第七 堂 公 RZ40VMM 位移 Displacement method
第 十 一 章 位 移 法 Displacement method
§11-1位移法的基本概念 位移法的提出 从理论上讲,用力法可以分析各种(所 有)超静定结构。困难是当未知量较多时,力 法方程不易求解。这个困难对于计算工具落后 (无电子计算机)的年代,是一个很难解决的 问题 20世纪初,在力法的基础上提出了位移 法,位移法最主要的研究对象是高次超静定刚 架(多层多跨刚架)
§11-1 位移法的基本概念 一、位移法的提出 从理论上讲,用力法可以分析各种(所 有)超静定结构。困难是当未知量较多时,力 法方程不易求解。这个困难对于计算工具落后 (无电子计算机)的年代,是一个很难解决的 问题。 20世纪初,在力法的基础上提出了位移 法,位移法最主要的研究对象是高次超静定刚 架(多层多跨刚架)
基本设想:几何不变体系在一定外因荷载 支移、温改等)作用下,内力(反力)与变形之间 恒有一定关系。 Fp 0c 对应 确定的内力 确定的位移 位移法:先确定结构的某些结点位移, 再据此 确定其内力。基本未知量为结点位移
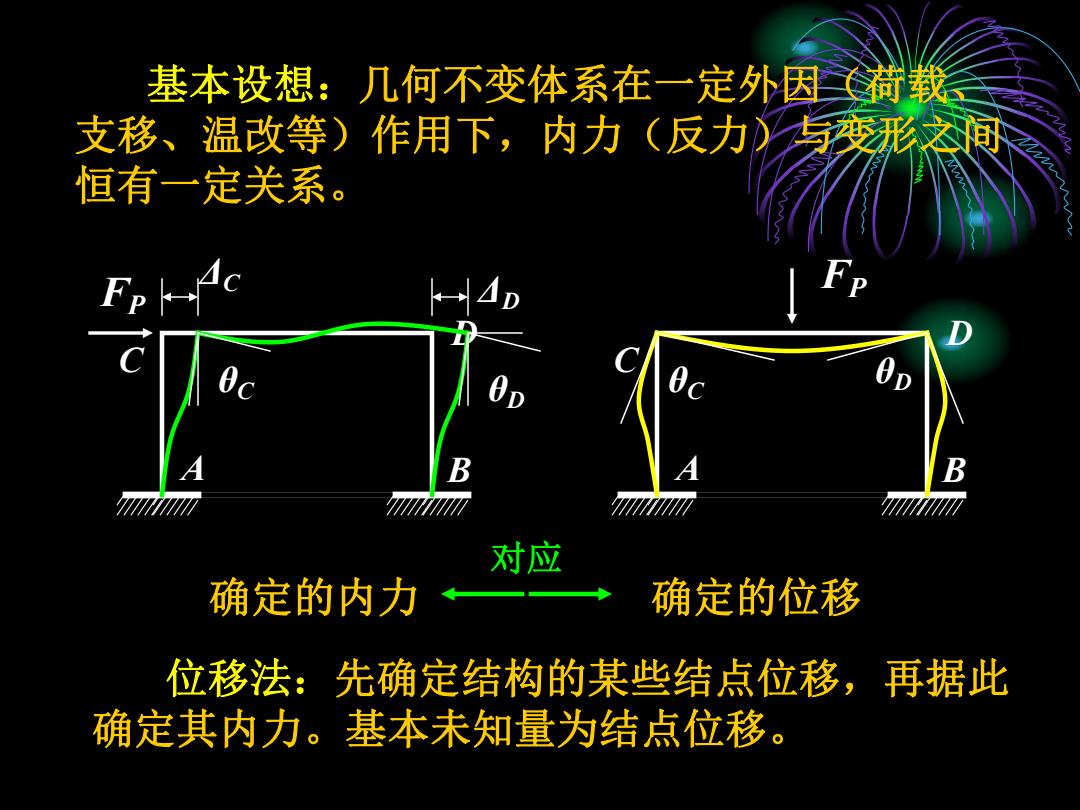
基本设想:几何不变体系在一定外因(荷载、 支移、温改等)作用下,内力(反力)与变形之间 恒有一定关系。 D A B C FP D A B C FP ΔC θC θD ΔD θC θD 确定的内力 确定的位移 对应 位移法:先确定结构的某些结点位移,再据此 确定其内力。基本未知量为结点位移

