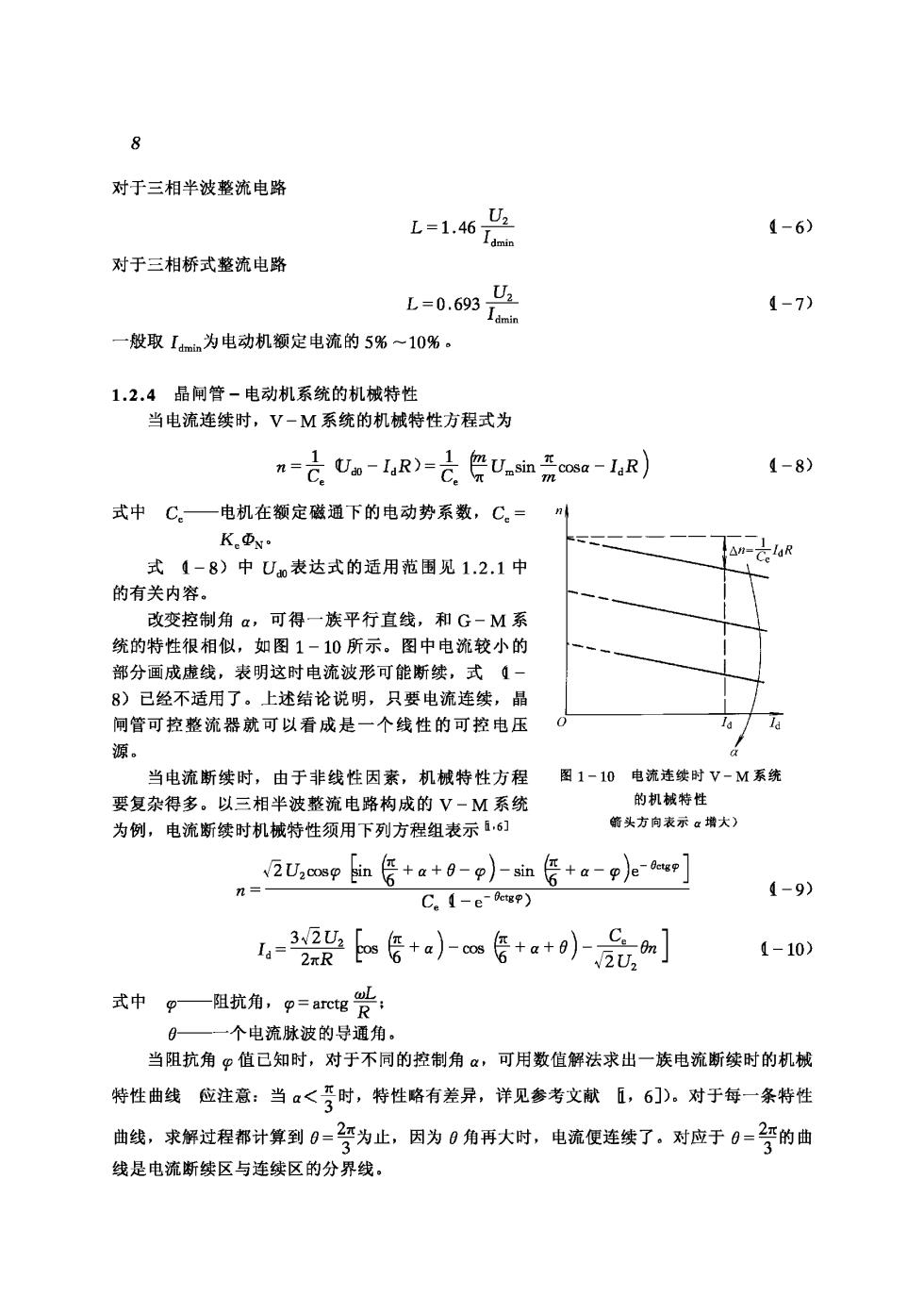
对于三相半波整流电路 L=1.46巴 4-6) 对于三相桥式整流电路 L=0.6932 4-7) 般取【为电动机额定电流的5%~10%。 1.2.4晶闸管-电动机系统的机械特性 当电流连续时,V一M系统的机械特性方程式为 n-C Ua-I,R)-C Usin mcna-I,R) 4-8) 式中C。一电机在额定磁通下的电动势系数,C。= 行 K.Dx 4R 式4-8)中Um表达式的适用范围见1.2.1中 的有关内容。 改变控制角a,可得一族平行直线,和G-M系 统的特性很相似,如图1-10所示。图中电流较小的 部分画成滤线,表明这时电流波形可能断续,式( 8)已经不适用了。上述结论说明,只要电流连续,晶 闸管可控整流器就可以看成是一个线性的可控电压 源。 当电流断续时,由于非线性因素,机械特性方程 图1-10电流连续时V-M系绕 要复杂得多。以三相半波整流电路构成的V-M系统 的机械特栏 为例,电流断续时机械特性须用下列方程组表示,6] 能头方向表示a塘大 2U,ospm倍+a+0-p)-sin凭+a-p)eae】 n C。1-eP) 4-9) 4-22股长+小-m后+a+)-品a] 1-10) 式中p—阻抗角,p=actg, 一个电流脉波的导通角。 当阻抗角伞值已知时,对于不同的控制角α,可用数值解法求出一族电流断续时的机械 特性曲线应注意:当α<时,特性略有差异,详见参考文献1,6])。对于每一条特性 曲线,求解过程都计算到0=红为止,因为0角再大时,电流便连续了。对应于0=的曲 线是电流断续区与连续区的分界线
