嘉更火大学 电气工程学院-运动控制系统 Xinjiang University 2.1.1 晶闸管整流器-电动机系统 最大失控时间: s max mf f 一交流电源频率Hz) 平均失控时间(实 ·一周内整流电压的脉冲波数 T 二T 际计算中用此式): 2 s max 晶闸管整流器的失控时(F50Hz) 最大失控时间 平均失控时间 整流电路形式 Tsmax(ms) T;(ms) 单相半波 20 10 单相桥式(全波) 10 5 三相半波 6.67 3.33 三相桥式 3.33 1.67
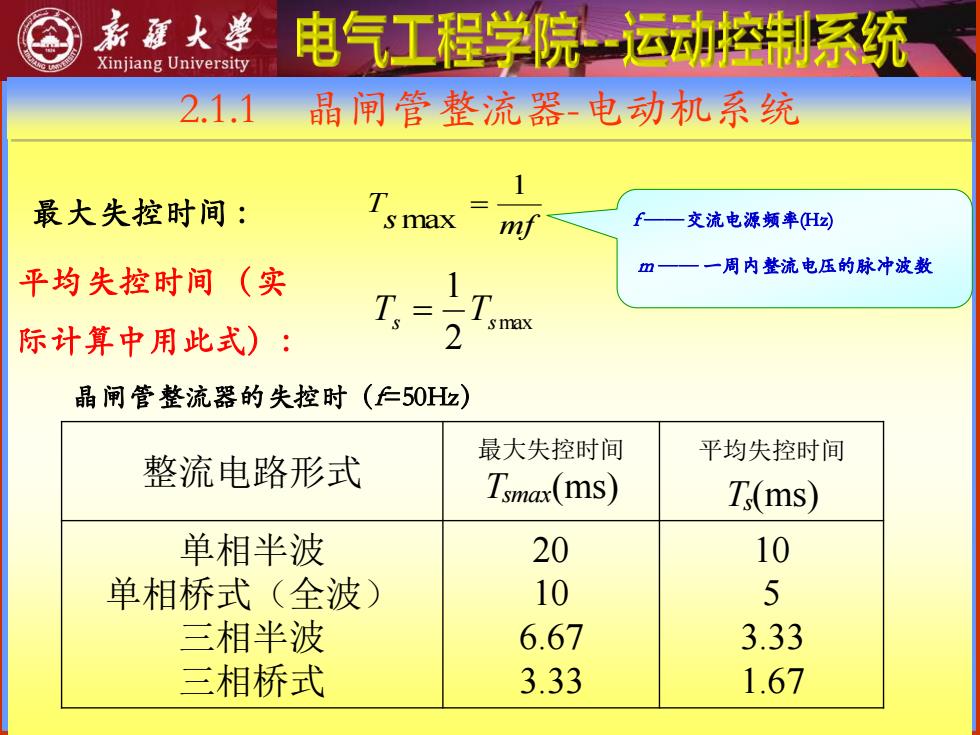
2.1.1 晶闸管整流器-电动机系统 最大失控时间: s mf T 1 max = 平均失控时间(实 际计算中用此式): max 2 1 Ts = Ts f ——交流电源频率(Hz) m —— 一周内整流电压的脉冲波数 晶闸管整流器的失控时(f=50Hz) 整流电路形式 最大失控时间 Tsmax(ms) 平均失控时间 Ts(ms) 单相半波 单相桥式(全波) 三相半波 三相桥式 20 10 6.67 3.33 10 5 3.33 1.67

新惠火学 电气工程学院运动控制系统 Xinjiang University 2.1.1 晶闸管整流器-电动机系统 晶闸管触发电路与整流装置的传递函数: >滞后环节的输入为阶跃信号1(①,输出要隔一定时间后才出现响应1(-Ts); > 输入输出关系为:Uo=K,U。×1(t-T,) >传递函数为: 厘)= ao(s)=K.eT U(s) 传递函数的近似处理: W(s)=Ke-T*= K K 按泰勒级数展开,可得 e-Ts 1++72+ 依据工程近似处理的原则,可忽略高次项,把整流装置近似看作一阶惯性环节 W.(S
2.1.1 晶闸管整流器-电动机系统 晶闸管触发电路与整流装置的传递函数: ➢ 滞后环节的输入为阶跃信号1(t),输出要隔一定时间后才出现响应1(t-Ts); ➢ 输入输出关系为: ➢ 传递函数为: 1( ) d 0 s c Ts U = K U t − T s s c d s s K e U s U s W s − = = ( ) ( ) ( ) 0 传递函数的近似处理: 按泰勒级数展开,可得 + + + + = = = − − 3 3 s 2 2 s s s T s T s s s s T s 3! 1 T s 2! 1 1 T s K e K W (s) K e s s 依据工程近似处理的原则,可忽略高次项,把整流装置近似看作一阶惯性环节 T s K W s s s s + 1 ( )

