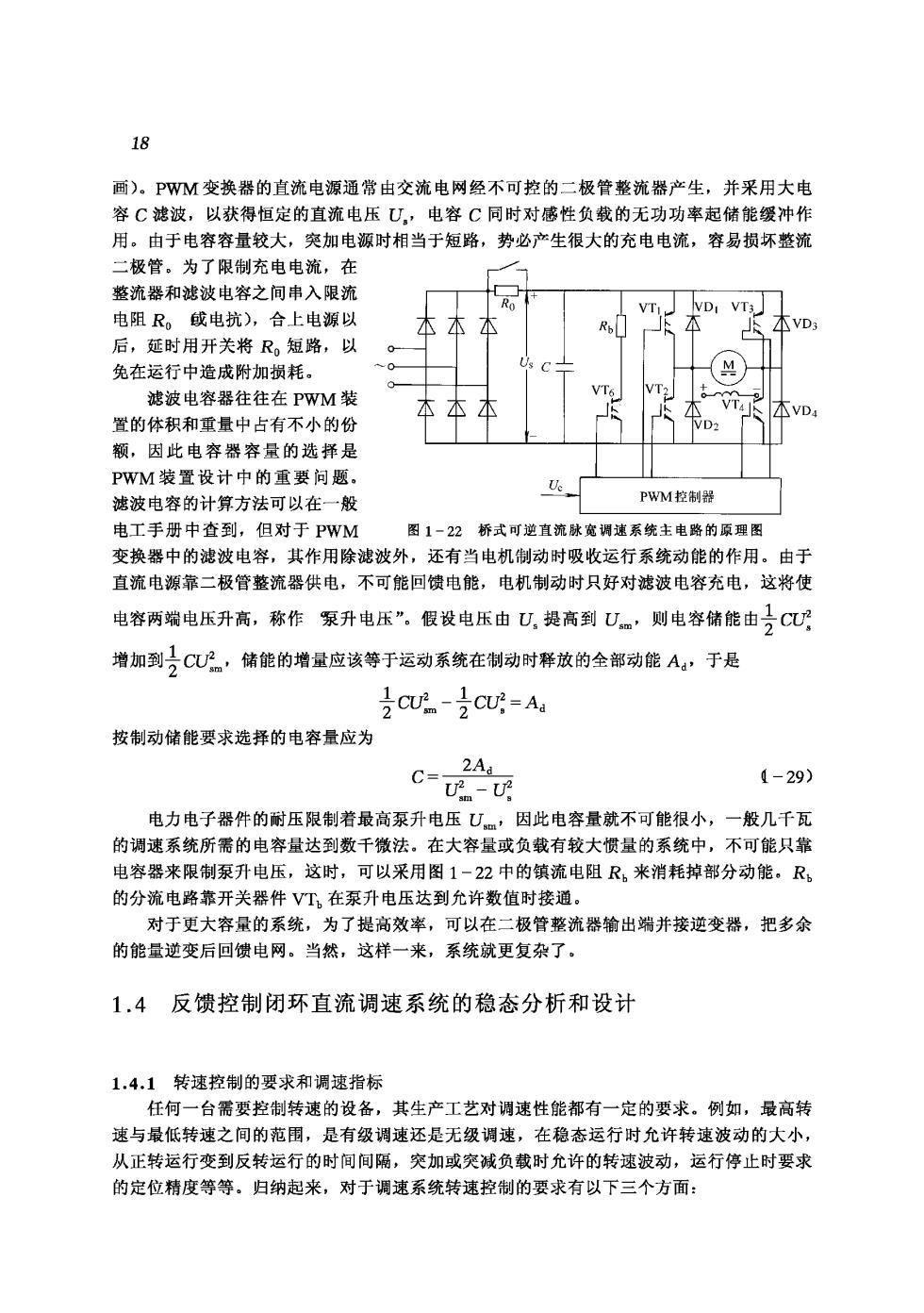
18 画),PWM变换器的直流电源通常由交流电网经不可控的二极管整流器产生,并采用大电 容C滤波,以获得恒定的直流电压U,电容C同时对感性负载的无功功率起储能缓冲作 用。由于电容容量较大,突加电源时相当于短路,势必产生很大的充电电流,容易损坏整流 二极管。为了限制充电电流,在 整流器和滤波电容之间串入限流 电阻R。线电抗),合上电源以 VD:VT3 VD 后,延时用开关将R。短路,以 免在运行中造成附加损耗。 滤波电容器往往在PWM装 置的体积和重量中占有不小的份 /D 额,因此电容器容量的选择是 PWM装置设计中的重要问题 滤波电容的计算方法可以在一般 PWM控制器 电工手册中查 ,但对于WM 图1-22桥式可地直流脉宽调速系统主电路的原理图 变换器中的滤波电容,其作用除滤波外,还有当电机制动时吸收运行系统动能的作用。由于 直流电源靠二极管整流器供电,不可能回馈电能,电机制动时只好对滤波电容充电,这将使 电容两端电压升高,称作升电压”.假设电压由U,提高到U,则电容储能由CU 增加到】CU?,储能的增量应该等于运动系统在制动时释放的全部动能A,于是 cU-CU:-A. 按制动储能要求选择的电容量应为 c- 4-29) 电力电子器件的耐压限制若最高泵升电压U,。,因此电容量就不可能很小,一般几千瓦 的调速系统所需的电容量达到数千微法,在大容量或负载有较大惯量的系统中,不可能只靠 电容器来限制泵升电压,这时,可以采用图1一22中的镇流电阻R。来消耗掉部分动能。R 的分流电路靠开关器件V工,在泵升电压达到允许数值时接通 对于更大容量的系统,为了提高效率,可以在二极管整流器输出端并接逆变器,把多余 的能量逆变后回馈电网。