《测试技术实验》实验指导书 1 Ta 0.5 -0.5 4 810 图2欠阻尼二阶系统的阶跃响 (1)求有阻尼固有频率o 阶跃响应的振荡频率为系统的有阻尼固有频率®,。根据图2 中的曲线的振荡周期,可测得 2π d 0a= (5) (2)求阻尼比5 利用任意两个超调量M,和M,可求出其阻尼比,n是该两个峰 值相隔的某一整周期数。计算公式为 f< 6品 V62+4π2n2 (6) 其中 δn=ln M (7) Min 当5<0.3时,可采用下面的简化公式 In- M (8) 2πn (3)求无阻尼固有频率0。 计算出有阻尼固有频率⊙,、阻尼比5之后,根据公式(4)可求 出系统的固有频率o 0n= d (9) 14
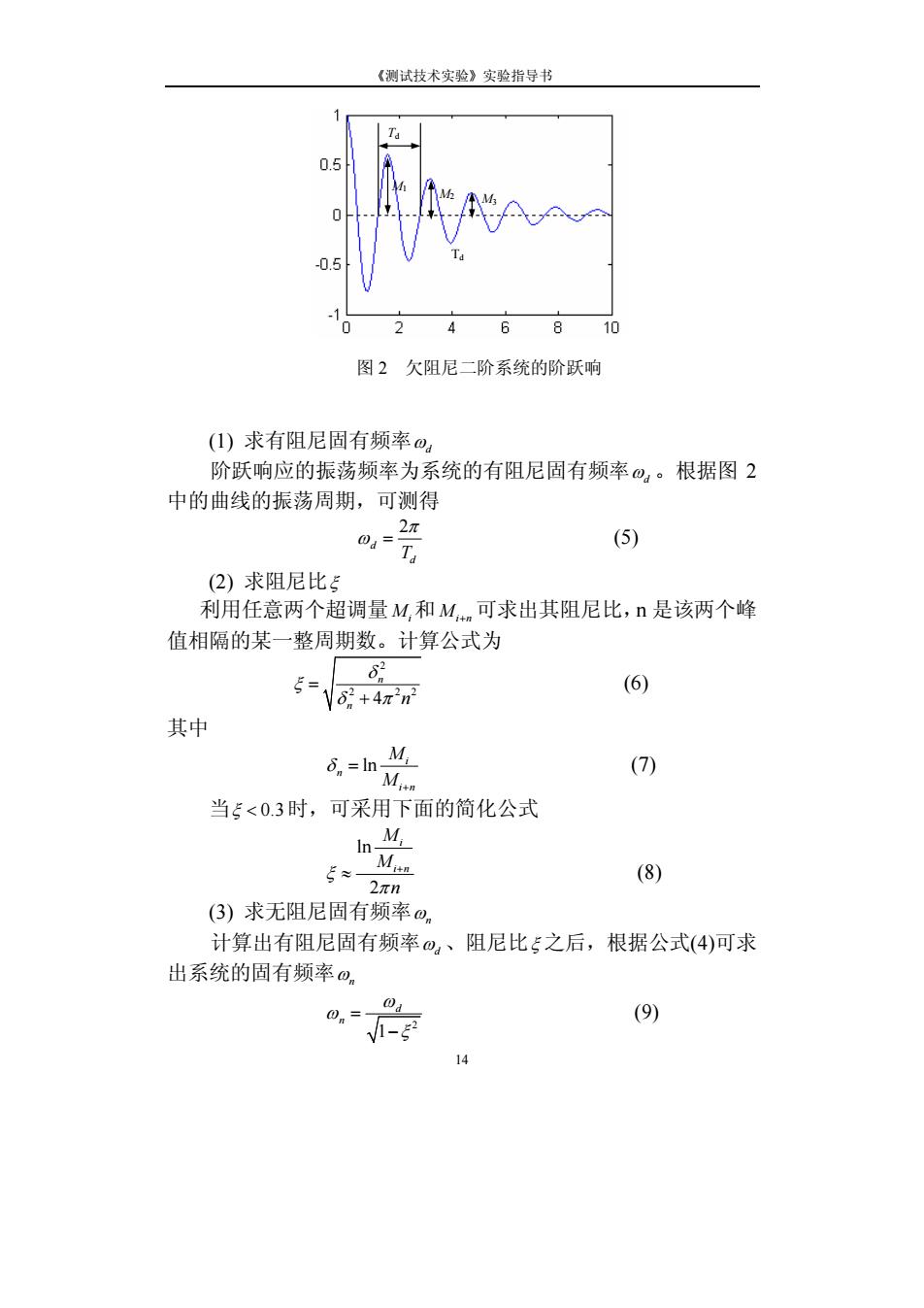
《测试技术实验》实验指导书 14 (1) 求有阻尼固有频率ωd 阶跃响应的振荡频率为系统的有阻尼固有频率ωd 。根据图 2 中的曲线的振荡周期,可测得 2 d Td π ω = (5) (2) 求阻尼比ξ 利用任意两个超调量Mi和Mi n+ 可求出其阻尼比,n 是该两个峰 值相隔的某一整周期数。计算公式为 2 2 22 4 n n n δ ξ δ π = + (6) 其中 ln i n i n M M δ + = (7) 当ξ < 0.3时,可采用下面的简化公式 ln 2 i i n M M n ξ π + ≈ (8) (3) 求无阻尼固有频率ωn 计算出有阻尼固有频率ωd 、阻尼比ξ 之后,根据公式(4)可求 出系统的固有频率ωn 2 1 d n ω ω ξ = − (9) 图 2 欠阻尼二阶系统的阶跃响 Td Td M1 M2 M3

实验三测试装置动态特性的测量 (4)求弹簧的刚度和振子组件的质量 振子组件主要由振子、滑杆、振子位置调节器、阻尼片、传 感器连接杆等组成。 利用己知质量的U型质量块,求出弹簧的刚度K。 K=mg (10) △x 式中,m为U型质量块的质量,△x为将U型质量块叠放在振子 上之后弹簧长度的变化量。 求出系统的无阻尼固有频率。,和弹簧刚度K之后,就可以根 据公式得出振子组件的质量mz, K m.= (11) 3.系统的组成 质量振子在平衡位置的振动位移由计算机实现自动采集。计算 机采集系统的原理框图如图3所示。 +12V(红) 质 差 动 2V(绿) ±12V直 台架 流电源 振 变 子 地线(白) USB数据采 USB 器 信号线(兰) 计算机 集仪(AD) 图3计算机数据采集系统框图 (1)差动变压器 该系统利用差动变压器位移传感器来检测质量振子的位移。 差动变压器的工作原理参见教材及传感器的说明书。 该位移传感器的测量范围为士60mm,满量程输出为±10V直流 电压信号。其工作电源为±12V直流电源。该位移传感器的电缆线 由4根线组成,红色的接+12V电源,绿色线接-12V电源,白色 线为地线,兰色线为信号线。 (2)USB7325A数据采集仪 USB7325A数据采集仪可同时采集16路信号,但面板上只接 出了其中10个通道。可选用其中任何一个通道来采集位移传感器 的输出
实验三 测试装置动态特性的测量 15 (4) 求弹簧的刚度和振子组件的质量 振子组件主要由振子、滑杆、振子位置调节器、阻尼片、传 感器连接杆等组成。 利用已知质量的 U 型质量块,求出弹簧的刚度 K。 mg K x = Δ (10) 式中,m 为 U 型质量块的质量,Δx 为将 U 型质量块叠放在振子 上之后弹簧长度的变化量。 求出系统的无阻尼固有频率ωn 和弹簧刚度 K 之后,就可以根 据公式得出振子组件的质量 mz, z 2 n K m ω = (11) 3.系统的组成 质量振子在平衡位置的振动位移由计算机实现自动采集。计算 机采集系统的原理框图如图 3 所示。 (1) 差动变压器 该系统利用差动变压器位移传感器来检测质量振子的位移。 差动变压器的工作原理参见教材及传感器的说明书。 该位移传感器的测量范围为±60mm,满量程输出为±10V 直流 电压信号。其工作电源为±12V 直流电源。该位移传感器的电缆线 由 4 根线组成,红色的接+12V 电源,绿色线接-12V 电源,白色 线为地线,兰色线为信号线。 (2) USB7325A 数据采集仪 USB7325A 数据采集仪可同时采集 16 路信号,但面板上只接 出了其中 10 个通道。可选用其中任何一个通道来采集位移传感器 的输出。 差 动 变 压 器 质 量 振 子 台架 +12V(红) -12V(绿) 地线(白) 信号线(兰) USB 数据采 集仪(A/D) ±12V 直 流电源 计算机 图 3 计算机数据采集系统框图 USB