第11卷第1期 智能系统学报 Vol.11 No.1 2016年2月 CAAI Transactions on Intelligent Systems Feb.2016 D0I:10.11992/is.201506011 网络出版地址:http:/www.cnki.net/kcms/detail/23.1538.TP.20160218.1452.002.html 仿生模式识别技术研究与应用进展 陈阳,覃鸿2,李卫军2,周新奇3,董肖莉2,张丽萍2,李浩光2 (1.工业和信息化部中国电子信息产业发展研究院,北京100846:2.中国科学院半导体研究所高速电路与神经网 络实验室,北京100083:3.聚光科技(杭州)股份有限公司,浙江杭州310052)】 摘要:回顾了仿生模式识别与传统模式识别的本质区别,与传统模式识别“分类划分”思想不同,仿生模式识别把 模式识别问题看成是各类样本的“认识”,并将“同源连续性”规律作为先验知识,用高维空间几何形体覆盖方法实现 对同类事物的学习,因此克服了传统模式识别的缺点。其有效性逐渐受到学者的广泛关注。分析总结了目前已有 的仿生模式识别方法的研究和应用,方法研究包括样本点分布的拓扑分析、覆盖算法和重叠空间中样本的归属:应 用研究方面包括目标识别、生物特征识别、文本识别、近红外光谱定性分析等。分析表明仿生模式识别是创新、有效 的模式识别方法。最后指出同类样本点分布流形的分析方法和高维空间拓扑理论与算法研究等是仿生模式识别未 来重要的发展方向。 关键词:模式识别:仿生模式识别:同源连续性:拓扑分析:覆盖算法:目标识别:生物特征识别;文本识别 中图分类号:TP391文献标志码:A文章编号:1673-4785(2016)01-0001-14 中文引用格式:陈阳,覃鸿,李卫军,等.仿生模式识别技术研究与应用进展[J].智能系统学报,2016,11(1):1-14. 英文引用格式:CHEN Yang,QIN Hong,LI Weijun,etal.Progress in research and application of biomimetic pattern recognition technology[J].CAAI Transactions on Intelligent Systems,2016,11(1):1-14. Progress in research and application of biomimetic pattern recognition technology CHEN Yang',QIN Hong,LI Weijun2,ZHOU Xinqi,DONG Xiaoli2,ZHANG Liping,LI Haoguang? (1.China Center of Information Industry Development,Ministry of Industry and Information Technology of the People's Republic of China,Beijing 100846,China;2.Institute of Semiconductors,Chinese Academy of Sciences,Beijing 100083,China;3.Focused Photonics Hangzhou),Inc.,Hangzhou 310052,China) Abstract:An essential difference between traditional pattern recognition and biomimetic pattern recognition(BPR) is reviewed.Different from the idea of "matter classification"of traditional pattern recognition,BPR considers the problem of pattern recognition as the "cognition"of every type of sample,uses the principle of"homology continui- ty"as a priori knowledge,and performs class recognition by a union of geometrical cover sets in high-dimensional space and feature space,thus overcoming the shortcomings of traditional pattern recognition.The effectiveness of BPR has gradually drawn extensive attention from scholars.In this study,research on BPR and its applications are summarized.The research method includes the topological analysis of the distribution of sample points,covering al- gorithm research,and a sample's attribute in the overlapping space.Applications of BPR involve object recogni- tion,biometric identification,text recognition,NIR spectroscopy qualitative analysis,and so on.Results show that BPR is an innovative and effective means of pattern recognition.Finally,important development directions of BPR are reported,such as manifold analytical methods of sample distribution in the same class,topological theory,and algorithm research in a high-dimensional space. Keywords:pattern recognition;biomimetic pattern recognition;homology continuity;topological analysis;covering algorithm;object recognition;biometric feature identification;text recognition 模式识别经过多年的发展,已形成了一系列经 典的理论和方法。