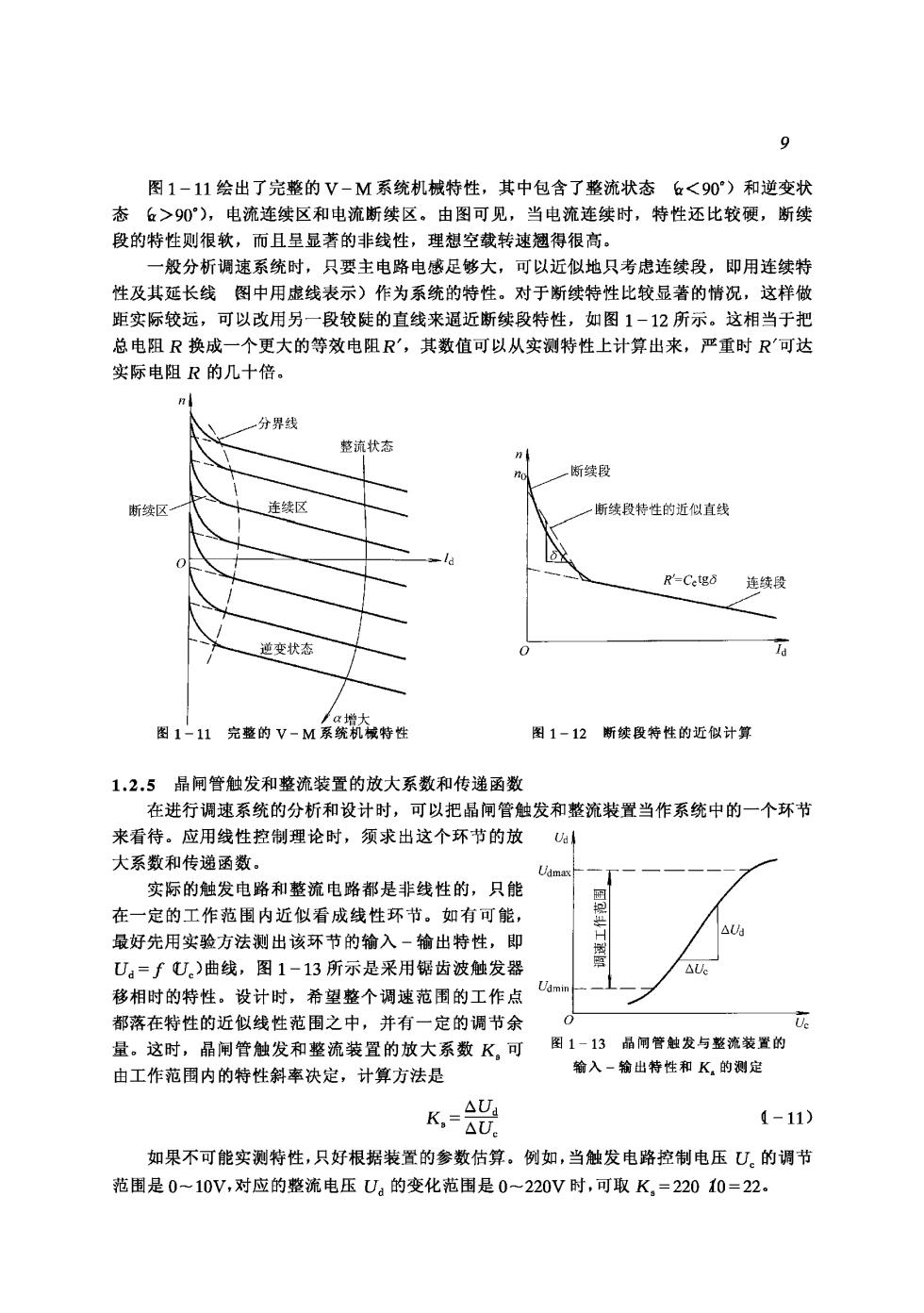
图1-11绘出了完整的V-M系统机械特性,其中包含了整流状态女<90)和逆变状 态6>90),电流连续区和电流断续区。由图可见,当电流连续时,特性还比牧硬,断续 段的特性则很软,而且呈显著的非线性,理想空载转速翘得很高。 一般分析调速系统时,只要主电路电感足够大,可以近似地只考虑连续段,即用连续特 性及其延长线图中用虚线表示)作为系统的特性。对于断续特性比较显著的情况,这样做 距实际较远,可以改用另一段较陡的直线来通近断续段特性,如图1-12所示。这相当于托 总电阻R换成一个更大的等效电阻R',其数值可以从实测特性上计算出来,严重时R可达 实际电阻R的几十倍。 一分界线 整流状态 一断续段 断埃区 连线区 一断缕段转性的近似直线 RCg8违续段 逆变状态 图1二1完整的V-M系统机碱特性 图1一12断装段特性的近似计算 1,2.5晶闸管触发和整流装置的放大系数和传递函数 在进行调速系统的分析和设计时,可以把品闸管触发和整流装置当作系统中的一个环节 来看待。应用线性控制理论时,须求出这个环节的放 大系数和传递函数。 实标的触发电路和整流电路都是非线性的,只能 在一定的工作范围内近似看成线性环节。