嘉更火大学 Xinjiang University 电气工程学院运动控制系统 串电阻调速 M 3 Er=sErO Eadd 串电阻 调速 在绕线转子异步电动机转子串电阻调速时,转子电流 会在外接电阻上产生一个交流电压,这一交流电压与 转子电流有着相同的频率和相位,调速时产生的转差 功率被消耗在外接电阻上
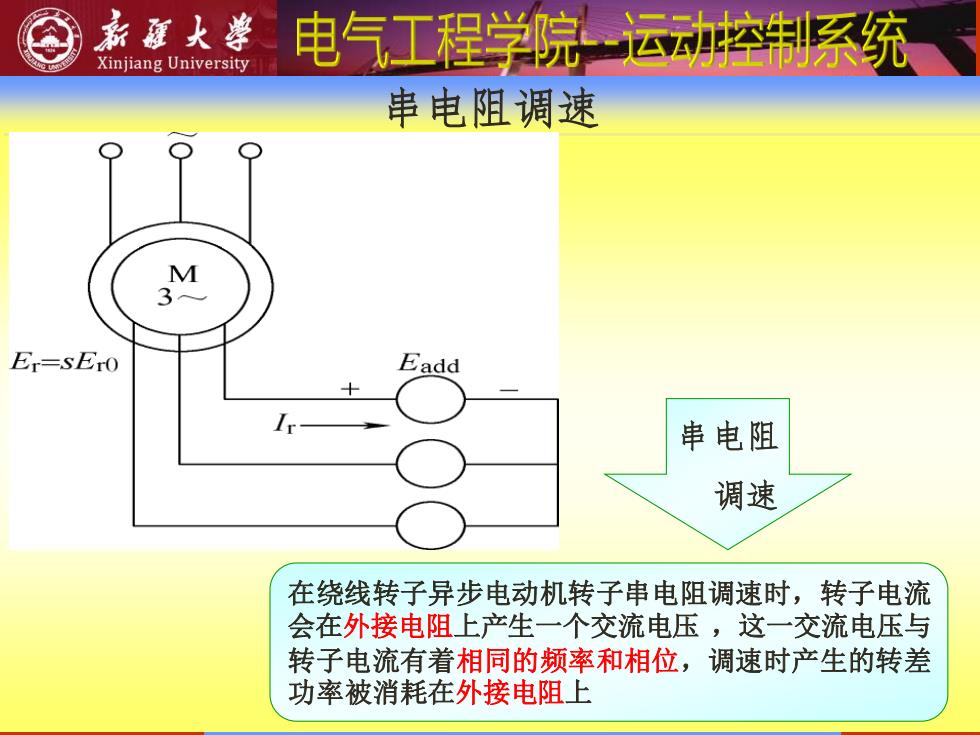
串电阻调速 在绕线转子异步电动机转子串电阻调速时,转子电流 会在外接电阻上产生一个交流电压 ,这一交流电压与 转子电流有着相同的频率和相位,调速时产生的转差 功率被消耗在外接电阻上 串电阻 调速
亲莲大学 Xinjiang University 电气工程学院运动控制系统 转子附加电动势的作用 引入一个可控的交流附加电动势 附加电动势的幅值和频率与交流电压 相同 相位与转子电动势相反 M 3 Er=sEro Eadd 引入附加电动势后, 电动机转子回路的合电动势减小了 转子电流和电磁转矩也相应减小 电动机减速 转子电动势增大 此时,未串入附加电动势和串入附加 转子电流增大 电动势后的转子电流相等S2>S): 直至转差率增大到2(>S)时, SEro S2Ero-Eadd 电动机便进入新的较低转速的稳定 R2+(5Xo) VR+(SXo)月 状态
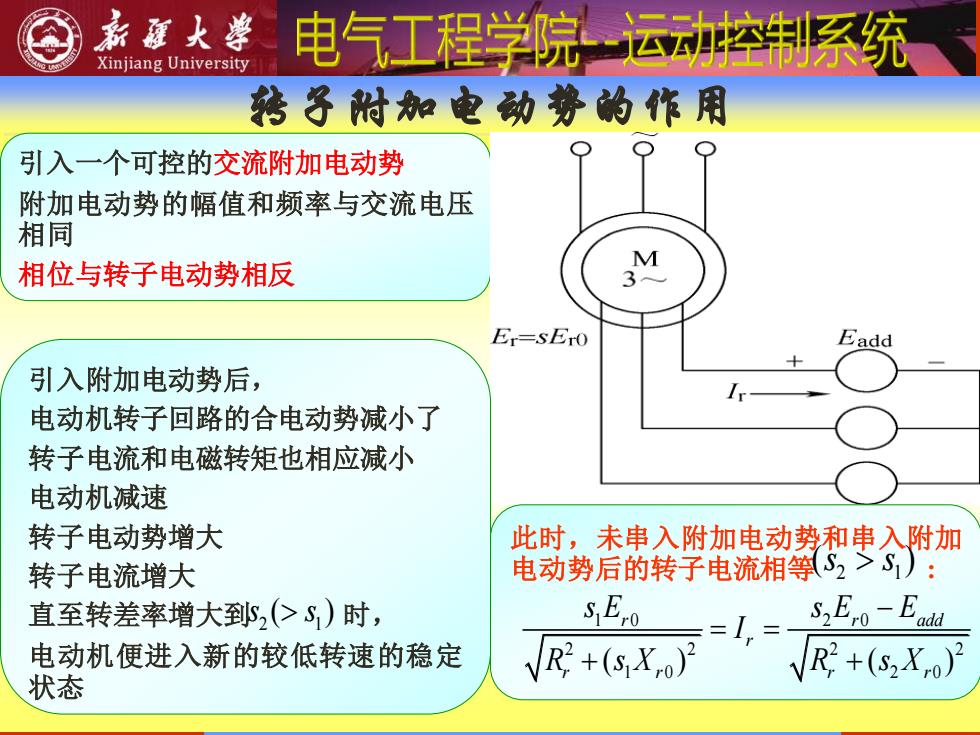
转子附加电动势的作用 引入一个可控的交流附加电动势 附加电动势的幅值和频率与交流电压 相同 相位与转子电动势相反 引入附加电动势后, 电动机转子回路的合电动势减小了 转子电流和电磁转矩也相应减小 电动机减速 转子电动势增大 转子电流增大 直至转差率增大到 