传统模式识别的目的是将对象 (样本)进行分类,因此也被称作模式分类山,传统 收稿日期:2015-06-08.网络出版日期:2016-02-18. 基金项目:国家自然科学基金资助项目(61572458):国家重大科学仪器 模式识别认为所有可用的信息都包含在训练样本集 设备开发专项项目(2014YQ470377):国家公派访问学者资 助项目(留金发[2014]3012号). 中,考虑的出发点是特征空间中若干类别样本的最 通信作者:陈阳.E-mail:z.zhou@scu.cdu.cn
第 11 卷第 1 期 智 能 系 统 学 报 Vol.11 №.1 2016 年 2 月 CAAI Transactions on Intelligent Systems Feb. 2016 DOI:10.11992 / tis.201506011 网络出版地址:http: / / www.cnki.net / kcms/ detail / 23.1538.TP.20160218.1452.002.html 仿生模式识别技术研究与应用进展 陈阳1 ,覃鸿2 ,李卫军2 ,周新奇3 ,董肖莉2 ,张丽萍2 ,李浩光2 (1.工业和信息化部 中国电子信息产业发展研究院,北京 100846; 2. 中国科学院半导体研究所 高速电路与神经网 络实验室,北京 100083; 3.聚光科技(杭州)股份有限公司,浙江 杭州 310052) 摘 要:回顾了仿生模式识别与传统模式识别的本质区别,与传统模式识别“分类划分”思想不同,仿生模式识别把 模式识别问题看成是各类样本的“认识”,并将“同源连续性”规律作为先验知识,用高维空间几何形体覆盖方法实现 对同类事物的学习,因此克服了传统模式识别的缺点。 其有效性逐渐受到学者的广泛关注。 分析总结了目前已有 的仿生模式识别方法的研究和应用,方法研究包括样本点分布的拓扑分析、覆盖算法和重叠空间中样本的归属;应 用研究方面包括目标识别、生物特征识别、文本识别、近红外光谱定性分析等。 分析表明仿生模式识别是创新、有效 的模式识别方法。 最后指出同类样本点分布流形的分析方法和高维空间拓扑理论与算法研究等是仿生模式识别未 来重要的发展方向。 关键词:模式识别;仿生模式识别;同源连续性;拓扑分析;覆盖算法;目标识别;生物特征识别;文本识别 中图分类号:TP391 文献标志码:A 文章编号:1673⁃4785(2016)01⁃0001⁃14 中文引用格式:陈阳,覃鸿,李卫军,等.仿生模式识别技术研究与应用进展[J]. 智能系统学报, 2016, 11(1): 1⁃14. 英文引用格式:CHEN Yang, QIN Hong, LI Weijun,et al. Progress in research and application of biomimetic pattern recognition technology[J]. CAAI Transactions on Intelligent Systems, 2016, 11(1):1⁃14. Progress in research and application of biomimetic pattern recognition technology CHEN Yang 1 , QIN Hong 2 , LI Weijun 2 , ZHOU Xinqi 3 , DONG Xiaoli 2 , ZHANG Liping 2 , LI Haoguang 2 (1. China Center of Information Industry Development, Ministry of Industry and Information Technology of the People’ s Republic of China, Beijing 100846, China; 2. Institute of Semiconductors, Chinese Academy of Sciences, Beijing 100083, China; 3. Focused Photonics (Hangzhou), Inc., Hangzhou 310052, China) Abstract:An essential difference between traditional pattern recognition and biomimetic pattern recognition (BPR) is reviewed. Different from the idea of “matter classification” of traditional pattern recognition, BPR considers the problem of pattern recognition as the “cognition” of every type of sample, uses the principle of “homology continui⁃ ty” as a priori knowledge, and performs class recognition by a union of geometrical cover sets in high⁃dimensional space and feature space, thus overcoming the shortcomings of traditional pattern recognition. The effectiveness of BPR has gradually drawn extensive attention from scholars. In this study, research on BPR and its