
新莲大学 Xinjiang University 电气工程学院一运动控制系统 2.1.1 晶闸管整流器-电动机系统 3.晶闸管整流器-电动机系统的机械特性 在电流连续区,显示出较硬的机械特性;在电流断续区,机械特性 很软,理想空载转速翘得很高。 、分界线 整流状态 所续区 连续区 逆变状态 a增大 b) V-M系统的机械特性
2.1.1 晶闸管整流器-电动机系统 3.晶闸管整流器-电动机系统的机械特性 在电流连续区,显示出较硬的机械特性;在电流断续区,机械特性 很软,理想空载转速翘得很高。 V-M系统的机械特性
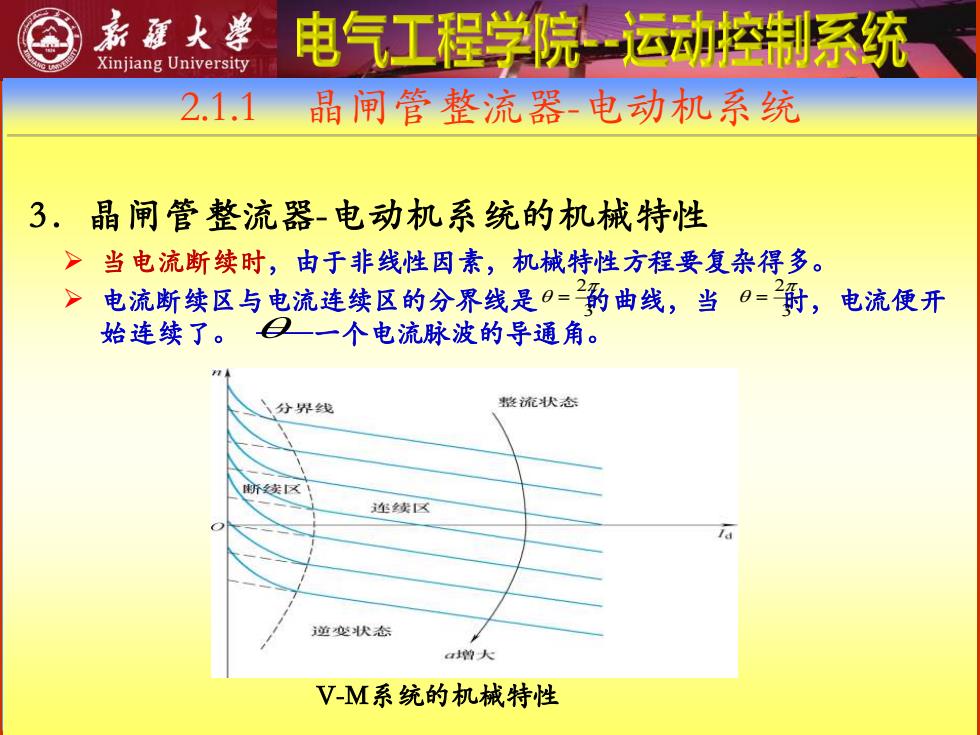
亲群大学 电气工程学院运动控制系统 Xinjiang University 2.1.1 晶闸管整流器-电动机系统 3.晶闸管整流器-电动机系统的机械特性 >当电流断续时,由于非线性因素,机械特性方程要复杂得多。 >电流断续区与电流连续区的分界线是日=的曲线,当日=跗,电流便开 始连续了。孕一一个电流脉波的导通角。 分界线 整流状态 、围所续区 馆续以 逆速状态 a增人 V-M系统的机械特性
2.1.1 晶闸管整流器-电动机系统 3.晶闸管整流器-电动机系统的机械特性 ➢ 当电流断续时,由于非线性因素,机械特性方程要复杂得多。 ➢ 电流断续区与电流连续区的分界线是 的曲线,当 时,电流便开 始连续了。 ——一个电流脉波的导通角。 V-M系统的机械特性 3 2 = 3 2 =

亲蕴火学 Xinjiang University 电气工程学院运动控制系统 2.1.1 晶闸管整流器-电动机系统 4.晶闸管触发和整流装置的放大系数和传递函数 晶闸管触发电路 在设计调速系统时,只能 和整流电路的特 在一定的工作范围内近似 性是非线性的 地看成线性环节 得到了它的放大系数和传 递函数后,用线性控制理 论分析整个调速系统 晶闸管
