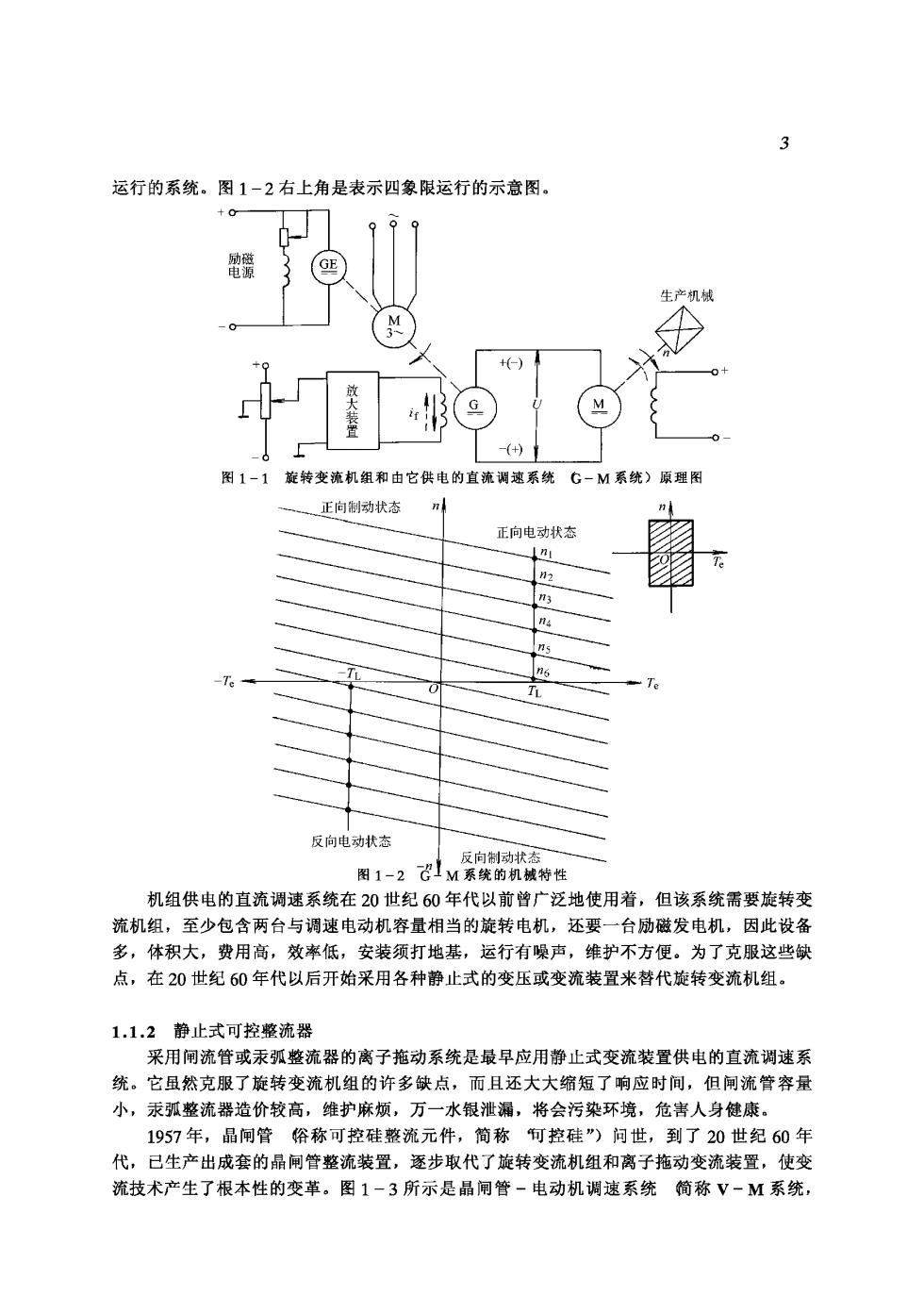
3 运行的系统。图1一2右上角是表示四象限运行的示意图。 + 图1-1旋转变流机组和由它供电的直流调速系姚℃-M系统)原理图 一正向制动状态 正向电动状态 反向电动状态 图1-2M的 机组供电的直流调速系统在20世纪60年代以前曾广泛地使用着,但该系统需要旋转变 流机组,至少包含两台与调速电动机容量相当的旋转电机,还要一台励磁发电机,因此设备 多,体积大,费用高,效率低,安装须打地基,运行有噪声,维护不方便。为了克服这些缺 点,在20世纪60年代以后开始采用各种静止式的变压或变流装置来替代旋转变流机组。 1.1.2静止式可控整流器 采用闸流管或汞弧整流器的离子拖动系统是最早应用静止式变流装置供电的直流调速系 统。它且然克服了旋转变流机组的许多缺点,而目还大大缩短了响应时间,但闻流管容录 小,汞弧整流器造价较高,维护麻烦,万一水银泄漏,将会污染环境,危害人身健康 1957年,晶闸管俗称可控硅整流元件,简称可控硅”)问世,到了20世纪60年 代,已生产出成套的晶闸管整流装置,逐步取代了旋转变流机组和离子拖动变流装置,使变 流技术产生了根本性的变革。