当然,这样一米,系统就更复杂了, 1.4反馈控制闭环直流调速系统的稳态分析和设计 1.4.1转速控制的要求和调速指标 任何一台需要控制转速的设备,其生产工艺对谓速性能都有一定的要求。例如,最高转 速与最低转速之间的范围,是有级调速还是无级调速,在稳态运行时允许转速波动的大小, 从正转运行变到反转运行的时间间隔,突加或突减负载时允许的转速波动,运行停止时要求 的定位精度等等。归纳起来,对于调速系统转速控制的要求有以下三个方面
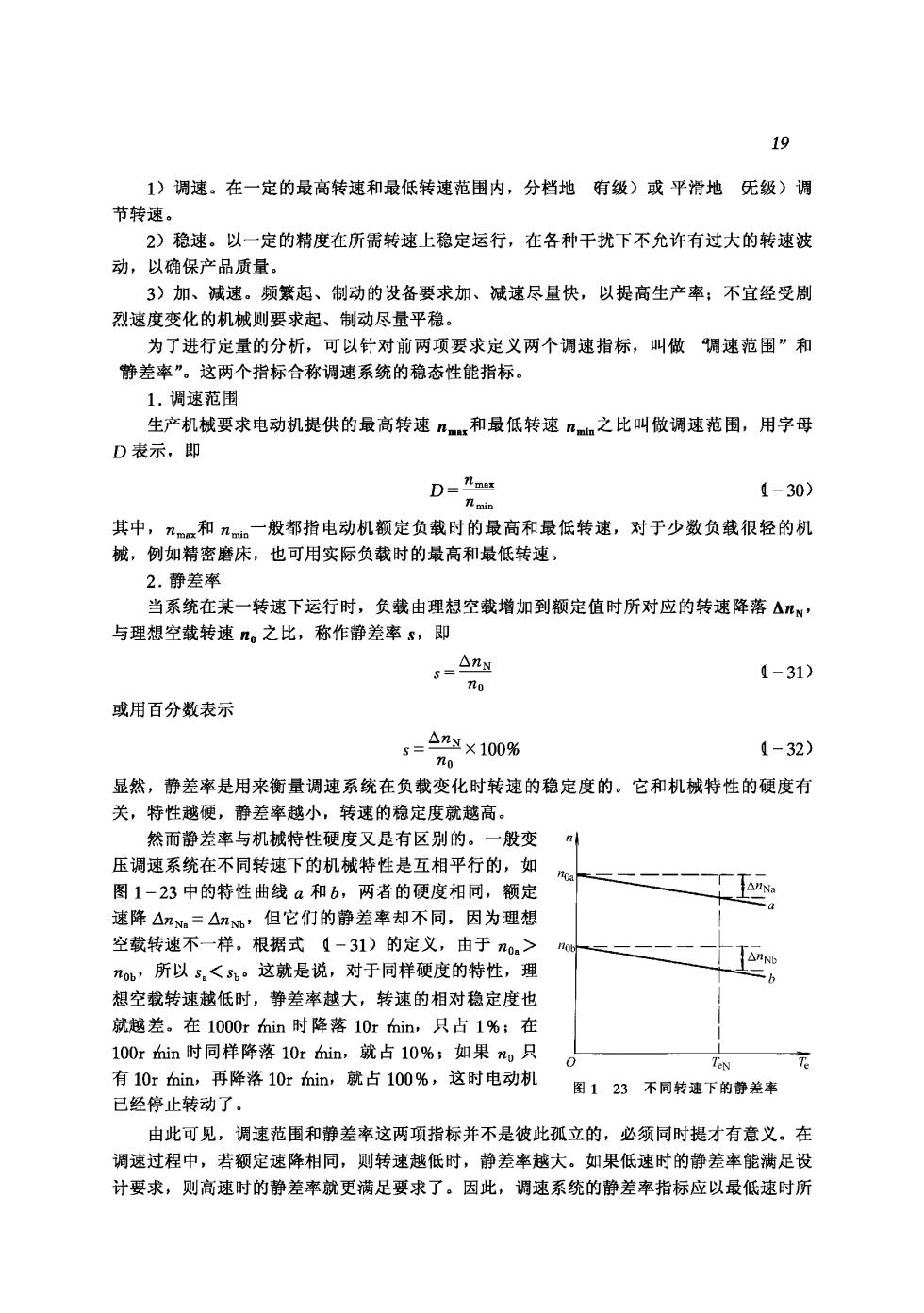
19 1)调速。在一定的最高转速和最低转速范围内,分档地有级)或平滑地无级)调 节转速。 2)稳速。以一定的精度在所需转速上稳定运行,在各种干扰下不允许有过大的转速波 动,以确保产品质量。 3)加、减速。频繁起、制动的设备要求加、减速尽量快,以提高生产率:不宜经受剧 烈速度变化的机械则要求起、制动尽量平稳。 为了进行定量的分析,可以针对前两项要求定义两个调速指标,叫做调速范围”和 静差率”。这两个指标合称调速系统的稳态性能指标。 1.调速范围 生产机械要求电动机提供的最高转速m和最低转速之比叫做调速范围,用字母 D表示,即 1-30) 中, 和 一般都指电动机额定负载时的最高和最低转速,对于少数负载很轻的机 械,例如精密磨床,也可用实际负载时的最高和最低转速。 2.静差率 当系统在某一转速下运行时,负载由理想空载增加到额定值时所对应的特速降落△, 与理想空载转速几。之比,称作静差率s,即 s=△ny 1-31) 7n0 或用百分数表示 -×10% 1-32) 显然,静差率是用来衡量调速系统在负载变化时转速的稳定度的。它和机械特性的硬度有 关,特性越硬,静差率越小,转速的稳定度就越高。 然而静差率与机械特性硬度又是有区别的。