虚功方程: △g·1+cFR=0 a 由平衡方程求出:FR1=-b/a △BFpc=b/ac1 注: FRI=-b/a 、虚设力系,应用虚功原理,称为虚力原理。若 设Fp=1,称为虚单位荷载法。 b、虚功方程在此实质上是几何方程。即利用静 力平衡求解几何问题。 c、方程求解的关键,在于拟求方向虚设单位 荷载,利用力系平衡求出与c相应的R1,即利用平衡 方程求解几何问题。 上述方法也可称为“单位荷载法
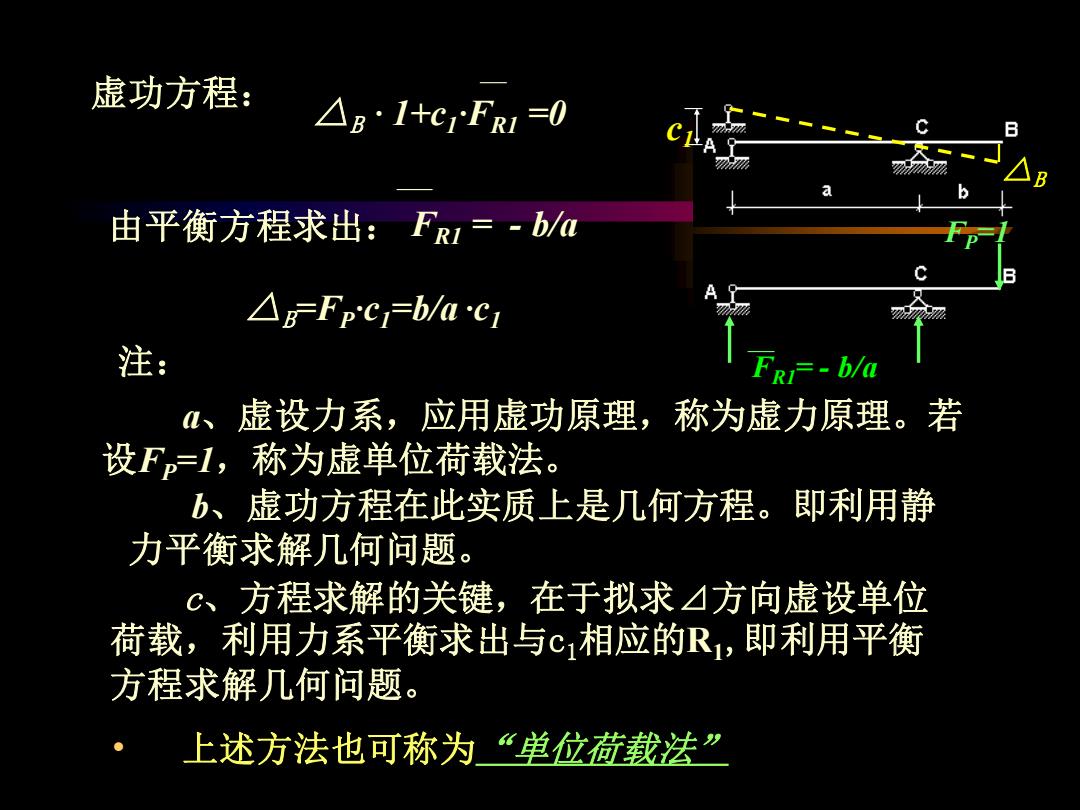
虚功方程: △B · 1+c1·FR1 =0 由平衡方程求出: FR1 = - b/a △B=FP·c1=b/a ·c1 注: a、虚设力系,应用虚功原理,称为虚力原理。若 设FP=1,称为虚单位荷载法。 b、虚功方程在此实质上是几何方程。即利用静 力平衡求解几何问题。 c、方程求解的关键,在于拟求⊿方向虚设单位 荷载,利用力系平衡求出与c1相应的R1,即利用平衡 方程求解几何问题。 • 上述方法也可称为“单位荷载法” c1 △B FP=1 FR1= - b/a