图1一3所示是晶闸管-电动机调速系统简称V-M系统
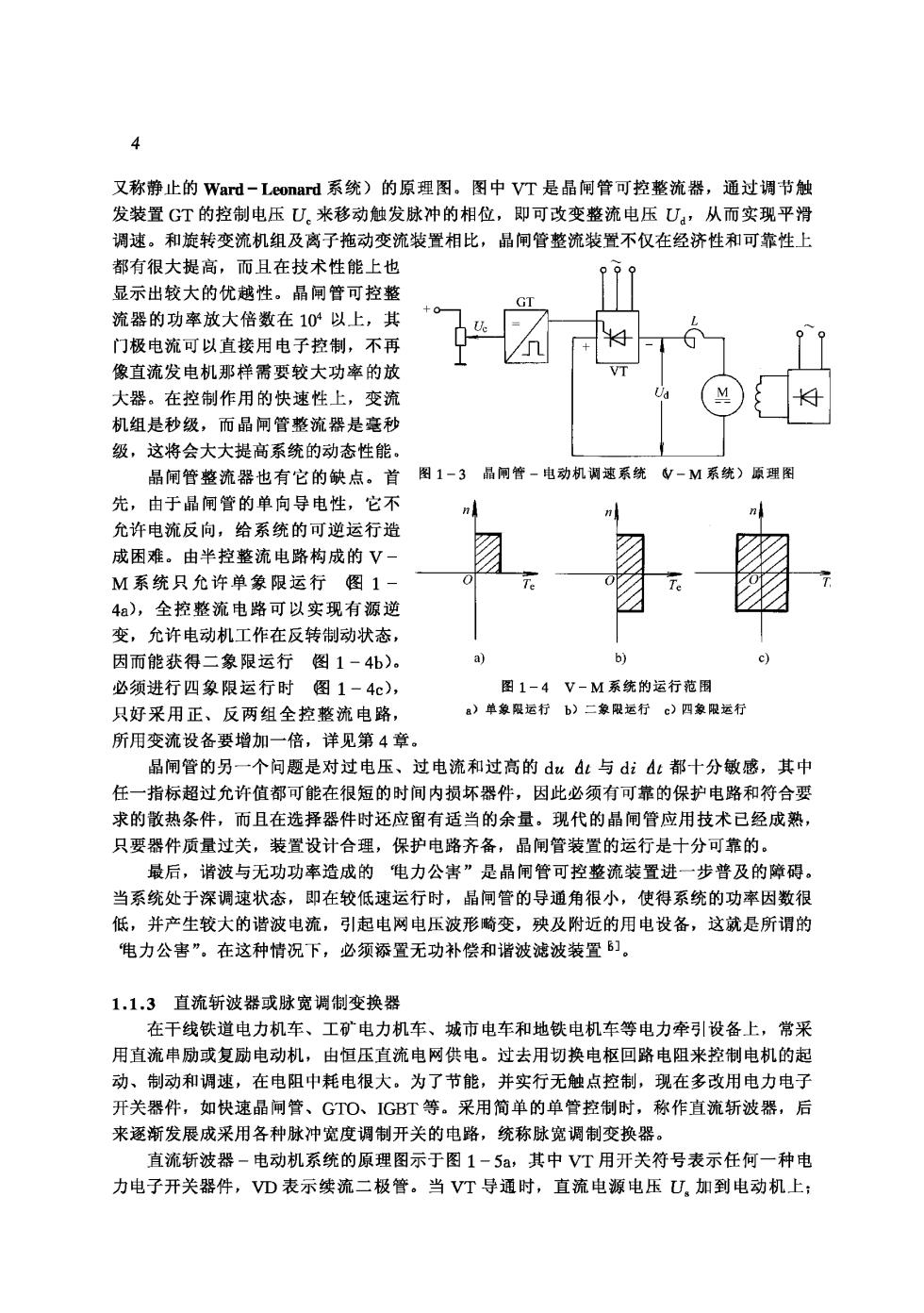
又称静止的Ward-Leonard系统)的原理图,图中VT是晶闻管可控整流器,通过调节能 发装置GT的控制电压U。来移动触发脉冲的相位,即可改变整流电压U,从而实现平滑 调速。和旋转变流机组及离子拖动变流装置相比,晶闸管整流装置不仅在经济性和可靠性上 都有很大提高,而且在技术性能上也 099 显示出较大的优核性。品闸管可控整 流器的功率放大倍数在10以上,其 门极电流可以直接用电子控制,不再 像直流发电机那样需要较大功率的放 大器。在控制作用的快速性上,变流 机组是秒级,而品闸管整流琴是熹秒 级,这将会大大提高系统的动态性能 晶闸管整流器也有它的缺点。首 图1-3 -电动机调速系统了-M系统)原理图 先,由于晶闻闸管的单向导电性,它不 允许电流反向,给系统的可逆运行造 成困难。