡器,需要 18 个振荡器,会使 CPG 网络过 于复杂,非线性微分方程阶数过高,不利于 CPG 网 络的参数优化和求解。 机器人在运动过程中,各关节之间相互配合,具 有一定联系。 为了简化模型结构,采用膝踝映射函 数,根据踝关节的转角得到膝关节的转角。 单腿 CPG 控制规律如下:1 个 CPG 单元对应 2 个 Hopf 振 荡器,输出信号相互耦合,分别控制髋关节、踝关节, 膝关节信号通过膝踝映射函数得到。 图 7 为 2 个 Hopf 振荡器生成的髋关节与踝关节的相位关系,其 中 y1 为髋关节控制信号,y2 为踝关节控制信号,调 节两者频率值比为 1:2,且两者保持固定的相位差。 图 7 三角步态髋关节、踝关节相位关系曲线 Fig.7 Tripod gaits phase curve between hip joint and ankle joint 第 5 期 任杰,等:基于 Hopf 振荡器的六足机器人步态 CPG 模型设计 ·631·