如有可能, 最好先用实验方法测出该环节的输入 输出特性,即 U:=fU)曲线,图1-13所示是采用锯齿波触发器 △U 移相时的特性。设计时,希望整个调速范围的工作点 都落在特性的近似线性范围之中,并有一定的调节余 量。这时,晶闸管触发和整流装置的放大系数K,可 图1 -13品闸管触发与整流装置的 由工作范围内的特性斜率决定,计算方法是 输入一输出特性和K,的测定 K,=△U 4-11) 如果不可能实测特性,只好根据装置的参数估算。例如,当触发电路控制电压U。的调节 范围是0一10V,对应的整流电压U。的变化范围是0一220V时,可取K,=22010=22
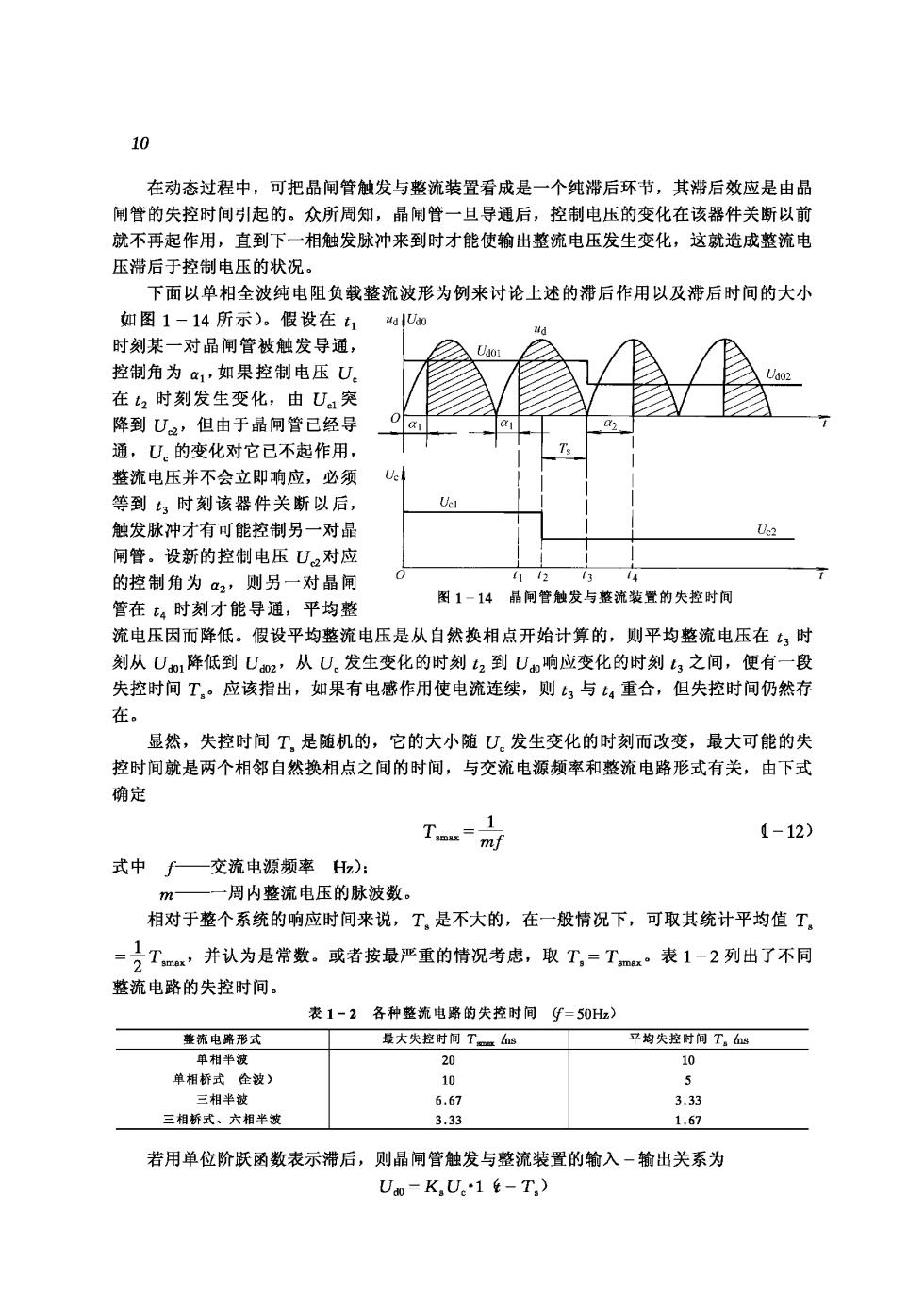
10 在动态过程中,可把晶闸管触发与整流装置看成是一个纯滞后环节,其滞后效应是由晶 闸管的失控时间引起的。众所周知,晶闸管一旦导通后,控制电压的变化在该器件关断以前 就不再起作用,直到下一相触发脉冲来到时才能使输出整流电压发生变化,这就造成整流电 压滞后于控制电压的状况。 下面以单相全波纯电阻负载整流波形为例来讨论上述的滞后作用以及滞后时间的大小 如图1-14所示)。假设在 时刻某一对晶闻管被触发导通 控制角为a1,如果控制电压U 在2时刻发生变化,由U突 降到U2,但由于晶闸管已经导 通,U。的变化对它已不起作用, 整流电压并不会立即响应,必须 等到3时刻该器件关断以后, 触发脉冲才有可能控制另 一对品 闸管。