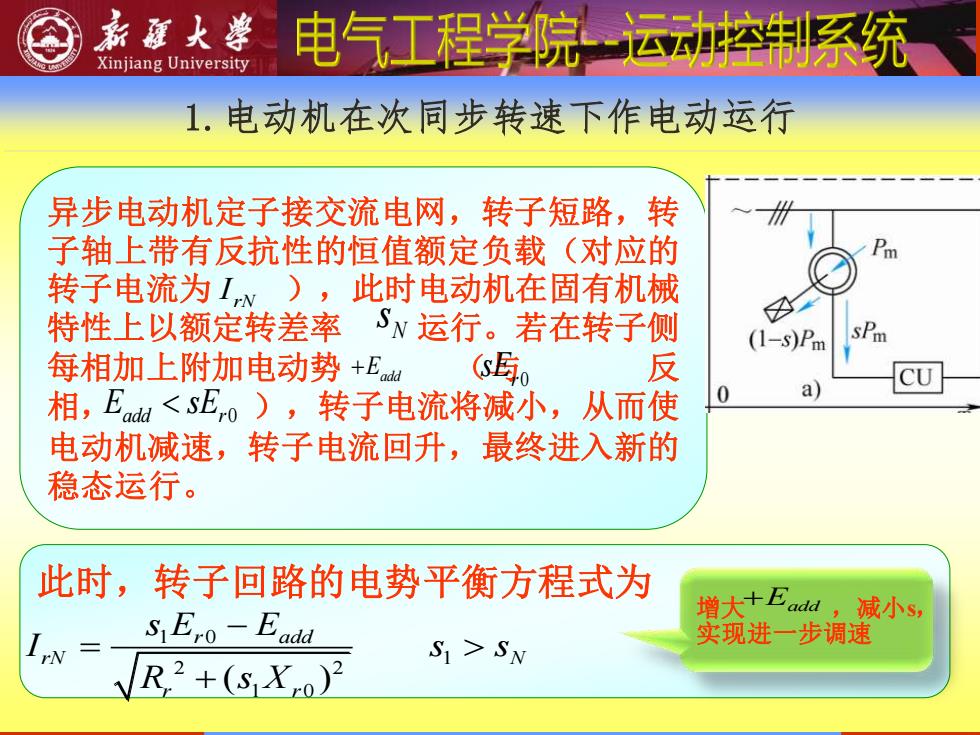
新庭火学 Xinjiang University 电气工程学院运动控制系统 1.电动机在次同步转速下作电动运行 异步电动机定子接交流电网,转子短路,转 子轴上带有反抗性的恒值额定负载(对应的 转子电流为I、),此时电动机在固有机械 特性上以额定转差率Sⅳ运行。若在转子侧 (1-s)Pm sPm 每相加上附加电动势+E 写0 反 相,Ea<sE,。),转子电流将减小,从而使 a) 电动机减速,转子电流回升,最终进入新的 稳态运行。 此时,转子回路的电势平衡方程式为 增大+EaH,减小s, S Er0-E "add rN S SN 实现进一步调速 R2+(sX0)
1.电动机在次同步转速下作电动运行 异步电动机定子接交流电网,转子短路,转 子轴上带有反抗性的恒值额定负载(对应的 转子电流为 ),此时电动机在固有机械 特性上以额定转差率 运行。若在转子侧 每相加上附加电动势 (与 反 相, ),转子电流将减小,从而使 电动机减速,转子电流回升,最终进入新的 稳态运行。 rN I N s E sE add r 0 此时,转子回路的电势平衡方程式为 1 0 1 2 2 1 0 ( ) r add rN N r r s E E I s s R s X − = + 增大 ,减小s, 实现进一步调速 +Eadd +Eadd r 0 sE
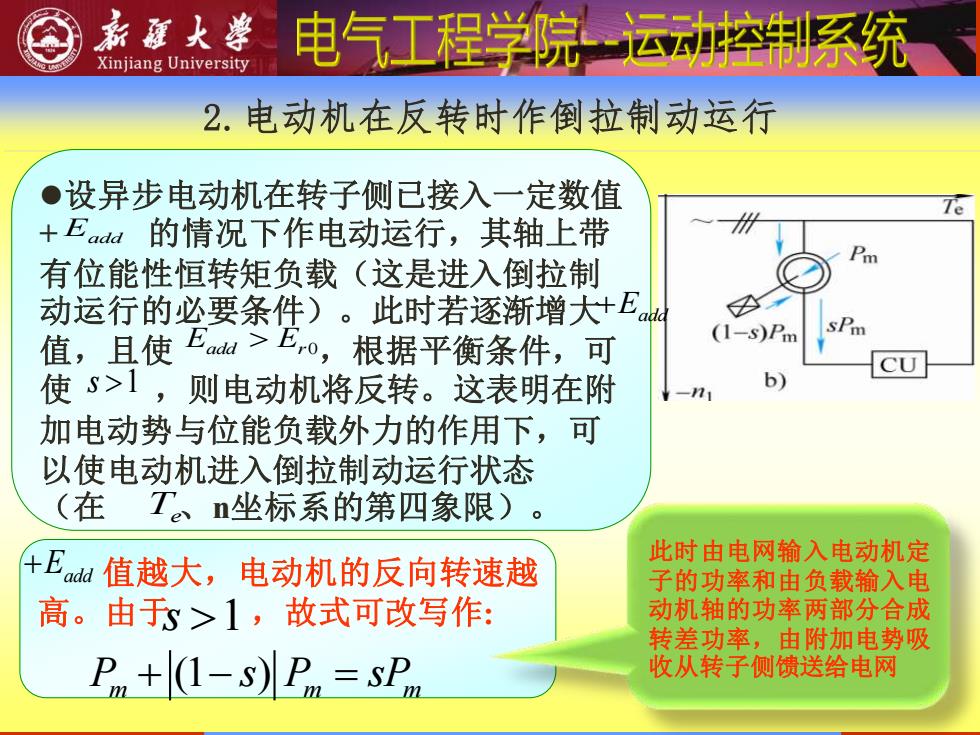
嘉更火大学 Xinjiang University 电气工程学院运动控制系统 2.电动机在反转时作倒拉制动运行 ●设异步电动机在转子侧已接入一定数值 +Ea的情况下作电动运行,其轴上带 有位能性恒转矩负载(这是进入倒拉制 动运行的必要条件)。此时若逐渐增大艹E (1-s)Pm sPm 值,且使Baa>B,o,根据平衡条件,可 使S>1,则电动机将反转。这表明在附 加电动势与位能负载外力的作用下,可 以使电动机进入倒拉制动运行状态 (在 T。n坐标系的第四象限)。 +Eda值越大,电动机的反向转速越 此时由电网输入电动机定 子的功率和由负载输入电 高。由于s>1,故式可改写作: 动机轴的功率两部分合成 转差功率,由附加电势吸 P +(1-s)P =sP 收从转子侧馈送给电网