d、通过上例可推出静定结构支座移 动时,位移计算的一般公式。 注:因为静定结构在支座移动作用下,不 产生反力、内力,也不引起应变;所以属于刚 体体系的位移问题,可用刚体虚功原理求解
➢ d、通过上例可推出静定结构支座移 动时,位移计算的一般公式。 ➢ 注:因为静定结构在支座移动作用下,不 产生反力、内力,也不引起应变;所以属于刚 体体系的位移问题,可用刚体虚功原理求解
3、支座移动时静定结构的位移计算(属 列体体系的位移计算问题 当支座有给定位移c时(可能不止一个) (a)沿拟求位移A方向虚设相应单位荷载,并 求出单位荷载作用下的支座反力Fx。 (b)令虚拟力系在实际位移上作虚功,写虚功 方程: 1△+∑Fxcx=0 (9-3) (c)由虚功方程,解出所求位移: △=-∑Fx·Cx (9-4)
3、支座移动时静定结构的位移计算(属 刚体体系的位移计算问题) 当支座有给定位移ck时(可能不止一个), (a)沿拟求位移⊿方向虚设相应单位荷载,并 求出单位荷载作用下的支座反力FRK。 (b)令虚拟力系在实际位移上作虚功,写虚功 方程: (c)由虚功方程,解出所求位移: (9-3) (9-4)