设新的控制电压U2对应 的控制角为a2:则另一对晶闸 管在4时刻才能导通,平均 图1-14晶阳管触发与鉴流装置的失控时间 流电压因而降低。假设平均整流电压是从自然换相点开始计算的,则平均整流电压在幻时 刻从U降低到U从U.发生变化的时刻2到Um响应变化的时刻之间,便有一段 失控时间T。应该指出,如果有电感作用使电流连续,则3与4重合,但失控时间仍然存 在。 显然,失控时间T,是随机的,它的大小随U。发生变化的时刻而改变,最大可能的失 控时间就是两个相邻自然换相点之间的时间,与交流电源频率和整流电路形式有关,由下式 确定 T= 1-12 m 式中—交流电源频率z): 一周内整流电压的脉波数。 相对于整个系统的响应时间来说,T,是不大的,在一般情况下,可取其统计平均值T, =号Tm,并认为是常数。或者按最严重的情况考虑,取T,=Tm·表1-2列出了不同 整流电路的失控时间 表1-2各种整流电路的类控时间少=50出) 粹流电路形式 大尖控时间T 平均尖控时何T,a 单相半被 20 10 单相桥式全被) 10 6.67 33 若用单位阶跃函数表示滞后,则品闸管触发与整流装置的输入一输出关系为 Ua=K,U16-T,)
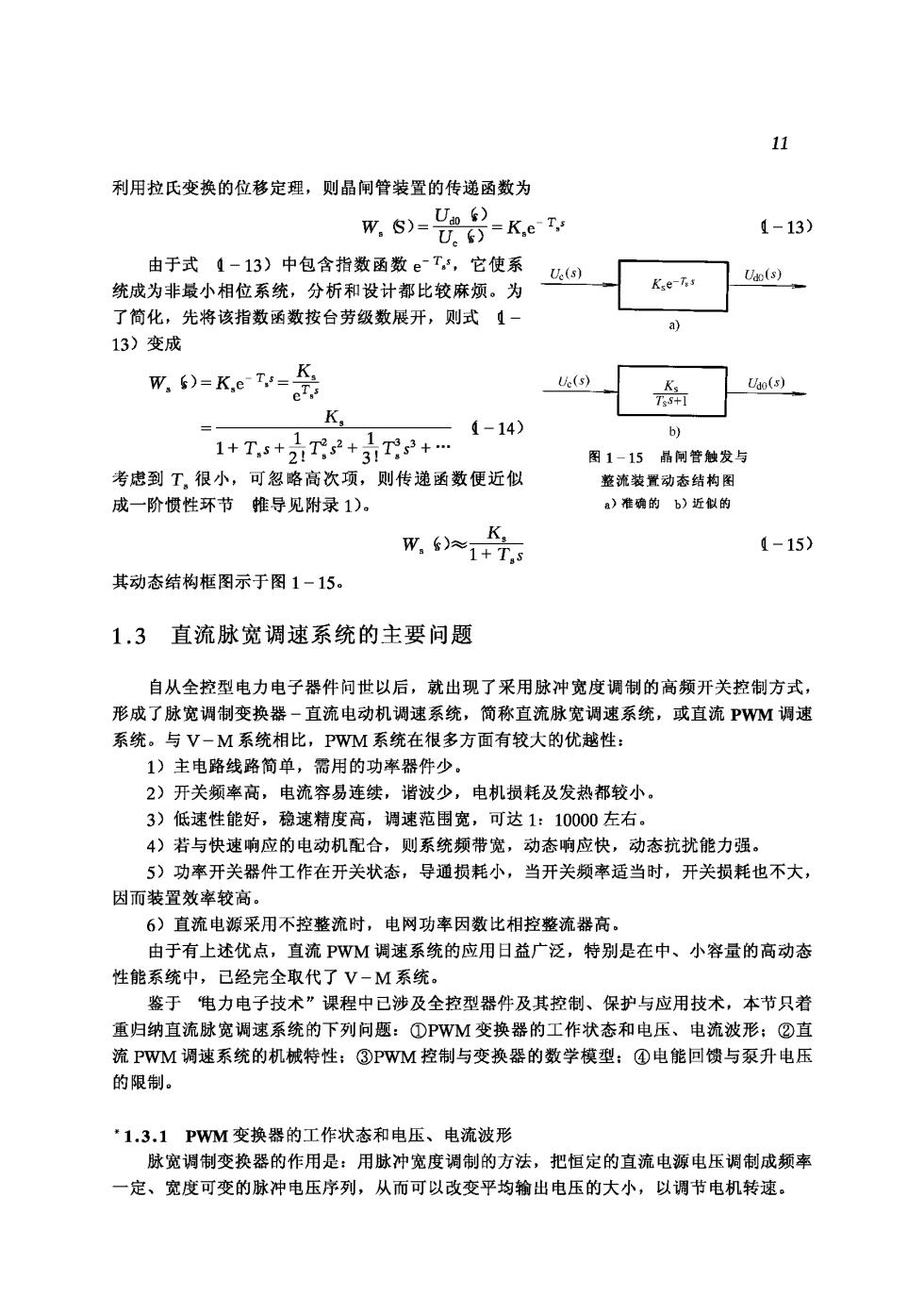