一般变 压调速系统在不同转速下的机械特性是互相平行的,如 图1-23中的特性曲线a和b,两者的硬度相同,额定 速降△nN =△n ,但它们的静差率却不同,因为理想 空载转速不一样。根据式1-31)的定义,由于n0.> n,所以5,<s。这就是说,对于同样硬度的特性,理 想空载转速越低时,静差常越大,转速的相对稳定度也 就越差。在1000rhin时降落10rhin,只占1%:在 100rhin时同样降落10rin,就占10%:如果只 有10rhin,再降落10rhin,就占100%,这时电动机 图1-23不同转速下的静差率 已经停止转动了, 由此可见,调速范围和静差率这两项指标并不是彼此孤立的,必须同时提才有意义。在 调速过程中,若额定速降相同,则转速越低时,静差率越大。如果低速时的静差率能满足设 计要求,则高速时的静差率就更满足要求了。因此,调速系统的静差率指标应以最低速时所
20 能达到的数值为准。 3.直流变压调速系统中调速范围、静差率和额定速降之间的关系 在直流电动机变压调速系统中, 一般以电动机的额定转速作为最高转速,若额定负 载下的转速降落为△N,则按照上面分析的结果,该系统的静差率应该是最低速时的静差 率。即 于是,最低转速为 m=As-n=直-Ay 而调速范围为 D=ms=花x 将上面的式代入,得 1-33) 式《3)表示变压调速系统的调速范形、静差率和颜定速降之间所应满足的关系。对于一 同一个调速系统,△N值一定,由式1-33)可见,如果对静差率要求越严,即要求s值 越小时,系统能够允许的调速范围也越小。一个调速系统的调速范围,是指在最低速时还能 满足所需静差率的转速可调范围。 例题1-1莱直流调速系统电动机额定转速为元N=1430ri,额定速降△N=115 ri,当要求静差率s≤30%时,允许多大的调速范围? 如果要求静差率$≤20%,则调速 范围是多少?