例1: 图示三铰刚架,支 座B下沉c1,向右移动 B c2。求铰C的竖向位 移Ic和铰左右截面 /2l/2c2 的相对角位移pc
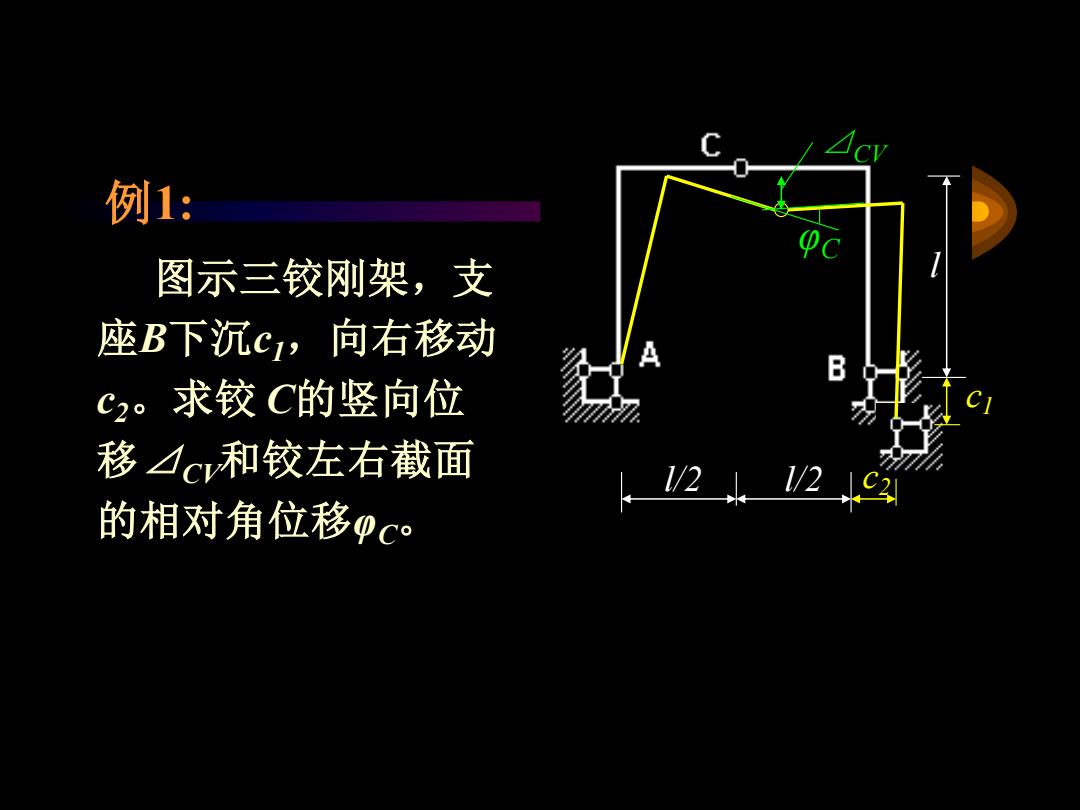
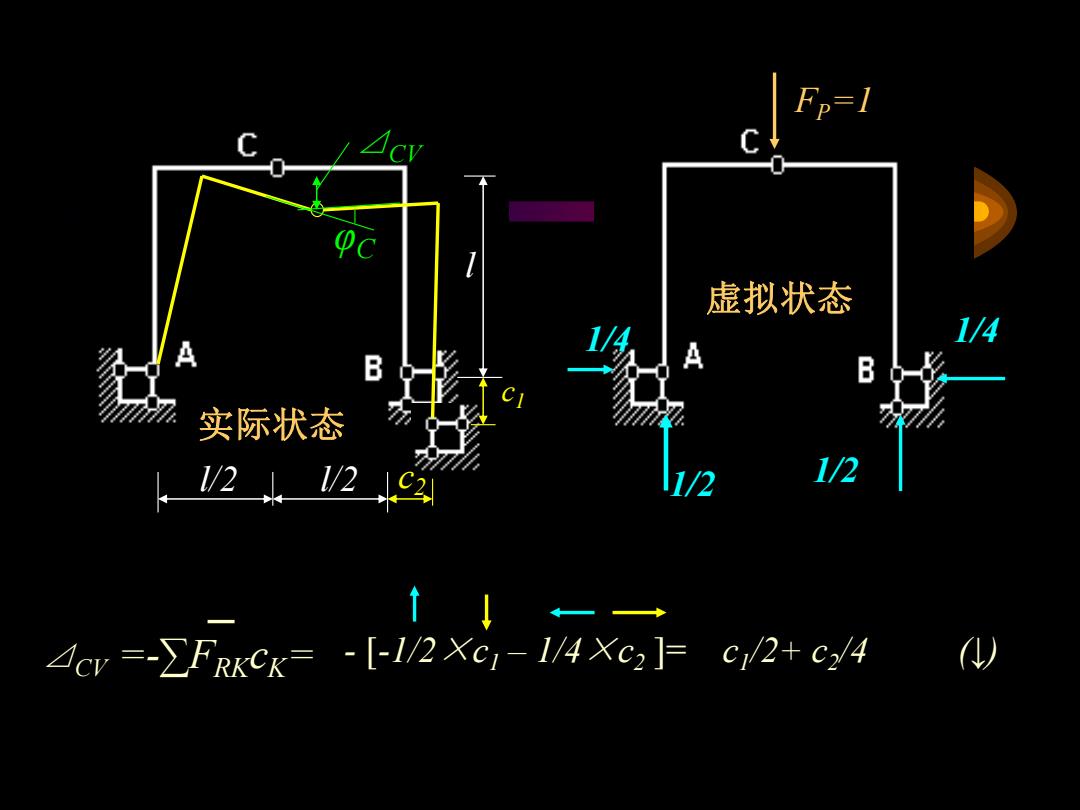
例 1 : 图示三铰刚架,支 座 B下沉 c 1,向右移动 c2。求铰 C的竖向位 移 ⊿CV和铰左右截面 的相对角位移 φ C 。 l/2 l/2 l c 1 c 2 ⊿CV φ C
C 虚拟状态 1/4 B A B 实际状态 /21/2 1/2 1/2 ↑↓ Acy =->FRKCK=-[-1/2Xe-1/4Xc2]= c/2+c2/4 )
l/2 l/2 l c1 c2 ⊿CV φC 实际状态 FP=1 1/2 1/2 1/4 1/4 虚拟状态 ⊿CV =-∑FRKcK = - [-1/2×c1 – 1/4×c2 ]= c1 /2+ c2 /4 (↓)