嘉蕴火兽 Xinjiang University 电气工程学院-运动控制系统 2.1.1 晶闸管整流器-电动机系统 5.晶闸管整流器运行中存在的问题 晶闸管是单向导电的 对过电压、过电流和过高的du/dt与di/dt都十分敏感 导通角变小时会使得系统的功率因数也随之减少,称为“电力公害” 晶闸管整流器
2.1.1 晶闸管整流器-电动机系统 5. 晶闸管整流器运行中存在的问题 晶闸管整流器 晶闸管是单向导电的 对过电压、过电流和过高的du/dt与di/dt都十分敏感 导通角变小时会使得系统的功率因数也随之减少,称为“电力公害
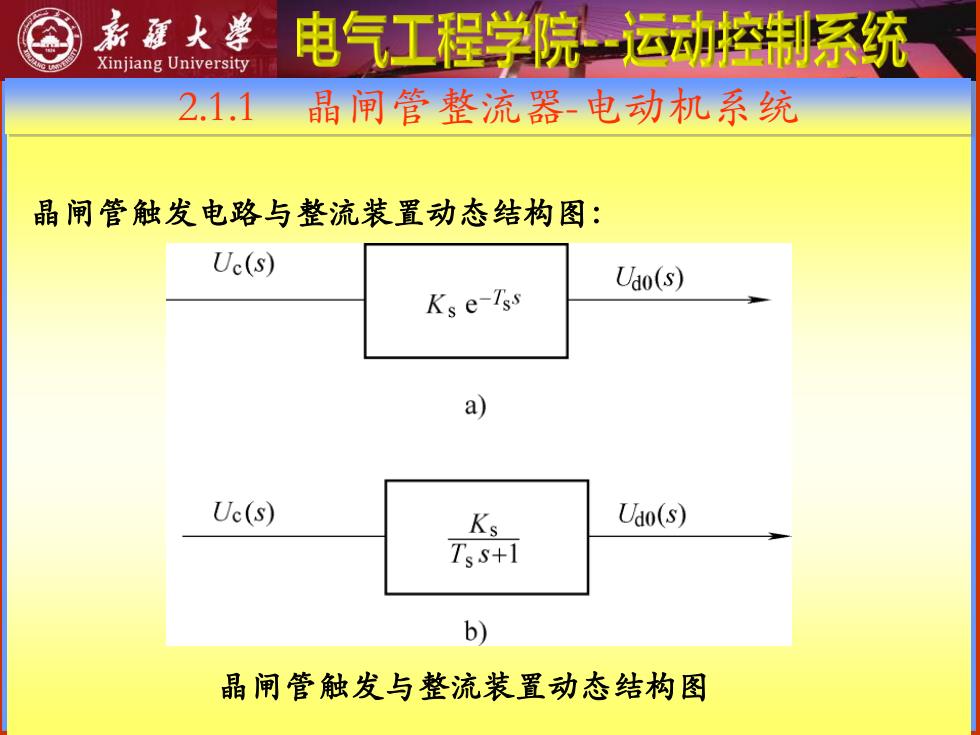
新藤火学 电气工程学院运动控制系统 Xinjiang University 2.1.1 晶闸管整流器-电动机系统 晶闸管触发电路与整流装置动态结构图: Ue(s) Uao(s) K's e-7ss a) Uc(s) Ks Uao(s) Tss+1 b) 晶闸管触发与整流装置动态结构图
2.1.1 晶闸管整流器-电动机系统 晶闸管触发与整流装置动态结构图 晶闸管触发电路与整流装置动态结构图:
嘉惠火大学 Xinjiang University 电气工程学院运动控制系统 2.1.2直流PWM变换器-电动机系统 > 全控型电力电子器件采用脉冲宽度 调制的高频开关控制方式 > 形成脉宽调制变换器-直流电动机 调速系统,简称直流脉宽调速系统, 或直流PWIM调速系统。 直流PWWM调速系统的应用日益广 泛,特别在中、小容量的高动态性 易登网 能系统中,已经完全取代了VM系 WWW.EDENG.CN 统
2.1.2 直流PWM变换器-电动机系统 ➢ 全控型电力电子器件采用脉冲宽度 调制的高频开关控制方式 ➢ 形成脉宽调制变换器-直流电动机 调速系统,简称直流脉宽调速系统, 或直流PWM调速系统。 ➢ 直流PWM调速系统的应用日益广 泛,特别在中、小容量的高动态性 能系统中,已经完全取代了V-M系 统