如果希望调速范围达到10,所能满足的静差率是多少? 解要求s≤30%时,调速范围为 D-AWN 01m0X9 .3)=5.3 若要求s≤20%,则调速范圈只有 D=002=3.1 若调速范围达到10,则静差率只能是 D△n 10×115 5=N+D△m、=1430+10X15=0.446=44.6% 1.4.2开环调速系统及其存在的问题 图1-3所示的晶闸管-电动机系统和图1-22所示的可逆直流脉宽调速系统都是开环 调速系统,调节控制电压U。就可以改变电动机的转速。如果负载的生产工艺对运行时的静 差率要求不高,这样的开环调速系统都能实现一定范图内的无级调速,可以找到一些用途。 但是,许多需要调速的生产机械常常对静差率有一定的要求。例如龙门侧床,由于毛坯表面 粗糙不平,加工时负载大小常有波动,但是,为了保证工件的加工精度和加工后的表面光洁 度,加工过程中的速度却必须基本稳定,也就是说,静差率不能太大,一般要求,调速范围 D=20~40,静差率5≤5%。又如热连轧机,各机架轧辊分别由单独的电动机拖动,钢材
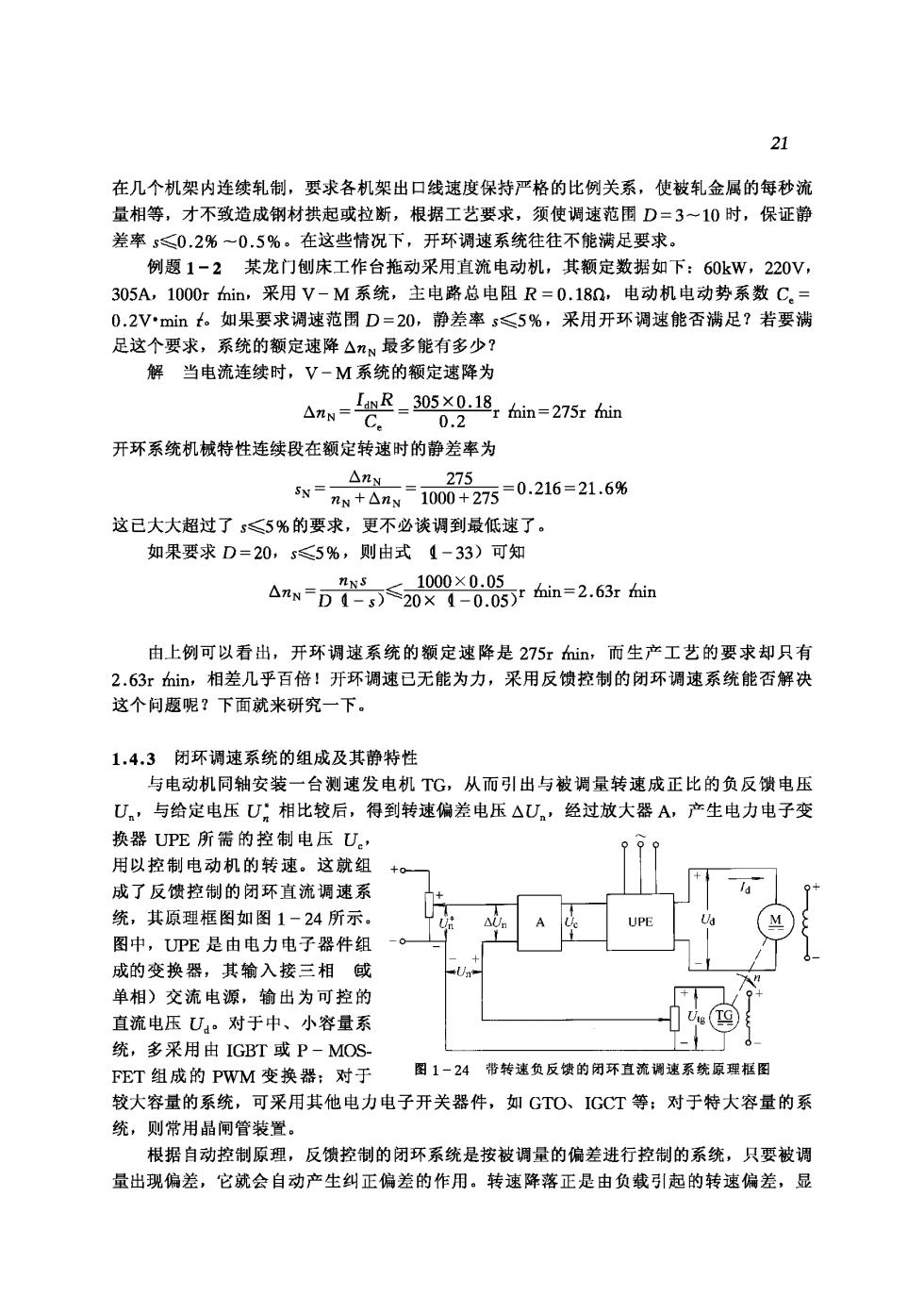
21 在几个机架内连续轧制,要求各机架出口线速度保持严格的比例关系,使被轧金属的每秒流 量相等,才不致造成钢材拱起或拉断,根据工艺要求,须使调速范围D=3~10时,保证静 差率≤0.2%一0.5%。在这些情况下,开环调速系统往往不能满足要求 例题1-2某龙门侧床工作台拖动采用直流电动机,其额定数据如下:60kW,220V, 305A,1000rhin,采用V-M系统,主电路总电阻R=0.18n,电动机电动势系数C. 0.2V·min。如果要求调速范围D=20,静差率s≤5%,采用开环调速能否满足?若要满 足这个要求,系统的额定速降△最多能有多少? 