applications are summarized. The research method includes the topological analysis of the distribution of sample points, covering al⁃ gorithm research, and a sample’ s attribute in the overlapping space. Applications of BPR involve object recogni⁃ tion, biometric identification, text recognition, NIR spectroscopy qualitative analysis, and so on. Results show that BPR is an innovative and effective means of pattern recognition. Finally, important development directions of BPR are reported, such as manifold analytical methods of sample distribution in the same class, topological theory, and algorithm research in a high⁃dimensional space. Keywords:pattern recognition; biomimetic pattern recognition; homology continuity; topological analysis; covering algorithm; object recognition; biometric feature identification; text recognition 收稿日期:2015⁃06⁃08. 网络出版日期:2016⁃02⁃18. 基金项目:国家自然科学基金资助项目(61572458);国家重大科学仪器 设备开发专项项目( 2014YQ470377);国家公派访问学者资 助项目(留金发[2014]3012 号). 通信作者:陈阳.E⁃mail:xz.zhou@ scu.edu.cn. 模式识别经过多年的发展,已形成了一系列经 典的理论和方法。 传统模式识别的目的是将对象 (样本)进行分类,因此也被称作模式分类[1] ,传统 模式识别认为所有可用的信息都包含在训练样本集 中,考虑的出发点是特征空间中若干类别样本的最
·2 智能系统学 报 第11卷 佳分类划分,代表性方法有Fisher判别分析2]、支撑 并且学习某类时不需要负样本(非此类或他类样 向量机(SVM)[]等。这些方法解决了很多问题,并 本)参加训练,学习新类时不需要重新学习已知类 在多个领域得到了成功应用,为科学发展和社会进 即不会影响原有已经学习好的知识: 步做出了巨大贡献,但这些传统方法也存在一些固 3)仿生模式识别在低训练样本数量情况下仍 有的缺陷:1)对事物进行学习时通常至少需要两类 能获得较高的正确识别率,这得益于引入了“同源 才可进行“区分”,例如在人脸检测中,学习的任务 连续性规律“的先验知识,因而有效的信息不再局 仅是人脸这一个类别,但在训练分类器时,分类器需 限于训练样本。低训练样本数、高识别率的特点,更 要学习“人脸”和“非人脸”两种类型;2)已训练好的 适合一些不易获取大量训练样本的特殊场合下的识 分类器类别之间的最优分类边界是确定的,若要增 别任务。 加学习新类,则需要重新训练分类器,这将会打乱现 仿生模式识别由于其独特的优点,在国内逐渐 有知识(最优分类边界改变):3)未经训练类别的样 受到关注,越来越多的研究机构加入研究队伍,从理 本很容易被误认为是已训练的某一类,分类器不能 论、方法以及应用等多方面开展研究,这些研究机构 有效对其进行正确拒识,这是由于分类边界只是将 包括中科院半导体研究所、同济大学、中国农业大 ·个无限特征空间划分为多个无限空间。 学、浙江工业大学、厦门大学、深圳大学、中科院苏州 中国科学院半导体研究所王守觉院士通过分析 纳米技术与纳米仿生研究所、长沙理工大学、合肥工 人类认识事物的特点,提出了一种全新思想的模式 业大学、吉林大学、西安电子科技大学等众多高校和 识别方法一仿生模式识别(biomimetic pattern rec- 研究机构。仿生模式识别的研究成果不断涌现,先 ognition,BPR)。仿生模式识别认为,事物具有 后用于目标识别、生物特征识别、信号处理、医学图 “同源连续性规律”,即同类事物的两个不同样本之 像识别、基因预测和近红外定性分析,涉及机器视 间,至少有一个渐变过程,在这个渐变过程中的所有 觉、安防、农业、生物医学、通信以及互联网等众多领 样本仍属于该类:也可以这样认为:同类样本在特征 域,获得了有益的效果。2002年迄今,在国内学术 空间中是连续分布的,任意两个样本点之间具有某 期刊发表的与仿生模式识别直接相关的论文有80 种连续变化的关系。“同源连续性规律”是现实中 余篇,相关的国内硕士和博士学位论文30余篇,在 人类直观认识世界的普遍存在的规律,同时也是仿 国际期刊和会议上发表的论文40篇左右,此外,还 生模式识别方法用于提高对事物的识别能力的“先 有3本专著出版[s刃。 验知识”。引入“同源连续性规律”后,研究仿生模 仿生模式识别是我国自主创新的方法与技术, 式识别如何对某类事物进行学习,就是研究在高维 从提出至今,已有十多年的发展,但目前还没有对该 特征空间中如何对该类样本进行最优连续“覆盖” 技术的全面总结。本文旨在对仿生模式识别进行全 (即对一类样本的“识”):它不同于传统模式识别方 面的综述。首先介绍仿生模式识别的基本原理,再 法侧重于“别”,即如何在高维特征空间中对不同类 对仿生模式识别的实现方法进行分析和对比研究 样本进行最优“划分”。可见,在特征空间中对某一 并给出了仿生模式识别在多个应用领域的使用效 类样本的分布进行最优覆盖是仿生模式识别的首要 果,最后探讨仿生模式识别的未来研究方向,希望能 目标,覆盖后在特征空间中形成的连续、闭合的复杂 够为该方法的进一步发展和实际应用提供参考。 几何形体区域赋予该类的属性:则仿生模式识别的 1 仿生模式识别的基本原理 识别过程就是判断特征空间中待识别样本点是否落 入此几何形体内。