2.电动机在反转时作倒拉制动运行 值越大,电动机的反向转速越 高。由于 ,故式可改写作: ⚫设异步电动机在转子侧已接入一定数值 + 的情况下作电动运行,其轴上带 有位能性恒转矩负载(这是进入倒拉制 动运行的必要条件)。此时若逐渐增大 值,且使 ,根据平衡条件,可 使 ,则电动机将反转。这表明在附 加电动势与位能负载外力的作用下,可 以使电动机进入倒拉制动运行状态 (在 T e 、n坐标系的第四象限)。 +Eadd s 1 (1 ) P s P sP m m m + − = Eadd E E add r 0 s 1 此时由电网输入电动机定 子的功率和由负载输入电 动机轴的功率两部分合成 转差功率,由附加电势吸 收从转子侧馈送给电网 +Eadd

亲莲大学 Xinjiang University 电气工程学院运动控制系统 3.电动机在超同步转速下作回馈制动运行 ●进入这种运行状态的必要条 件是有恒定机械外力作用在电 动机轴上,方向与电动机转速 方向相同,并使电动机能在超 Pm 过其同步转速的情况下运行 ●典型的工况为电动车辆下坡 的运动,车辆上坡时电动机作 (1-s)Pm sPm 电动运行,下坡时车辆重量形 成的坡向分力能克服各种磨擦 阻力而使车辆下滑,为了防止 下坡速度过高,被车辆拖动的 电动机便需要产生制动转矩以 限制车辆的速度
3. 电动机在超同步转速下作回馈制动运行 ⚫进入这种运行状态的必要条 件是有恒定机械外力作用在电 动机轴上,方向与电动机转速 方向相同,并使电动机能在超 过其同步转速 的情况下运行 ⚫典型的工况为电动车辆下坡 的运动,车辆上坡时电动机作 电动运行,下坡时车辆重量形 成的坡向分力能克服各种磨擦 阻力而使车辆下滑,为了防止 下坡速度过高,被车辆拖动的 电动机便需要产生制动转矩以 限制车辆的速度

