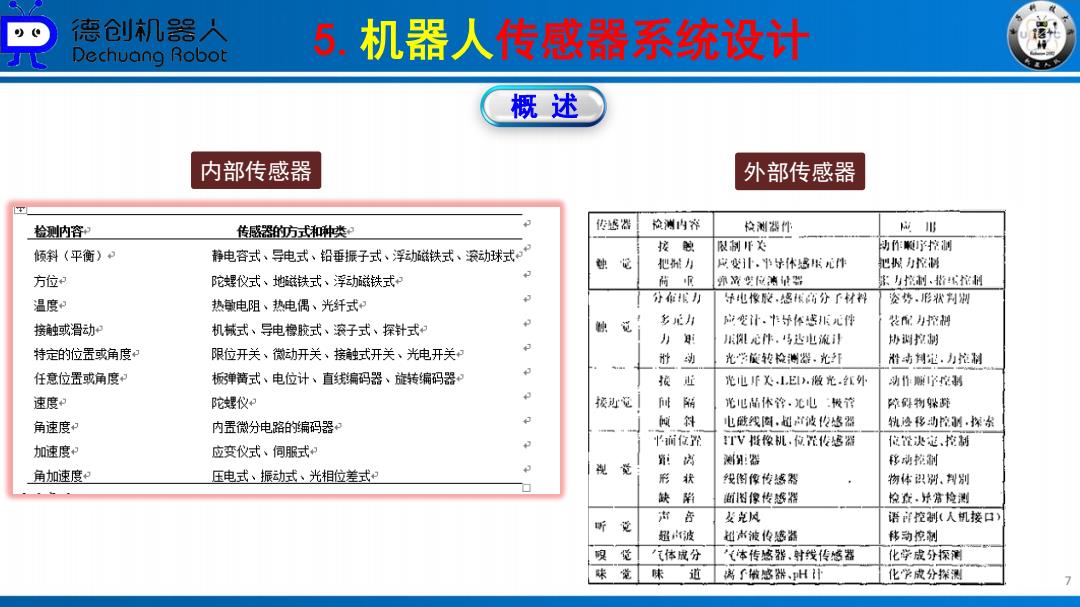
德仓创机器人 Dechuang Robot 5.机器人传感器系统设计 概述 内部传感器 外部传感器 检测内容 传感2器的方式和种类 传述器 检渊内溶 检测器州 应B 倾斜(平衡) 静电容式、导电式、铅垂振子式、浮动磁铁式、滚动球式? 接触 限制并关 幼作颗子护制 把洲力 反变]非.半子体8压元件 把城力控制 方位: 陀螺仪式、地磁铁式、浮动磁铁式 荷眼 筇济变形请量智 紧控制,指控相 温度 热敏电阻、热电偶、光纤式 分佩然小 绿电像股,怒依的分了材料 姿势.形状判测 接触或滑动 机械式、导电橡胶式、滚子式、探针式 貌 多龙力 变计.卡桥体感压儿件 装配身控抽 力则 心件,号逃地流 协测拉制 特定的位置或角度: 限位开关、微动开关、接式开关、光电开关 种动 光学使转检湖器.光轩 沿动判定.力控制 任意位置或角度? 板弹簧式、电位计、直线编码器、旋转编码器 接正 光电f关lE).微光.红外 动作侧的序制 速度 陀螺仪 接再范 间酷 光吧备休常,北电税常 碎得物躲断 角速度 内置微分电路的编码器 间斜 电戳线圈,超波收感器 轨海移均腔钢,探 平间位罪 TV橙豫机,位,花传适器 位登决逆,控制 加速度和 应变仪式、伺服式 :岗 测器 移动轮制 角加速度 压电式、振动试、光相位差式和 视觉 形状 线图像传撼器 物体识别.判别 缺鞘 图像传越器 惊宜,并常检测 听 声音 父克风 语控制(人机接口 觉 超波 超声液传感海 移动惊制 嗅觉 气体成分 '气本传燃器,射线传婚器 化学成分探调 味觉 味 道 满了感器州开 化学成分探测
5.机器人传感器系统设计 7 概 述 内部传感器 外部传感器
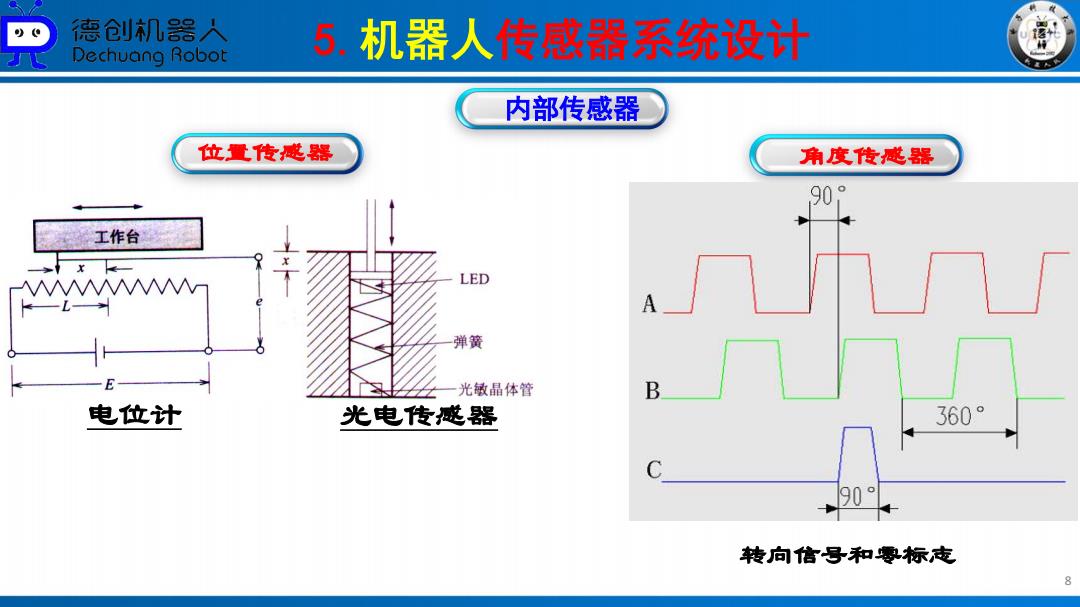
德仓创机器人 Dechuang Robot 5.机器人传感器系统设计 内部传感器 位置传感器 角度传感器 90 工作台 LED 弹簧 光敏晶体管 B 电位计 光电传感器 360 90 转向信号和零标志
5.机器人传感器系统设计 8 内部传感器 位置传感器 电位计 光电传感器 角度传感器 绝对编码器 增量编码器 转向信号和零标志