若是,则该样本点属于此几何形 1.1仿生模式识别的基点一“同源连续性”规律 体所代表的类别;否则认为不属于该类。仿生模式 仿生模式识别把同一类事物称为“同源”,这里 识别于2002年被提出后,被迅速应用到多种识别任 所谓的“同一类”是指在源头或原理上是相同的一 务中,获得了有效的识别结果,并展现出独特的 类,而不是拼凑或合并而成的同一类。例如,在手写 优势: 体汉字识别中,同为简体汉字的手写体认为是同源 1)仿生模式识别既能够“识”,又能够“别”,对 的:如果手写体汉字中包含了简体和繁体两种字体, 于没有训练过的样本,不会将其错误归为已训练样 “简体”和“繁体”是不同源的,则认为是简体和繁体 本中的某一类,而是能够将其正确拒识,实际应用中 两类事物的归并。后文所提到的同类,若无特别说 误识率非常低: 明,都是指“同源”同类。依据上述“同源”的定义, 2)仿生模式识别可以不断学习新事物(类别), 同类样本之间有如下“同源连续性”规律:
佳分类划分,代表性方法有 Fisher 判别分析[2] 、支撑 向量机(SVM) [3]等。 这些方法解决了很多问题,并 在多个领域得到了成功应用,为科学发展和社会进 步做出了巨大贡献,但这些传统方法也存在一些固 有的缺陷:1)对事物进行学习时通常至少需要两类 才可进行“区分”,例如在人脸检测中,学习的任务 仅是人脸这一个类别,但在训练分类器时,分类器需 要学习“人脸”和“非人脸”两种类型;2)已训练好的 分类器类别之间的最优分类边界是确定的,若要增 加学习新类,则需要重新训练分类器,这将会打乱现 有知识(最优分类边界改变);3)未经训练类别的样 本很容易被误认为是已训练的某一类,分类器不能 有效对其进行正确拒识,这是由于分类边界只是将 一个无限特征空间划分为多个无限空间。 中国科学院半导体研究所王守觉院士通过分析 人类认识事物的特点,提出了一种全新思想的模式 识别方法———仿生模式识别(biomimetic pattern rec⁃ ognition,BPR) [4] 。 仿生模式识别认为,事物具有 “同源连续性规律”,即同类事物的两个不同样本之 间,至少有一个渐变过程,在这个渐变过程中的所有 样本仍属于该类;也可以这样认为:同类样本在特征 空间中是连续分布的,任意两个样本点之间具有某 种连续变化的关系。 “同源连续性规律” 是现实中 人类直观认识世界的普遍存在的规律,同时也是仿 生模式识别方法用于提高对事物的识别能力的“先 验知识”。 引入“同源连续性规律” 后,研究仿生模 式识别如何对某类事物进行学习,就是研究在高维 特征空间中如何对该类样本进行最优连续“覆盖” (即对一类样本的“识”);它不同于传统模式识别方 法侧重于“别”,即如何在高维特征空间中对不同类 样本进行最优“划分”。 可见,在特征空间中对某一 类样本的分布进行最优覆盖是仿生模式识别的首要 目标,覆盖后在特征空间中形成的连续、闭合的复杂 几何形体区域赋予该类的属性;则仿生模式识别的 识别过程就是判断特征空间中待识别样本点是否落 入此几何形体内。 若是,则该样本点属于此几何形 体所代表的类别;否则认为不属于该类。 仿生模式 识别于 2002 年被提出后,被迅速应用到多种识别任 务中,获得了有效的识别结果, 并展现出独特的 优势: 1)仿生模式识别既能够“识”,又能够“别”,对 于没有训练过的样本,不会将其错误归为已训练样 本中的某一类,而是能够将其正确拒识,实际应用中 误识率非常低; 2)仿生模式识别可以不断学习新事物(类别), 并且学习某类时不需要负样本(非此类或他类样 本)参加训练,学习新类时不需要重新学习已知类, 即不会影响原有已经学习好的知识; 3)仿生模式识别在低训练样本数量情况下仍 能获得较高的正确识别率,这得益于引入了“同源 连续性规律“的先验知识,因而有效的信息不再局 限于训练样本。 低训练样本数、高识别率的特点,更 适合一些不易获取大量训练样本的特殊场合下的识 别任务。 仿生模式识别由于其独特的优点,在国内逐渐 受到关注,越来越多的研究机构加入研究队伍,从理 论、方法以及应用等多方面开展研究,这些研究机构 包括中科院半导体研究所、同济大学、中国农业大 学、浙江工业大学、厦门大学、深圳大学、中科院苏州 纳米技术与纳米仿生研究所、长沙理工大学、合肥工 业大学、吉林大学、西安电子科技大学等众多高校和 研究机构。 仿生模式识别的研究成果不断涌现,先 后用于目标识别、生物特征识别、信号处理、医学图 像识别、基因预测和近红外定性分析,涉及机器视 觉、安防、农业、生物医学、通信以及互联网等众多领 域,获得了有益的效果。 2002 年迄今,在国内学术 期刊发表的与仿生模式识别直接相关的论文有 80 余篇,相关的国内硕士和博士学位论文 30 余篇,在 国际期刊和会议上发表的论文 40 篇左右,此外,还 有 3 本专著出版[5⁃7] 。 仿生模式识别是我国自主创新的方法与技术, 从提出至今,已有十多年的发展,但目前还没有对该 技术的全面总结。 本文旨在对仿生模式识别进行全 面的综述。 首先介绍仿生模式识别的基本原理,再 对仿生模式识别的实现方法进行分析和对比研究, 并给出了仿生模式识别在多个应用领域的使用效 果,最后探讨仿生模式识别的未来研究方向,希望能 够为该方法的进一步发展和实际应用提供参考。 1 仿生模式识别的基本原理 1.1 仿生模式识别的基点———“同源连续性”规律 仿生模式识别把同一类事物称为“同源”,这里 所谓的“同一类”是指在源头或原理上是相同的一 类,而不是拼凑或合并而成的同一类。 例如,在手写 体汉字识别中,同为简体汉字的手写体认为是同源 的;如果手写体汉字中包含了简体和繁体两种字体, “简体”和“繁体”是不同源的,则认为是简体和繁体 两类事物的归并。 后文所提到的同类,若无特别说 明,都是指“同源”同类。 依据上述“同源”的定义, 同类样本之间有如下 “同源连续性”规律: ·2· 智 能 系 统 学 报 第 11 卷
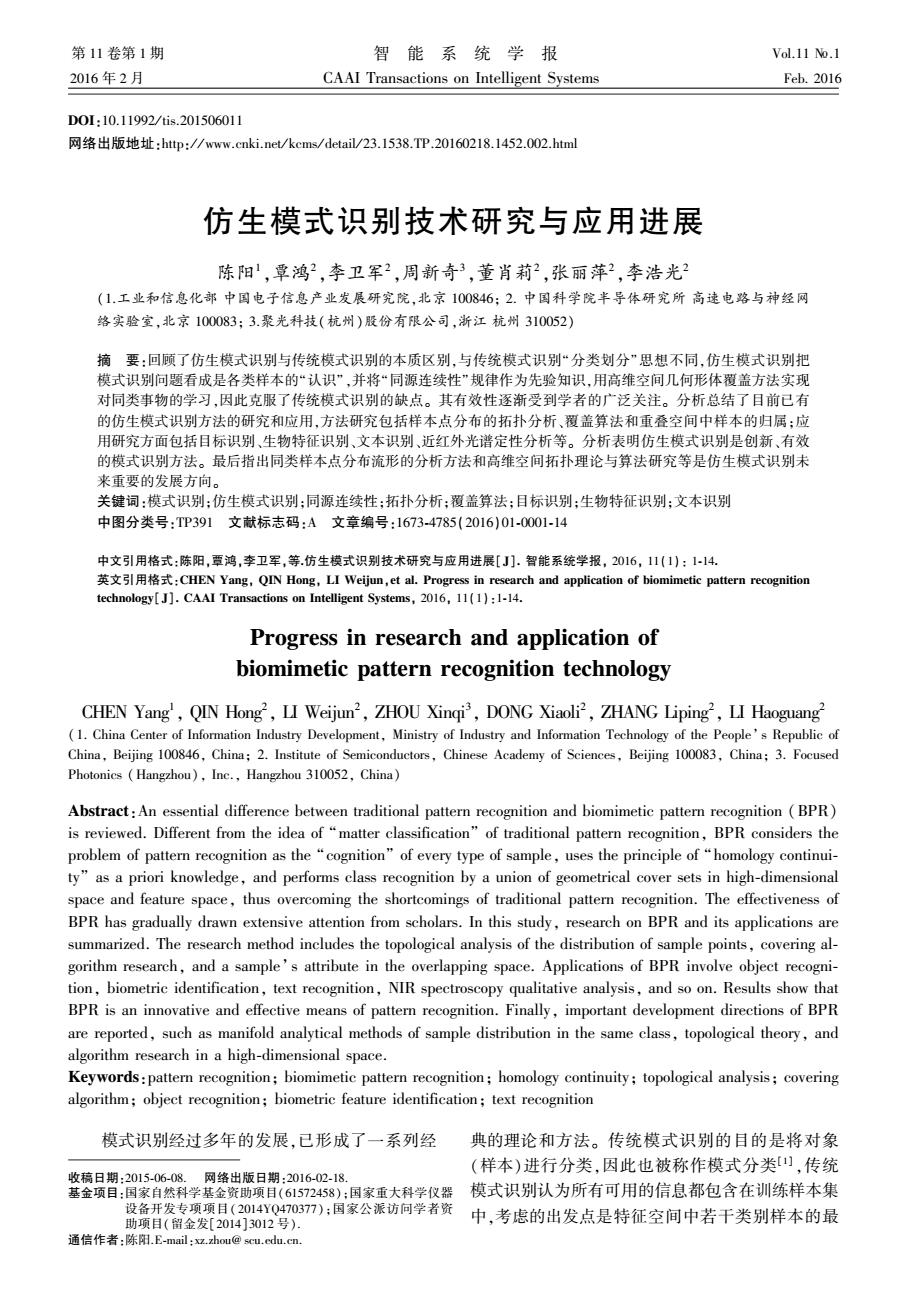
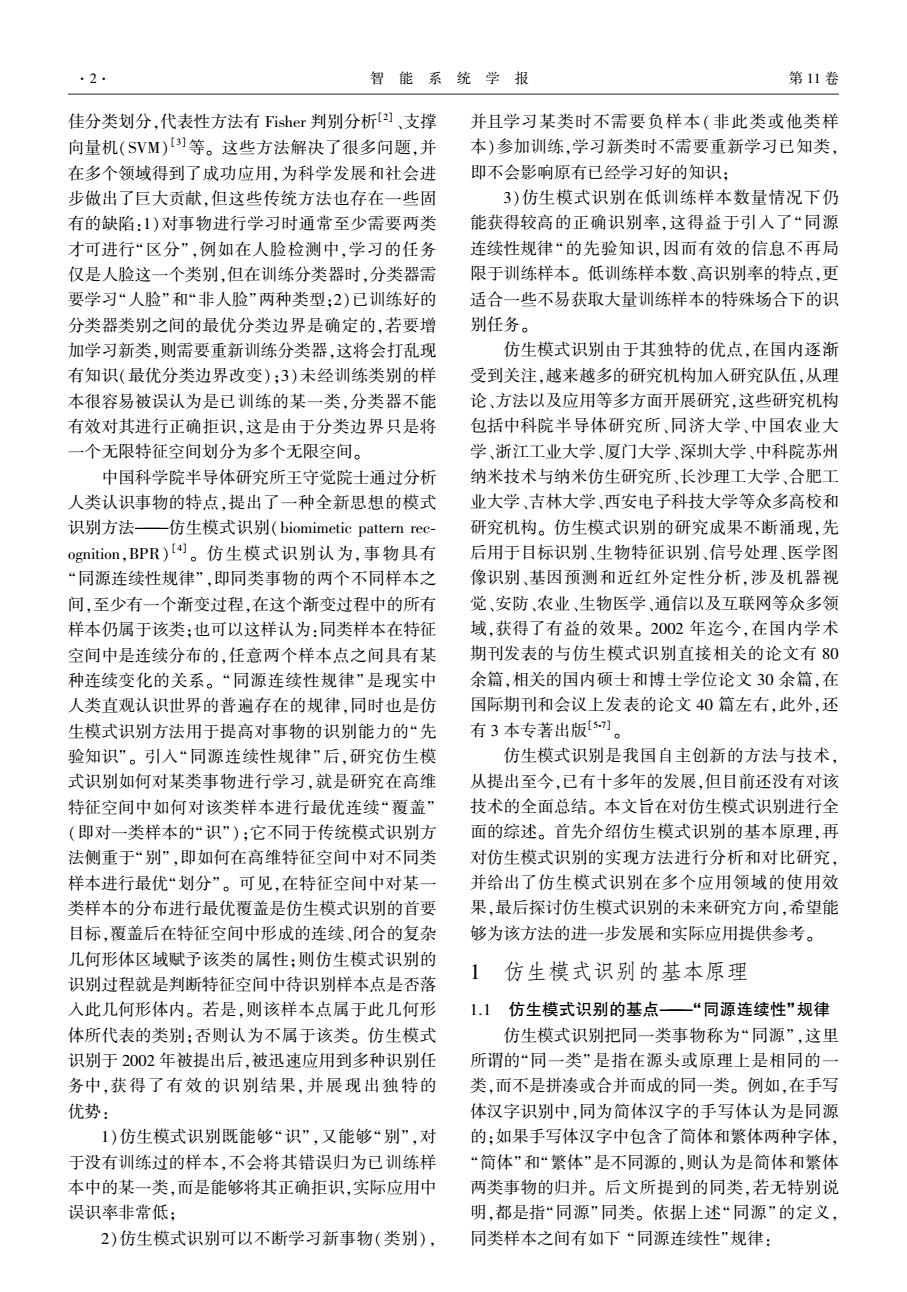