新雕大学 Xinjiang University 电气工程学院运动控制系统 超同步转速下作回馈制动运行 ●此时电动机的运转方向和上坡时一样,但 运行状态却变成回馈制动,转速超过其同步 Pm 转速n,,转差率s<0,转子电动势sE,和 转子电流I的相位都与电动运行时相反 (1-s)Pm CU c) 若处于发电状态运行的电动机转子回路再串入一个与转子电动 势S上o反相的附加电动势一bad SEo+E add s Ero-Eadd = VR2+(sxo)2 VR2+(sX,0)2 电动机将在比未串入E出 时的转速更高的状态下作回馈制动运
超同步转速下作回馈制动运行 ⚫此时电动机的运转方向和上坡时一样,但 运行状态却变成回馈制动,转速超过其同步 转速 ,转差率 ,转子电动势 和 转子电流 的相位都与电动运行时相反 若处于发电状态运行的电动机转子回路再串入一个与转子电动 势 反相的附加电动势 电动机将在比未串入 时的转速更高的状态下作回馈制动运 行 n1 s 0 r0 sE r0 sE −Eadd 0 0 2 2 2 2 0 0 ( ) ( ) r add r add r r r r r sE E s E E I R sX R sX + − = = − + + Eadd − r I
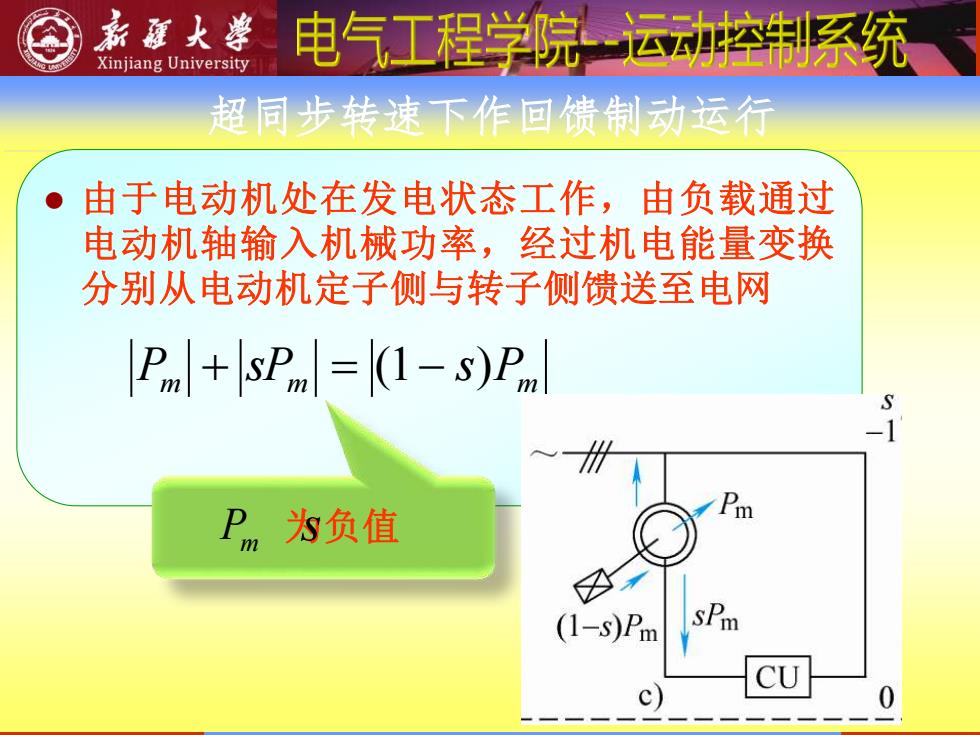
嘉原火学 Xinjiang University 电气工程学院运动控制系统 超同步转速下作回馈制动运行 由于电动机处在发电状态工作,由负载通过 电动机轴输入机械功率,经过机电能量变换 分别从电动机定子侧与转子侧馈送至电网 Pu+sP=(1-s)P 为负值 Pm (1-s)Pm sPm CU
超同步转速下作回馈制动运行 ⚫ 由于电动机处在发电状态工作,由负载通过 电动机轴输入机械功率,经过机电能量变换 分别从电动机定子侧与转子侧馈送至电网 m m Pm P + sP = (1− s) P m 为负值 s