时, 电动机便进入新的较低转速的稳定 状态 2 1 s s ( ) 此时,未串入附加电动势和串入附加 电动势后的转子电流相等 2 1 : ( ) s s 1 0 2 0 2 2 2 2 1 0 2 0 ( ) ( ) r r add r r r r r s E s E E I R s X R s X − = = + +
亲群大学 Xinjiang University 电气工程学院运动控制系统 7.1.2绕线转子异步电动机双馈调速的五种工况 2t ●在绕线型异步电动机转子 侧引入一个可控的附加电动 势并改变其幅值,就可以实 (1-s)Pm (1-s)Pm CU CU 现对电动机转速的调节 c) 0n1 d 州 ●可控附加电动势的引入必 然在转子侧形成功率的传送, (1-s)Pm sPm (1-s)Pm 可以把转子侧的转差功率传 CU a) CU 二Te e 输到与之相连的交流电源或 外电路中去,也可以是从外 面吸收功率到转子中来。从 (I-s)Pm CU 2-1 b) 功率传送的角度看,可以认 绕线型异步电动机在转子附加电动势时的工况及 为是用控制异步电动机转子 其功率流程 中转差功率的大小与流向来 a)次同步速电动状态b)反转倒拉制动状态c) 超同步速回馈制动状态 实现对电动机转速的调节 d)超同步速电动状态e)次同步速回债制动状态 CU一功率变换单元
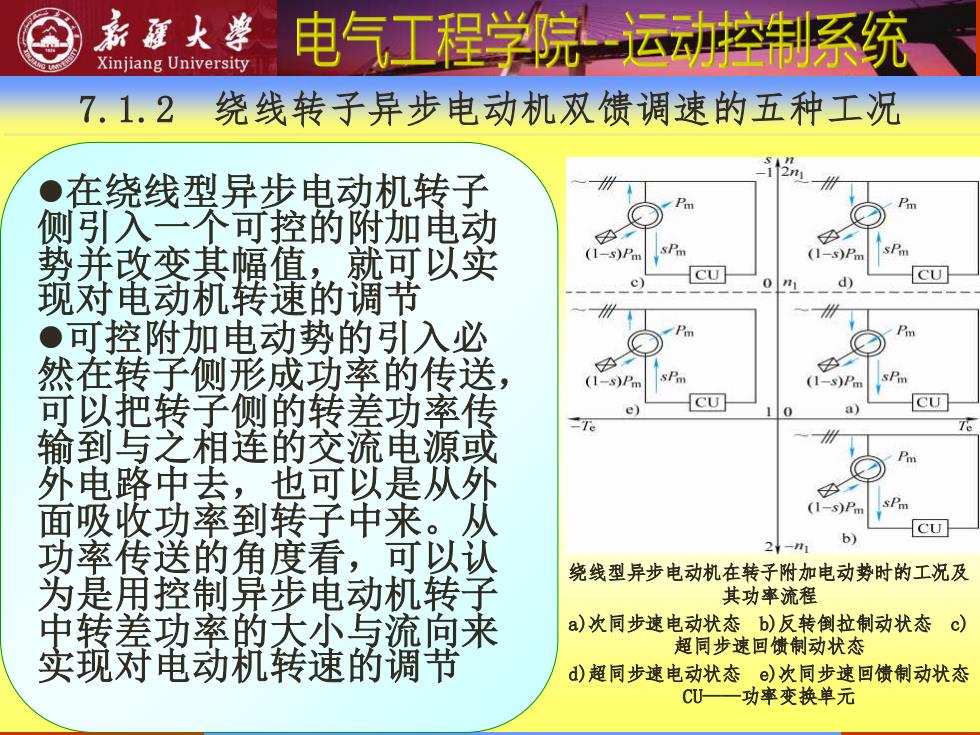