第1期 陈阳,等:仿生模式识别技术研究与应用进展 3 自然界中待认识的事物,若两个事物同类但不 点集(设为集合A)是一个闭合的子空间,这个闭合 完全相等,则可以用一个渐变的或非量子化的过程 的子空间因实际事物的不同,在特征空间中表现为 来描述这两个事物之间的关系,在此变化过程中的 不同维数的“流形”。现实中获取到的样本点往往 所有事物与这两个事物同属一类。“同源连续性” 包含噪声,因而实际应用仿生模式识别时,用特征空 规律可用数学描述为: 间中的集合P。取代集合A;其中x、y是特征空间中 在n维特征空间R”中,假设A为某一同类样本 的点,k为选定的距离常数。因而,仿生模式识别的 (事物)全体的集合,如果样本x,yCA,则对于任意 识别过程就是判断特征空间R”中表示“被识别事 E>0,必定存在一个集合B满足如下条件: 物”的点(未知样本点)是否属于集合P。,其中 x,x2,3x=x,x=y,lE N,) B= CA (p(xm,xm+1)<e,1≤m≤l-1 P.出P,P表示第i个简单几何形体。仿生模 式识别的识别过程在二维特征空间中的示意图如图 式中p(x。,x1)表示样本x.与x1间的距离。 2所示,在二维特征空间R中,假设A事物样本点的 1.2仿生模式识别的学习过程 全体为空间A(现实中A无法确定),少12为训练样 基于1.1节的“同源连续性”规律,两个同类样 本,采用圆形作为覆盖单元,k为距离常数,则分别 本间存在连续渐变的关系,并且位于这个渐变过程 以y1y2为圆心、k为半径的两个圆所代表的集合 中的样本点仍属于同一类。仿生模式识别的目标就 P1、P2的并构成集合P.(图2中阴影区域)。识别 是把分布在特征空间中的同类样本实现连续覆盖, 过程即是判断特征空间中的未知样本点:是否属于 以二维空间的情况示意图如图1所示。 集合P。若是,则该样本点属于A类;若否,则不属 于A类。 图1仿生模式识别覆盖示意图 图2识别过程示意图 Fig.1 The Schematic Diagram of BPR Fig.2 The Schematic Diagram of recognition 图1中,三角形、十字形、圆点表示分别表示三 类不同样本,椭圆表示仿生模式识别采用某种覆盖 综上所述,仿生模式识别与传统模式识别的差 方法在特征空间内形成类别子空间的“认识”方式。 别可归纳如表1所示。 也就是说,仿生模式识别的学习过程,就是特征空间 中对同类样本点进行连续覆盖的过程,不同的覆盖 表1仿生模式识别与传统模式识别的差别 算法构成了仿生模式识别的学习算法。 Table 1 Difference Between BPR and TPR 通常,特征空间R”是n≥3的高维特征空间,某 传统模式识别 仿生模式识别 类事物样本分布子空间在这样的高维空间中是非常 基本出发点 多类样本的区分 一类类样本的认识 复杂的,实际设计学习算法时,将类别子空间分解为 多个封闭的简单几何形体空间(如图1三角形类所 所有可用的信息都包 示,类别空间被分解成多个首尾相接的椭圆),则用 理论基础 同源连续性规律 含在训练集中 这些简单几何形体的并近似原来的类别子空间,可 使仿生模式识别的学习算法灵活、高效。 数学工具 统计学 拓扑学 1.3仿生模式识别的识别过程 高维空间的复杂几何 对于仿生模式识别而言,某一类事物的全体样 学习方法 高维空间的空间划分 形体覆盖 本点在特征空间中的连续映射的“像”所构成的
自然界中待认识的事物,若两个事物同类但不 完全相等,则可以用一个渐变的或非量子化的过程 来描述这两个事物之间的关系,在此变化过程中的 所有事物与这两个事物同属一类。 “同源连续性” 规律可用数学描述为: 在 n 维特征空间 R n 中,假设 A 为某一同类样本 (事物)全体的集合,如果样本 x,y⊂A,则对于任意 ε>0, 必定存在一个集合 B 满足如下条件: B = x1 ,x2 ,x3…,xl x1 = x,xl = y,l ∈ N, ρ(xm ,x { m+1 ) < ε,1 ≤ m ≤ l - 1 } ⊂ A 式中 ρ(xm ,xm+1 )表示样本 xm 与 xm+1间的距离。 1.2 仿生模式识别的学习过程 基于 1.1 节的“同源连续性”规律,两个同类样 本间存在连续渐变的关系,并且位于这个渐变过程 中的样本点仍属于同一类。 仿生模式识别的目标就 是把分布在特征空间中的同类样本实现连续覆盖, 以二维空间的情况示意图如图 1 所示。 图 1 仿生模式识别覆盖示意图 Fig.1 The Schematic Diagram of BPR 图 1 中,三角形、十字形、圆点表示分别表示三 类不同样本,椭圆表示仿生模式识别采用某种覆盖 方法在特征空间内形成类别子空间的“认识”方式。 也就是说,仿生模式识别的学习过程,就是特征空间 中对同类样本点进行连续覆盖的过程,不同的覆盖 算法构成了仿生模式识别的学习算法。 通常,特征空间 R n 是 n≥3 的高维特征空间,某 类事物样本分布子空间在这样的高维空间中是非常 复杂的,实际设计学习算法时,将类别子空间分解为 多个封闭的简单几何形体空间(如图 1 三角形类所 示,类别空间被分解成多个首尾相接的椭圆),则用 这些简单几何形体的并近似原来的类别子空间,可 使仿生模式识别的学习算法灵活、高效。 1.3 仿生模式识别的识别过程 对于仿生模式识别而言,某一类事物的全体样 本点在特征空间 R n 中的连续映射的“像”所构成的 点集(设为集合 A)是一个闭合的子空间,这个闭合 的子空间因实际事物的不同,在特征空间中表现为 不同维数的“流形”。 现实中获取到的样本点往往 包含噪声,因而实际应用仿生模式识别时,用特征空 间中的集合 Pa 取代集合 A;其中 x、y 是特征空间中 的点,k 为选定的距离常数。 因而,仿生模式识别的 识别过程就是判断特征空间 R n 中表示“被识别事 物”的点 ( 未知样本点) 是否属于集合 Pa , 其中 Pa =∪ n i = 1 Pai, Pai 表示第 i 个简单几何形体。 仿生模 式识别的识别过程在二维特征空间中的示意图如图 2 所示,在二维特征空间 R 2中,假设 A 事物样本点的 全体为空间 A(现实中 A 无法确定),y1 、y2 为训练样 本,采用圆形作为覆盖单元,k 为距离常数,则分别 以 y1 、y2 为圆心、k 为半径的两个圆所代表的集合 Pa1 、Pa2的并构成集合 Pa(图 2 中阴影区域)。 识别 过程即是判断特征空间中的未知样本点 z 是否属于 集合 Pa 。 若是,则该样本点属于 A 类;若否,则不属 于 A 类。 图 2 识别过程示意图 Fig.2 The Schematic Diagram of recognition 综上所述,仿生模式识别与传统模式识别的差 别可归纳如表 1 所示。 表 1 仿生模式识别与传统模式识别的差别 Table 1 Difference Between BPR and TPR 传统模式识别 仿生模式识别 基本出发点 多类样本的区分 一类类样本的认识 理论基础 所有可用的信息都包 含在训练集中 同源连续性规律 数学工具 统计学 拓扑学 学习方法 高维空间的空间划分 高维空间的复杂几何 形体覆盖 第 1 期 陈阳,等:仿生模式识别技术研究与应用进展 ·3·