11 利用拉氏变换的位移定理,则晶闸管装置的传递函数为 ws)=号号=Ke 1-13) 由于式1-13)中包含指数函数eT,它使系 统成为非最小相位系统,分析和设计都比较麻烦。为 Kse-Ts (s) 了简化,先将该指数函数按台劳级数展开,则式1 13)变成 W.6)-K.eT- (s) 品 tao(s) K 1+T.s+2T2+r2+ 4-14) 图1-15晶间管触发与 考虑到T,很小,可忽略高次项,则传递函数便近似 整流装置动态结构图 成一阶惯性环节惟导见附录1)。 a》准确的b》近似的 现 1-15) 其动态结构框图示于图1-15。 1.3直流脉宽调速系统的主要问题 自从全控型电力电子器件问世以后,就出现了采用脉冲宽度调制的高频开关控制方式, 形成了脉宽调制变换器一直流电动机调速系统,简称直流脉宽调速系统,或直流PWM调速 系统。与V-M系统相比,PWM系统在很多方面有较大的优越性: 1)主电路线路简单,需用的功率器件少, 2)开关频率高,电流容易连续,谐波少,电机损耗及发热都较小。 3)低速性能好,稳速箱度高,调速范围宽,可达1:10000左右. 4)若与快速响应的电动机配合,则系统频带宽,动态响应快,动态抗扰能力强。 5)功率开关器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也不大, 因而装置效率较高 6)直流电源采用不控整流时,电网功率因数比相控整流器高。 