解当电流连续时,V-M系统的额定速降为 ns05x1 tin=275r hin 0.2 开环系统机械特性连续段在额定转速时的静差率为 wwn=10m3275=0.216=21.6% △、 这已大大超过了≤5%的要求,更不必谈调到最低速了。 如果要求D=20,5≤5%,则由式4-33)可知 1000×0.05 An-D0.05)fhin-2.63r fhin 由上例可以看出,开环调速系统的额定速降是275ri,而生产工艺的要求却只有 2.63rhin,相差几乎百倍!开环调速已无能为力,采用反馈控制的闭环调速系统能否解决 这个问题呢?下面就来研究一下. 1.4.3闭环调速系统的组成及其静特性 与电动机同轴安装一台测速发电机TG,从而引出与被调量转速成正比的负反馈电压 U。,与给定电压U:相比较后,得到转速偏差电压△U。,经过放大器A,产生电力电子变 换器UPE所需的控制电压U。 用以控制电动机的转速。这就组 成了反馈控制的闭环直流调速系 统,其原理框图如图1-24所示 图中,UPE是由电力电子器件组 成的变换器,其输入接三相或 单相)交流电源,输出为可控的 + 直流电压U。对于中、小容量系 统,多采用由IGBT或P-MOS FET组成的PWM变换器:对于 图1-24带转速负反馈的闭环直流调速系绕原理框图 较大容量的系统,可采用其他电力电子开关器件,如GTO、IGCT等:对于特大容量的系 统,则常用晶闸管装置。 根据自动控制原理,反馈控制的闭环系统是按被调量的偏差进行控制的系统,只要被调 量出现偏差,它就会自动产生纠正偏差的作用。转速降落正是由负载引起的转速偏差,显