7.1.2 绕线转子异步电动机双馈调速的五种工况 ⚫在绕线型异步电动机转子 侧引入一个可控的附加电动 势并改变其幅值,就可以实 现对电动机转速的调节 ⚫可控附加电动势的引入必 然在转子侧形成功率的传送, 可以把转子侧的转差功率传 输到与之相连的交流电源或 外电路中去,也可以是从外 面吸收功率到转子中来。从 功率传送的角度看,可以认 为是用控制异步电动机转子 中转差功率的大小与流向来 实现对电动机转速的调节 绕线型异步电动机在转子附加电动势时的工况及 其功率流程 a)次同步速电动状态 b)反转倒拉制动状态 c) 超同步速回馈制动状态 d)超同步速电动状态 e)次同步速回馈制动状态 CU——功率变换单元
嘉惠火学 Xinjiang University 电气工程学院运动控制系统 7.1.2绕线转子异步电动机双馈调速的五种工况 考虑到电动机转子电动势与 清果翻壬凝 (1-s)Pm -s)Pn d) 其值与交流电网的频率往往 不一致,所以不能把电动机 m 的转子直接与交流电网相连, (1-s)Pm sPm (1-s)Pm 而必须通过一个中间环节。 CU e a 这个中间环节除了有功率传 递作用外,还应具有对不同 率的电功率进行变换的功 (1-s)Pm CU 能 故称为功率变换单元 2-1 b) 绕线型异步电动机在转子附加电动势时的工况及 (Power Converter Unit, 其功率流程 简称CU) a)次同步速电动状态b)反转倒拉制动状态c) 超同步速回馈制动状态 d)超同步速电动状态e)次同步速回债制动状态 CU一功率变换单元
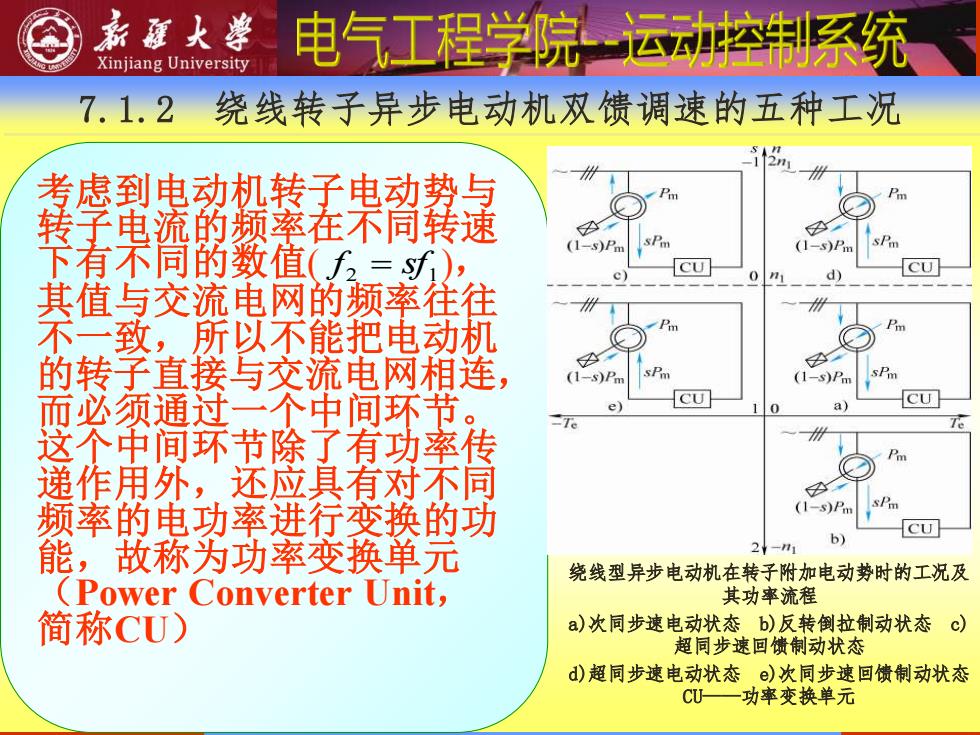
7.1.2 绕线转子异步电动机双馈调速的五种工况 考虑到电动机转子电动势与 转子电流的频率在不同转速 下有不同的数值( ), 其值与交流电网的频率往往 不一致,所以不能把电动机 的转子直接与交流电网相连, 而必须通过一个中间环节。 