2.1.1 晶闸管整流器-电动机系统 4.晶闸管触发和整流装置的放大系数和传递函数 晶闸管触发电路 和整流电路的特 性是非线性的 在设计调速系统时,只能 在一定的工作范围内近似 地看成线性环节 得到了它的放大系数和传 递函数后,用线性控制理 论分析整个调速系统 晶闸管
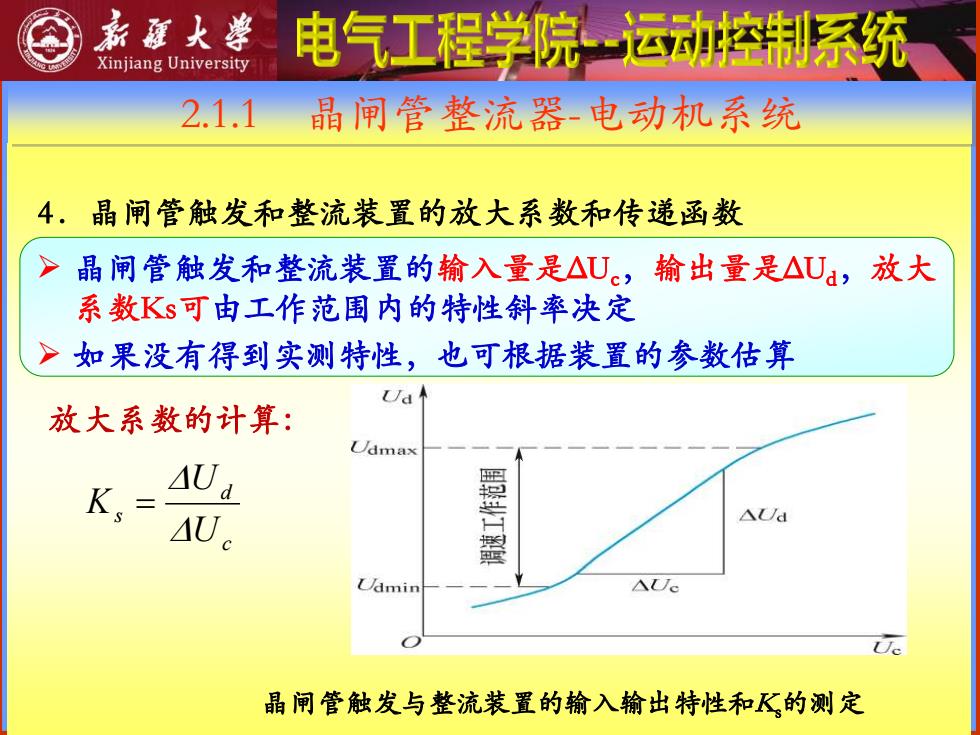
嘉更火大学 Xinjiang University 电气工程学院-运动控制系统 2.1.1 晶闸管整流器-电动机系统 4.晶闸管触发和整流装置的放大系数和传递函数 > 晶闸管触发和整流装置的输入量是△Ue,输出量是△U,放大 系数Ks可由工作范围内的特性斜率决定 >如果没有得到实测特性,也可根据装置的参数估算 Ja个 放大系数的计算: Udmax Ks AU a △U △Jd Udmin 晶闸管触发与整流装置的输入输出特性和区的测定
2.1.1 晶闸管整流器-电动机系统 4.晶闸管触发和整流装置的放大系数和传递函数 ➢ 晶闸管触发和整流装置的输入量是ΔUc,输出量是ΔUd,放大 系数Ks可由工作范围内的特性斜率决定 ➢ 如果没有得到实测特性,也可根据装置的参数估算 放大系数的计算: c d s U U K = 晶闸管触发与整流装置的输入输出特性和Ks的测定
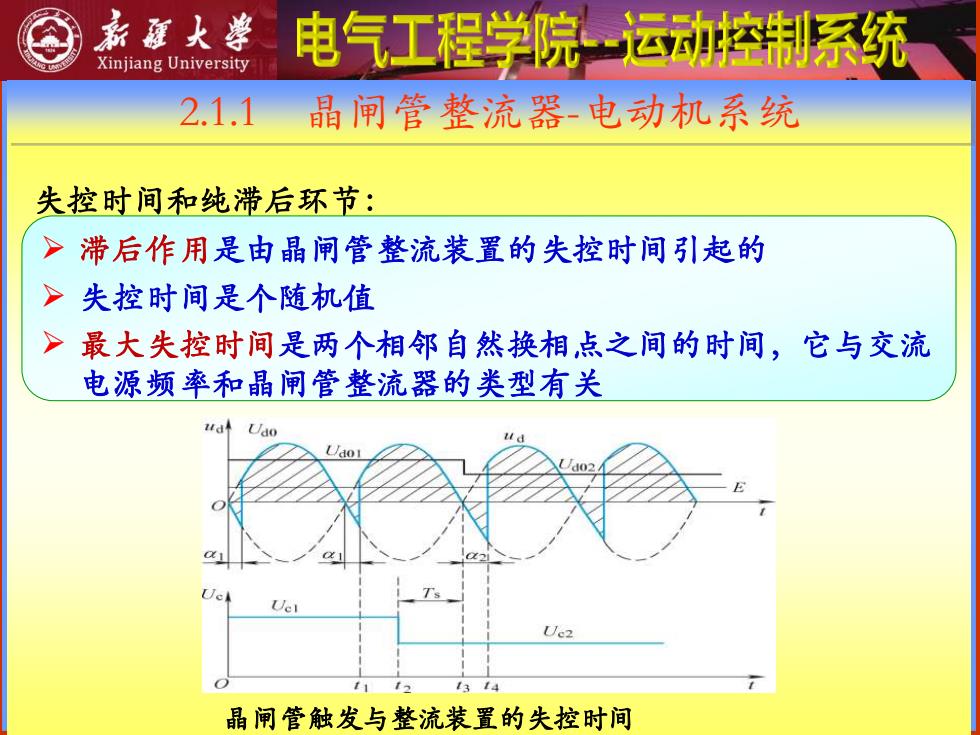
新题大兽 Xinjiang University 电气工程学院运动控制系统 2.1.1 晶闸管整流器电动机系统 失控时间和纯滞后环节: >滞后作用是由晶闸管整流装置的失控时间引起的 >失控时间是个随机值 > 最大失控时间是两个相邻自然换相点之间的时间,它与交流 电源频率和晶闸管整流器的类型有关 4d Ts Ue2 晶闸管触发与整流装置的失控时间
2.1.1 晶闸管整流器-电动机系统 失控时间和纯滞后环节: ➢ 滞后作用是由晶闸管整流装置的失控时间引起的 ➢ 失控时间是个随机值 ➢ 最大失控时间是两个相邻自然换相点之间的时间,它与交流 电源频率和晶闸管整流器的类型有关 晶闸管触发与整流装置的失控时间