由于有上述优点,直流PWM调速系统的应用日益广泛,特别是在中、小容量的高动态 性能系统中,已经完全取代了V-M系统 鉴于电力电子技术”课程中已涉及全控型器件及其控制、保护与应用技术,本节只着 重归纳直流脉宽调速系统的下列问题:①PWM变换器的工作状态和电压、电流波形:②直 流PWM调速系统的机械特性:③PWM控制与变换器的数学模型:④电能回馈与泵升电压 的限制。 ·1.3.1PWM变换器的工作状态和电压、电流波形 脉宽调制变换器的作用是:用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率 一定、宽度可变的脉冲电压序列,从而可以改变平均输出电压的大小,以调节电机转速
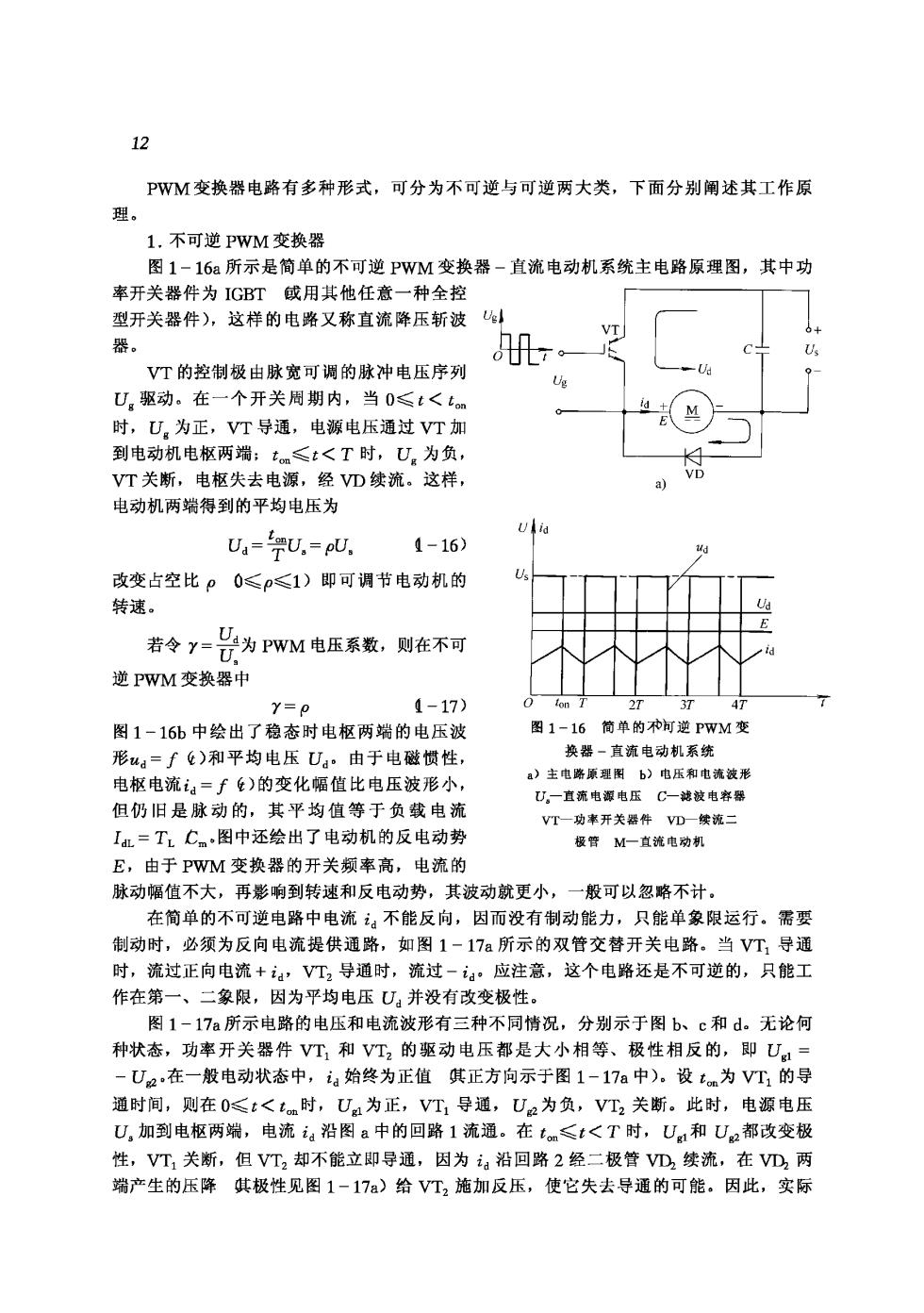
12 PWM变换器电路有多种形式,可分为不可逆与可逆两大类,下面分别阐述其工作原 理。 1.不可逆PWM变换器 图1-16a所示是简单的不可逆PWM变换器-直流电动机系统主电路原理图,其中功 率开关器件为1GBT戗用其他任意一种全控 型开关器件),这样的电路又称直流降压斩波 器。 r. VT的控制极由脉宽可调的脉冲电压序列 U,驱动。在一个开关周期内,当0≤t<t 时,订为正,T导通,电源电压通过VT 到电动机电枢两端:tm≤t<T时,U,为负 VT关断,电枢失去电源,经VD续流。这样, 电动机两端得到的平均电压为 U4="U,=pU, 1-16) 改变占空比p0≤P≤1)即可调节电动机的 结速。 若令Y=号为PwM电压系数,则在不可 逆PWM变换器中 4-17) 0元 图1-16b中绘出了稳态时电枢两端的电压波 图1-16简单的和逆PWM变 形w阳=∫)和平均电压Ua。