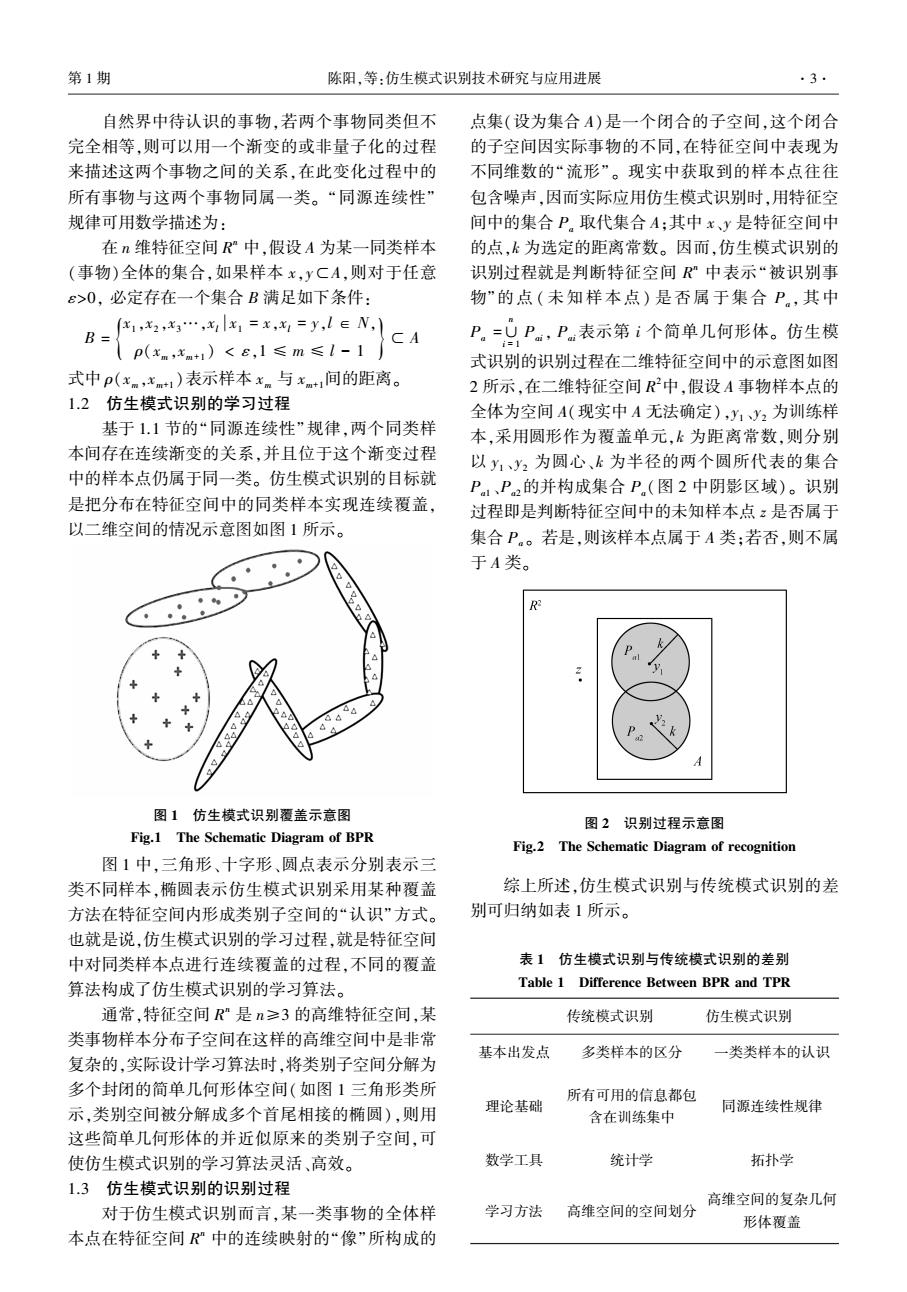
智能系统学报 第11卷 2 方法研究 决问题的能力。 2.1样本点分布的拓扑分析 仿生模式识别的一般流程如图3所示。 仿生模式识别的核心是覆盖,而分析类别空间 的流形是确定用何种覆盖方法的前提。样本点分布 分析训 样本预 在特征空 类别属性 训练样本 练样本 处理及 的拓扑属性简单分为两种情况,一种情况是拓扑结 间中,采 子空间 点分布 特征提 用复杂几 构是已知的或可以预测的:另一种情况是拓扑结构 的拓扑 取 何形体连 流形 续覆盖同 是未知的。例如在采集训练样本时,设定严格的采 类样本 集条件,按照一定的规律或顺序采集,此时,样本点 (a)学习过程 分布的拓扑结构是已知的或者是可以估计的。王守 未知样本 样本预 样本点 处理及 与类别 特征提 识别结果 觉在目标识别应用中[,采用了特定的样本采集方 取 式:摄像头在同一水平面上采集目标的0~360°方向 类别属性子空间 的图像,此时目标方向的改变只有一个变量,可认为 (b)识别过程 目标全体样本在特征空间中的分布近似呈环状的一 图3仿生模式识别的一般流程 维流形。王宪保等)的双螺旋曲线识别任务,识别 Fig.3 Flow chart of BPR 目标—双螺旋曲线是分布在二维空间的一维流 仿生模式识别为模式识别技术的发展开辟了一 形。王守觉、徐健等在一项人脸身份确认研究 条新路径,同时也提出了实现仿生模式识别需要研 中,使用三个摄像头组成一组镜头,这一组镜头同时 究的多方面问题,目前的研究主要集中在如下几,点: 采集同一人脸的图像得到多个样本点,这多个样本 1)类别子空间的拓扑流形分析:仿生模式识别 点的分布状况部分反映了该人脸在特征空间中的分 是一类一类地“认识”事物,在学习某类事物时,需 布状况,后续用一个多权值神经元对这一组样本进 要先分析该类训练样本点的分布,依据同类样本点 行覆盖完成学习。在高维空间中,遇到更多的是拓 在特征空间中的分布特性,确定这种分布具有何种 扑结构未知的情况,目前还没有有效分析高维空间 拓扑属性,从而确定类别子空间在特征空间中的流 中点分布状况的系统方法和工具,并且流形的维数 形。在确定类别空间的流形及其维数后,仿生模式 越高,分析的难度越大,目前的研究大多假定样本呈 识别再考虑用何种覆盖方法。 一维流形分布4,四),在这些实验中,采用一维流形 2)覆盖方法研究:研究发现,同一类样本在高 覆盖,都能够取得很好的识别效果。王宪保等1]研 维特征空间中的分布表现为一个非常复杂的几何形 究了不限定流形维数的仿生模式识别实现方法,研 体,虽然具有一定的拓扑流形属性,但要实现对这个 究发现随着覆盖维数的增加,样本的识别率也逐渐 几何形体的覆盖会遇到很多困难,例如选择何种几 提高,但提高幅度逐渐变小。 何覆盖单元、如何确定覆盖的顺序、怎样进行连续覆 2.2覆盖算法研究 盖等,这也就成为仿生模式识别研究的热点。 覆盖算法的实现是仿生模式识别的研究重点, 3)识别方法研究:在确定使用哪种覆盖方法 神经网络被证明是有效的方法[.)。Wang Shou- 后,识别通常会比较简单,只需计算待识别样本点是 jue,Zhao Xingtao等1.l6提出一种超香肠神经网 否落入特征空间中表征某一类的几何形体内。若 络,网络由超香肠神经元(hyper sausage neuron, 是,则将样本点识别为该类:若否,则认为不属于该 HSN)构成,HSN在特征空间中可看成是以两个样 类。理论上,不同类事物在特征空间的覆盖形体不 本点的连线作为中心线,与中心线距离小于阈值的 会交叉重叠,因此,决不会出现误识。然而,在工程 所有点的集合。在3维空间中,神经元可看成是一 应用实践中,所采集到的训练样本及待识别样本中 个以两个样本点之间的线段作为中线的圆柱体、分 往往包含不同程度的“噪声”,特征提取过程中也会 别以两个样本点为球心的半个超球共3个区域的 丢失一些信息,最终有可能导致类别空间重叠,需要 并,构成一个新的空间区域,因其在3维空间中像一 解决处于重叠空间中的未知样本的归属问题。 根香肠,称之为超香肠神经元。王守觉、徐健、Lai 除上述几个主要研究方向,也有学者将仿生模 Jiangliang等9,川还提出了业函数神经网络:业函数 式识别思想与其他方法相结合,从而提高该方法解 神经网络由多权值神经元组成,而多权值神经元的
2 方法研究 仿生模式识别的一般流程如图 3 所示。 图 3 仿生模式识别的一般流程 Fig.3 Flow chart of BPR 仿生模式识别为模式识别技术的发展开辟了一 条新路径,同时也提出了实现仿生模式识别需要研 究的多方面问题,目前的研究主要集中在如下几点: 1)类别子空间的拓扑流形分析:仿生模式识别 是一类一类地“认识”事物,在学习某类事物时,需 要先分析该类训练样本点的分布,依据同类样本点 在特征空间中的分布特性,确定这种分布具有何种 拓扑属性,从而确定类别子空间在特征空间中的流 形。 在确定类别空间的流形及其维数后,仿生模式 识别再考虑用何种覆盖方法。 2)覆盖方法研究:研究发现,同一类样本在高 维特征空间中的分布表现为一个非常复杂的几何形 体,虽然具有一定的拓扑流形属性,但要实现对这个 几何形体的覆盖会遇到很多困难,例如选择何种几 何覆盖单元、如何确定覆盖的顺序、怎样进行连续覆 盖等,这也就成为仿生模式识别研究的热点。 3)识别方法研究:在确定使用哪种覆盖方法 后,识别通常会比较简单,只需计算待识别样本点是 否落入特征空间中表征某一类的几何形体内。 若 是,则将样本点识别为该类;若否,则认为不属于该 类。 理论上,不同类事物在特征空间的覆盖形体不 会交叉重叠,因此,决不会出现误识。 