二、基本思路 B 06 MBA E=常数 ∑MB-0 MBA+M BC=0 I/2 I/2 2EI B 4E7 4E1 08 B 8
B C 二、基本思路 EI=常数 FP l/2 l/2 l C A B A B θB 3 BA B EI M l FP C B C B FP 8 F l P 8 F l P 4 B EI l 2 B EI l = + θB θB θB 4 8 P BC B EI F l M l B MBA MBC ∑MB=0 MBA+M BC =0
分析上图所示刚架 刚架在荷载作用下,发生黄线所示变 形。 其中,固端C,无任何位移; 铰支端A, 无线位移,只有铰位移;结点B,为刚结点 连接B结点的两杆杆端有相同的转角0B,忽 略轴向变形,认为无线位移。 讨论:如何确定每根杆件的内力? AB杆:可视为一端铰支,一端刚结的梁, 在B端发生杆端转角0B 杆端弯矩:Mg4=3EI0BI (a (杆端弯矩对杆端顺时针为正)
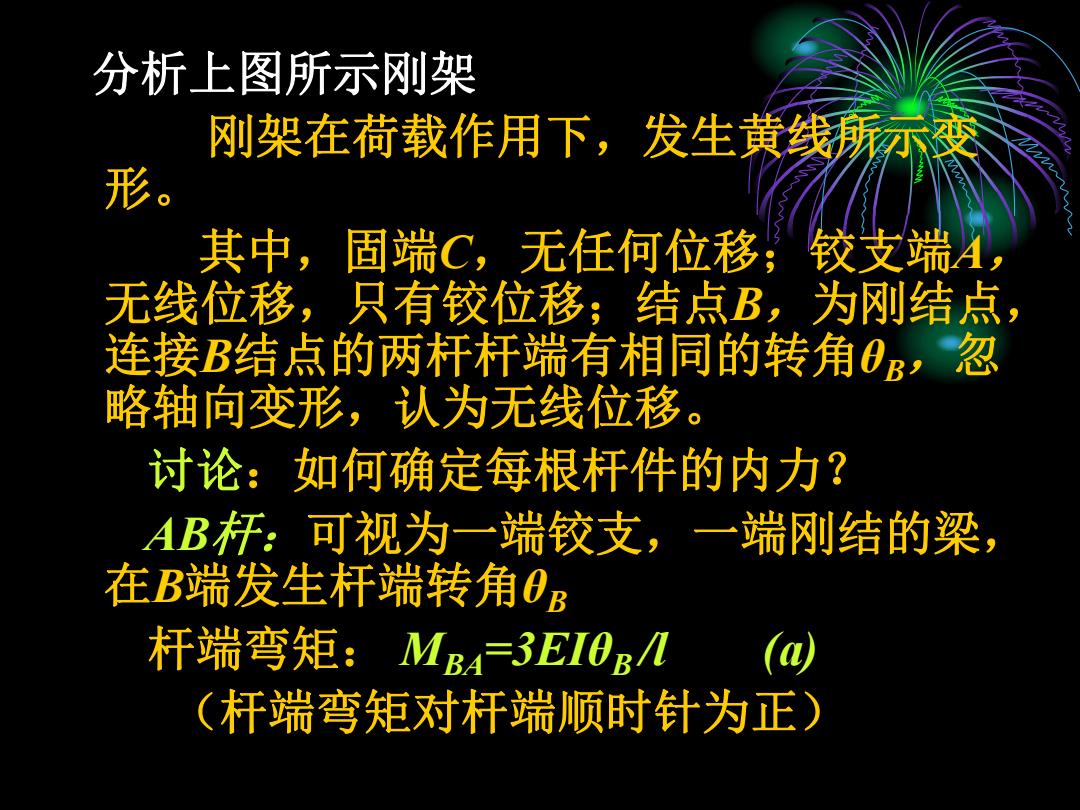
分析上图所示刚架 刚架在荷载作用下,发生黄线所示变 形。 其中,固端C,无任何位移;铰支端A, 无线位移,只有铰位移;结点B,为刚结点, 连接B结点的两杆杆端有相同的转角θB,忽 略轴向变形,认为无线位移。 讨论:如何确定每根杆件的内力? AB杆:可视为一端铰支,一端刚结的梁, 在B端发生杆端转角θB 杆端弯矩: MBA=3EIθB /l (a) (杆端弯矩对杆端顺时针为正)