由于电磁惯性, 换器一直流电动机系统 原用 电枢电流i妇=∫)的变化幅值比电压波形小, 电压C一议电客琴 但仍旧是脉动的,其平均值等于负载电流 I=TLC图中还绘出了电动机的反电动势 E,由于PWM变换器的开关频率高,电流的 脉动幅值不大,再影响到转速和反电动势,其波动就更小,一般可以忽略不计。 在简单的不可逆电路中电流:不能反向,因而没有制动能力,只能单象限运行。需要 制动时,必须为反向电流提供通路,如图1一17a所示的双管交替开关电路。当V工,导通 时,流过正向电流+ia,VT,导通时,流过-ia,应注意,这个电路还是不可逆的,只能工 作在第一、二象限,因为平均电压U并没有改变极性。 图1一17a所示电路的电压和电流波形有三种不同情况,分别示于图b、c和d。无论何 种状态,功率开关器件VT,和VT2的驱动电压都是大小相等、极性相反的,即U。 U2在一般电动状态中,a始终为正值其正方向示于图1-17a中).设tm为VT的 通时间,则在0≤t<t时,Ua为正,VT导通,U2为负,VT2关断。此时,电源电压 U,加到电枢两端,电流ia沿图a中的回路1流通。在tm≤t<T时,Ua和U都改变极 性,VT1关断,但VT2却不能立即导通,因为i:沿回路2经二极管VD2续流,在VD2两 端产生的压降其极性见图1-17a)给VT2施加反压,使它失去导通的可能。因此,实际