这个中间环节除了有功率传 递作用外,还应具有对不同 频率的电功率进行变换的功 能,故称为功率变换单元 (Power Converter Unit, 简称CU) 2 1 f = sf 绕线型异步电动机在转子附加电动势时的工况及 其功率流程 a)次同步速电动状态 b)反转倒拉制动状态 c) 超同步速回馈制动状态 d)超同步速电动状态 e)次同步速回馈制动状态 CU——功率变换单元
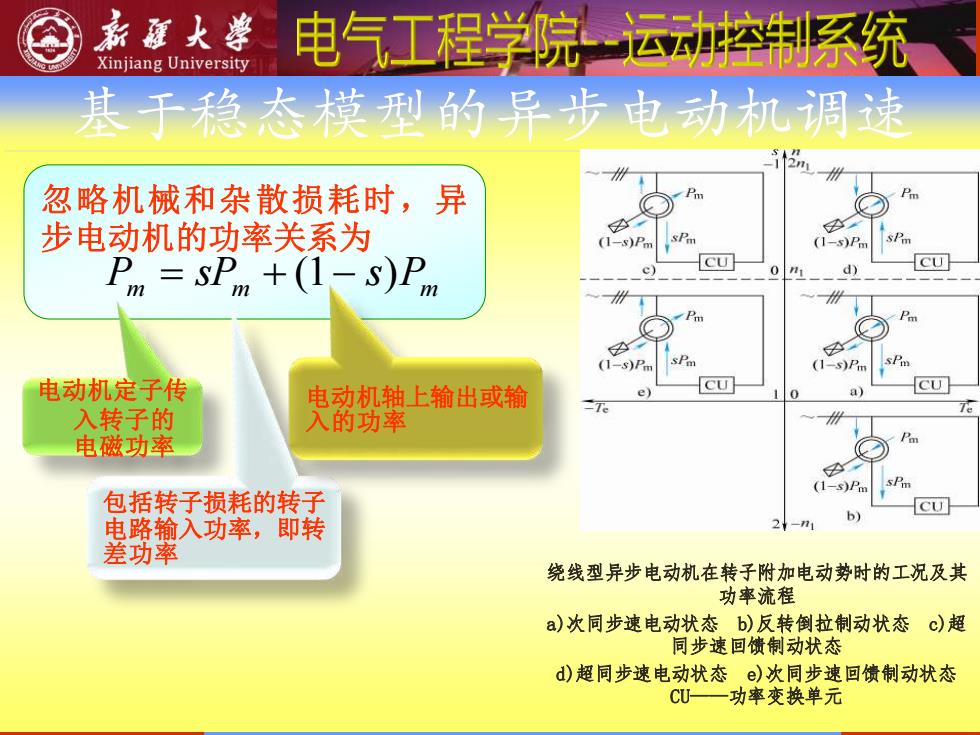
新庭大学 Xinjiang University 电气工程学院-运动控制系统 甚于稳态模型的异步电动机调速 忽略机械和杂散损耗时,异 步电动机的功率关系为 (I-s)P (1-s)Pm =sPm +(1-S)P CU 0 d) -s)Pm (1-s)Pin 电动机定子传 CU 电动机轴上输出或输 CU 0 a) 入转子的 入的功率 电磁功率 包括转子损耗的转子 b) 电路输入功率,即转 2-1 差功率 绕线型异步电动机在转子附加电动势时的工况及其 功率流程 a)次同步速电动状态b)反转倒拉制动状态c)超 同步速回馈制动状态 d)超同步速电动状态e)次同步速回馈制动状态 CU一功率变换单元
基于稳态模型的异步电动机调速 忽略机械和杂散损耗时,异 步电动机的功率关系为 绕线型异步电动机在转子附加电动势时的工况及其 功率流程 a)次同步速电动状态 b)反转倒拉制动状态 c)超 同步速回馈制动状态 d)超同步速电动状态 e)次同步速回馈制动状态 CU——功率变换单元 m m Pm P = sP + (1− s) 电动机定子传 入转子的 电磁功率 包括转子损耗的转子 电路输入功率,即转 差功率 电动机轴上输出或输 入的功率