22 然,闭环调速系统应该能够大大减少转速降落。 下面分析闭环调速系统的稳态特性,以确定它如何能够减少转速降落。为了突出主要矛 盾,先作如下的假定 1)忽略各种非线性因素,假定系统中各环节的输入一输出关系都是线性的,或者只取 其线性工作段。 2)忽略控制电源和电位器的内阻。 这样,图1一24所示的转速负反馈直流调速系统中各环节的稳态关系如下: 电压比较环节 △U.=U-U. 放大器 U.=K△Ua 电力电子变换器 Ua=K,U. 调速系统开环机械特性 n=Ua -IR C. 测速反馈环节 U=an 以上各关系式中 K 放大器的电压放大系数: K,- 一电力电子变换器的电压放大系数 转速反馈系数minD: -电力申子变换器理想空载输出申压)变换器内阻已并入电椒回路总电阻尺中)。 从上述五个关系式中消去中间变量,整理后,即得转速负反馈闭环直流调速系统的静特 性方程式 k路ck KK.U-IR 4-34) 其中,KK,K口,称做闭环系统的开环放大系数,它相当于在测速反馈电位器输出端把 反馈回路断开后,从放大器输入起直到测速反馈输出为止总的电压放大系数,是各环节单独 的放大系数的乘积。须注意,这里是以君=己作为电动机环节放大系数的。 闭环调速系统的静特性表示闭环系统电动机转速与负载电流戗转矩)间的稳态关系 它在形式上与开环机械特性相似,但本质上却有很大不同,故定名为静特性”,以示区别。 根据各环节的稳态关系式可以画出闭环系统的稳态结构框图,如图1-25所示,图中 各方框内的文字符号代表该环节的放大系数。运用结构图运算法同样可以推出式1一34) 所表示的静特性方程式,方法如下:将给定量U。和扰动量-【:R看成是两个独立的输入 量,先按它们分别作用下的系统如图1-25b、c所示)求出各自的输出与输入关系式,由 于已认为系统是线性的,可以把二者叠加起来,即得系统的静特性方程式 1.4.4开环系统机械特性和闭环系统静特性的关系 比较一下开环系统的机械特性和闭环系统的静特性,就能消楚地看出反馈闭环控制的优 越性。 如果断开反馈回路,则上述系统的开环机械特性为