然而,在工程 应用实践中,所采集到的训练样本及待识别样本中 往往包含不同程度的“噪声”,特征提取过程中也会 丢失一些信息,最终有可能导致类别空间重叠,需要 解决处于重叠空间中的未知样本的归属问题。 除上述几个主要研究方向,也有学者将仿生模 式识别思想与其他方法相结合,从而提高该方法解 决问题的能力。 2.1 样本点分布的拓扑分析 仿生模式识别的核心是覆盖,而分析类别空间 的流形是确定用何种覆盖方法的前提。 样本点分布 的拓扑属性简单分为两种情况,一种情况是拓扑结 构是已知的或可以预测的;另一种情况是拓扑结构 是未知的。 例如在采集训练样本时,设定严格的采 集条件,按照一定的规律或顺序采集,此时,样本点 分布的拓扑结构是已知的或者是可以估计的。 王守 觉在目标识别应用中[4] ,采用了特定的样本采集方 式:摄像头在同一水平面上采集目标的 0~360°方向 的图像,此时目标方向的改变只有一个变量,可认为 目标全体样本在特征空间中的分布近似呈环状的一 维流形。 王宪保等[8]的双螺旋曲线识别任务,识别 目标———双螺旋曲线是分布在二维空间的一维流 形。 王守觉、徐健等[9] 在一项人脸身份确认研究 中,使用三个摄像头组成一组镜头,这一组镜头同时 采集同一人脸的图像得到多个样本点,这多个样本 点的分布状况部分反映了该人脸在特征空间中的分 布状况,后续用一个多权值神经元对这一组样本进 行覆盖完成学习。 在高维空间中,遇到更多的是拓 扑结构未知的情况,目前还没有有效分析高维空间 中点分布状况的系统方法和工具,并且流形的维数 越高,分析的难度越大,目前的研究大多假定样本呈 一维流形分布[4,10⁃12] ,在这些实验中,采用一维流形 覆盖,都能够取得很好的识别效果。 王宪保等[13] 研 究了不限定流形维数的仿生模式识别实现方法,研 究发现随着覆盖维数的增加,样本的识别率也逐渐 提高,但提高幅度逐渐变小。 2.2 覆盖算法研究 覆盖算法的实现是仿生模式识别的研究重点, 神经网络被证明是有效的方法[14⁃15] 。 Wang Shou⁃ jue, Zhao Xingtao 等[11,16] 提出一种超香肠神经网 络,网络由超香肠神经元 ( hyper sausage neuron, HSN)构成,HSN 在特征空间中可看成是以两个样 本点的连线作为中心线,与中心线距离小于阈值的 所有点的集合。 在 3 维空间中,神经元可看成是一 个以两个样本点之间的线段作为中线的圆柱体、分 别以两个样本点为球心的半个超球共 3 个区域的 并,构成一个新的空间区域,因其在 3 维空间中像一 根香肠,称之为超香肠神经元。 王守觉、徐健、Lai Jiangliang 等[9,17]还提出了 Ψ 函数神经网络:Ψ 函数 神经网络由多权值神经元组成,而多权值神经元的 ·4· 智 能 系 统 学 报 第 11 卷
第1期 陈阳,等:仿生模式识别技术研究与应用进展 5 权值通过样本来确定,一个多权值神经元在特征空 是一个神经元,而多个几何体的并或交可看成是多 间中形成的覆盖区域是依据多个权值矢量共同作用 个神经元构成的神经网络。从这个意义上看,神经 形成的复杂几何形体。因此,多权值神经元覆盖的 网络方法和高维形象几何方法是相通的。杨国为 空间状况是由样本决定的。以三权值神经网络进行 等]采用高维空间点分布分析方法,给出从数学上 人脸身份确认,在误识率为0的情况下,正确识别率 证明了找到满意的几何覆盖形体的方法。王宪保 达到96%,实验结果也显示,增加网络规模可提高 等[]运用高维空间几何理论和流形学习理论,在不 识别效果。多权值神经元网络用在非特定人语音识 需要限定流形维数的情况下,研究了具体实现训练 别中1],每个词汇的训练样本数量为30个的情况 样本的覆盖方法及测试样本的识别方法,并对覆盖 下,已训练词汇的误识率仅为1.48%,未训练词汇的 维数以及与识别性能之间的关系进行了分析:并将 误识率为13.29%,而同条件下HMM方法的误识率 该实现方法应用在语音识别中,取得比传统的HMM 为89.24%,远高于仿生模式识别方法。王宪保等[】 和最近邻法(零维覆盖)都要高的识别率。实验还 使用了两种不同结构的神经元来构造一个三层神经 表明,提出的方法对未学习人的语音样本的正确识 网络,该网络可实现一维流形覆盖:由于网络的参数 别率提高更显著:随着覆盖维数的增加,样本的识别 是根据样本直接计算得到,网络不存在迭代时间及 率也逐渐提高,但提高幅度逐渐变小:由于点到覆盖 收敛性问题:网络的规模也是由样本数量决定的,不 体距离的计算是个递归的过程,随着维数的增加,计 存在隐层节点数选择难题。邱立达等19)将改进蚁 算量呈级数的增长,综合考虑识别率和识别时间,本 群算法引入仿生模式识别的神经网络构造当中,并 文认为二维覆盖是合适的选择。另外,Cao Wenming 选取超球作为覆盖几何体。该算法通过设计目标函 等6,2]系统研究了仿生模式识别的几何代数方法, 数、转移概率公式以及信息素更新算法等方法,算出 还研究了多光谱图像的仿生模式识别理论和方 神经网络中覆盖几何体的最优参数:算法还引入调 法25.26 节因子α:α越大,单个神经元的体积越小、神经元 2.3重叠空间中样本的归属判别 数量越多,算法构造的网络的复杂度也就越高、识别 武妍等[列研究发现实际情况中,仿生模式识别 率越高:反之,α越小,单个神经元的体积越大、神经 为了提高识别率而增大阈值或训练样本增加时,不 元数量越少,算法构造的网络的复杂度也就越低,识 可避免地出现空间重叠。为了解决处于重叠空间中 别率越低。在实际应用中可通过调整α的取值来 的未知样本的归属问题,文献提出了适当增大阈值 平衡网络的性能和复杂度,以满足不同需要。胡静 以及允许大样本情况下的空间重叠,在出现空间重 等[20]基于神经网络模块化编程思想,提出了一种实 叠的情况下,采用相对子空间划分的决策方法(rela- 现仿生模式识别的三层前向神经网络结构设计准 tive division of overlapping space based biomimetic 则,即:采用单隐节点层结构,网络的输入层与隐节 pattern recognition,RDBPR),即通过计算重叠空间 点层的连接方式为全连接,将隐节点层划分为C个 中样本到各个特征子空间的距离,得到距离相对最 子节点组,且各个子节点组只与其相应的输出层节 小的类别并将其归类。RDBPR方法能够在不增加 点相连接。其中C为学习样本的“基元素”数目,实 误识率的基础上,提高对处于重叠空间中样本的识 验比较了严格按照该准则设计的网络与未按照该准 别能力,从而提高最终识别率。文献的实验结果表 则设计的网络在交通标识符形状识别中的效果,隐 明,在训练样本数量较少的情况下,即空间覆盖的几 节点分组时,网络收敛次数更多、识别率更高且训练 何形体体积较小时,与BPR(biomimetic pattern rec- 时间更少,识别速度更快。其他神经覆盖方法研 ognition)相比,RDBPR未显示出明显的优势;但随 究2]提出的类高斯混合模型的神经元覆盖方法,王 着训练样本数量增加,在保持较高的稳定性和不显 改良等]利用动态聚类的方法寻找到每个覆盖区 著增加误识率的前提下,RDBPR比BPR的识别率 中心,然后用多权值神经元进行覆盖等。 更优。丁杰等]给出了通过计算基于类条件的后 从高维形象几何的观点出发,研究采用多个简 验概率对样本进行相对区别的判别规则,依据待识 单几何体进行局部覆盖,再通过对简单几何体合并 别样本与各类别子空间的相对距离做置信评估,根 或相交的方法,可实现对复杂几何体的覆盖。实际 据各类模式散布计算后验概率,实现因空间重叠造 上,从广义神经网络的角度看,简单几何体可以看成 成拒识的样本的相对划分,提高识别率
权值通过样本来确定,一个多权值神经元在特征空 间中形成的覆盖区域是依据多个权值矢量共同作用 形成的复杂几何形体。 因此,多权值神经元覆盖的 空间状况是由样本决定的。 以三权值神经网络进行 人脸身份确认,在误识率为 0 的情况下,正确识别率 达到 96%,实验结果也显示,增加网络规模可提高 识别效果。 多权值神经元网络用在非特定人语音识 别中[18] ,每个词汇的训练样本数量为 30 个的情况 下,已训练词汇的误识率仅为 1.48%,未训练词汇的 误识率为 13.29%,而同条件下 HMM 方法的误识率 为89.24%,远高于仿生模式识别方法。 王宪保等[8] 使用了两种不同结构的神经元来构造一个三层神经 网络,该网络可实现一维流形覆盖;由于网络的参数 是根据样本直接计算得到,网络不存在迭代时间及 收敛性问题;网络的规模也是由样本数量决定的,不 存在隐层节点数选择难题。 邱立达等[19] 将改进蚁 群算法引入仿生模式识别的神经网络构造当中,并 选取超球作为覆盖几何体。 该算法通过设计目标函 数、转移概率公式以及信息素更新算法等方法,算出 神经网络中覆盖几何体的最优参数;算法还引入调 节因子 α:α 越大,单个神经元的体积越小、神经元 数量越多,算法构造的网络的复杂度也就越高、识别 率越高;反之,α 越小,单个神经元的体积越大、神经 元数量越少,算法构造的网络的复杂度也就越低,识 别率越低。 在实际应用中可通过调整 α 的取值来 平衡网络的性能和复杂度,以满足不同需要。 胡静 等[20]基于神经网络模块化编程思想,提出了一种实 现仿生模式识别的三层前向神经网络结构设计准 则,即:采用单隐节点层结构,网络的输入层与隐节 点层的连接方式为全连接,将隐节点层划分为 C 个 子节点组,且各个子节点组只与其相应的输出层节 点相连接。 其中 C 为学习样本的“基元素”数目,实 验比较了严格按照该准则设计的网络与未按照该准 则设计的网络在交通标识符形状识别中的效果,隐 节点分组时,网络收敛次数更多、识别率更高且训练 时间更少,识别速度更快。 其他神经覆盖方法研 究[21]提出的类高斯混合模型的神经元覆盖方法,王 改良等[22]利用动态聚类的方法寻找到每个覆盖区 中心,然后用多权值神经元进行覆盖等。 从高维形象几何的观点出发,研究采用多个简 单几何体进行局部覆盖,再通过对简单几何体合并 或相交的方法,可实现对复杂几何体的覆盖。 实际 上,从广义神经网络的角度看,简单几何体可以看成 是一个神经元,而多个几何体的并或交可看成是多 个神经元构成的神经网络。 从这个意义上看,神经 网络方法和高维形象几何方法是相通的。 杨国为 等[23]采用高维空间点分布分析方法,给出从数学上 证明了找到满意的几何覆盖形体的方法。 王宪保 等[13]运用高维空间几何理论和流形学习理论,在不 需要限定流形维数的情况下,研究了具体实现训练 样本的覆盖方法及测试样本的识别方法,并对覆盖 维数以及与识别性能之间的关系进行了分析;并将 该实现方法应用在语音识别中,取得比传统的 HMM 和最近邻法(零维覆盖)都要高的识别率。 实验还 表明,提出的方法对未学习人的语音样本的正确识 别率提高更显著;随着覆盖维数的增加,样本的识别 率也逐渐提高,但提高幅度逐渐变小;由于点到覆盖 体距离的计算是个递归的过程,随着维数的增加,计 算量呈级数的增长,综合考虑识别率和识别时间,本 文认为二维覆盖是合适的选择。 另外,Cao Wenming 等[6,24]系统研究了仿生模式识别的几何代数方法, 还研究了多光谱图像的仿生模式识别理论和方 法[25⁃26] 。 2.3 重叠空间中样本的归属判别 武妍等[27]研究发现实际情况中,仿生模式识别 为了提高识别率而增大阈值或训练样本增加时,不 可避免地出现空间重叠。 为了解决处于重叠空间中 的未知样本的归属问题,文献提出了适当增大阈值 以及允许大样本情况下的空间重叠,在出现空间重 叠的情况下,采用相对子空间划分的决策方法(rela⁃ tive division of overlapping space based biomimetic pattern recognition,RDBPR),即通过计算重叠空间 中样本到各个特征子空间的距离,得到距离相对最 小的类别并将其归类。 RDBPR 方法能够在不增加 误识率的基础上,提高对处于重叠空间中样本的识 别能力,从而提高最终识别率。 文献的实验结果表 明,在训练样本数量较少的情况下,即空间覆盖的几 何形体体积较小时,与 BPR( biomimetic pattern rec⁃ ognition)相比,RDBPR 未显示出明显的优势;但随 着训练样本数量增加,在保持较高的稳定性和不显 著增加误识率的前提下,RDBPR 比 BPR 的识别率 更优。 丁杰等[28] 给出了通过计算基于类条件的后 验概率对样本进行相对区别的判别规则,依据待识 别样本与各类别子空间的相对距离做置信评估,根 据各类模式散布计算后验概率,实现因空间重叠造 成拒识的样本的相对划分,提高识别率。 第 1 期 陈阳,等:仿生模式识别技术研究与应用进展 ·5·