由半控整流电路构成的V M系统只允许单象限运行图1 4a),全控整流电路可以实现有源逆 变,允许电动机工作在反转制动状态 因而能获得二象限运行图1-4b), 必须进行四象限运行时图1一4c) V-M系统的运行范 只好采用正、反两组全控整流电路, 象限运行 b)二象烈运行c)四象限运行 所用变流设备要增加一倍,详见第4章 品闸管的另一个问题是对过电压、过电流和过高的dud:与did:都十分敏感,其中 任一指标超过允许值都可能在很短的时间内损坏器件,因此必须有可靠的保护电路和符合要 求的散热条件, 而且在选择器件时还应留有适当的余量。现代的晶闸管应用技术已经成熟 只要器件质量过关,装置设计合理,保护电路齐备,晶闸管装置的运行是十分可靠的。 最后,谐波与无功功率造成的电力公害”是晶闸管可控整流装置进一步普及的意碍。 当系统处于深调速状态,即在较低速运行时,晶闸管的导通角很小,使得系统的功率因数很 低,并产生较大的谐波电流,引起电网电压波形畸变,决及附近的用电设备,这就是所谓的 电力公害”。在这种情况下,必须添置无功补偿和诺波滤波装置]。 1.1.3直流斩波器或脉宽调制变换器 在干线铁道电力机车、工矿电力机车、城市电车和地铁电机车等电力牵引设备上,常采 用直流串励或复励电动机,由恒压直流电网供电。过去用切换电枢回路电阻来控制电机的起 动、制动和调速,在电阻中耗电很大,为了节能,并实行无触点控制,现在多改用电力电子 开关器件,如快速晶闸管、GTD、IGBT等。采用简单的单管控制时,称作直流斩波器,后 来逐渐发展成采用各种脉冲宽度调制开关的电路,统称脉宽调制变换器。 直流斩被器-电动机系统的原理图示于图1一5a,其中VT用开关符号表示任何一种电 力电子开关器件,VD表示续流二极管。当VT导通时,直流电源电压U,加到电动机上
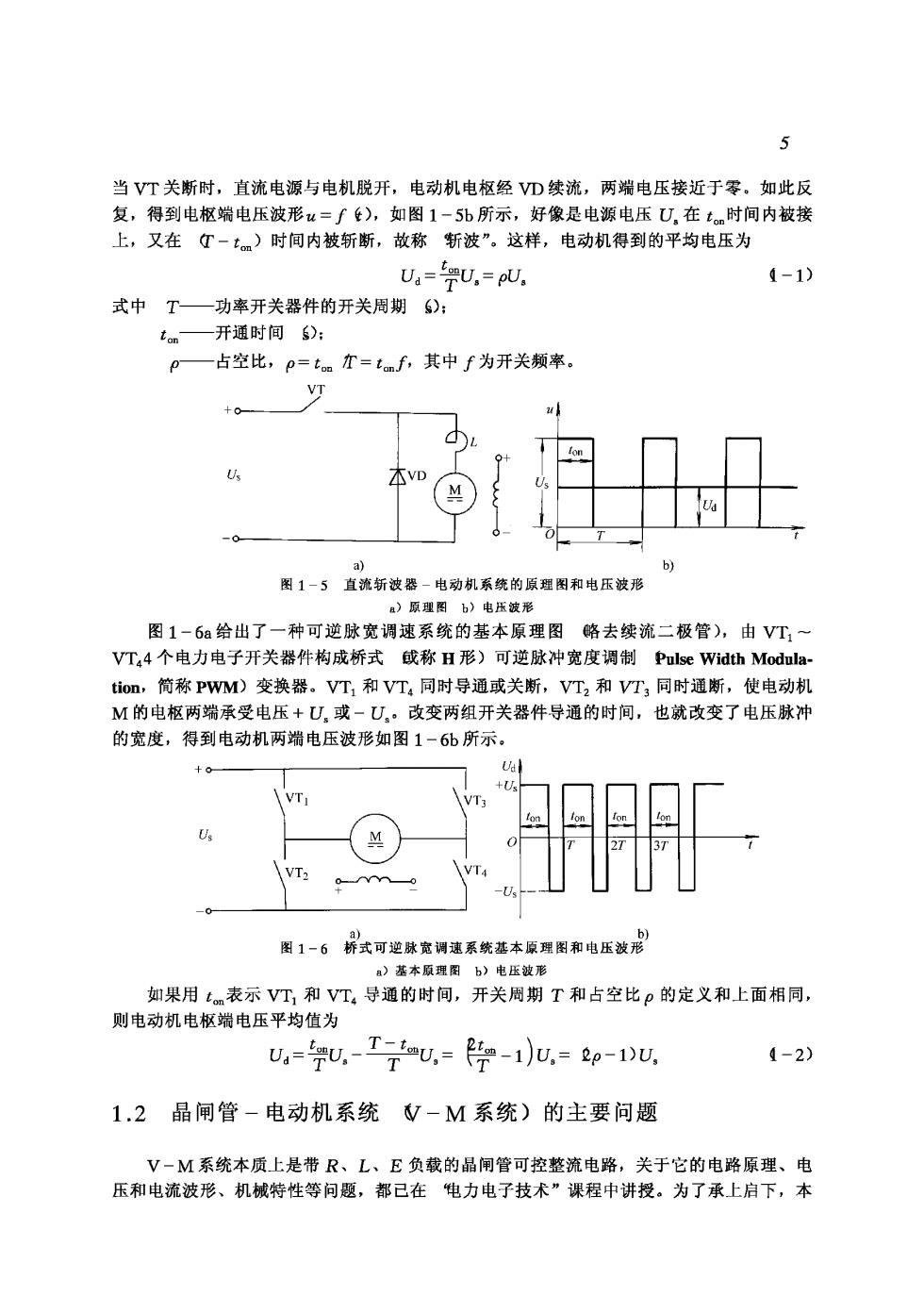
当VT关断时,直流电源与电机脱开,电动机电枢经VD续流,两端电压接近于零。如此反 复,得到电枢端电压波形u=∫),如图1一5b所示,好像是电源电压U,在tm时间内被接 上,又在 一)时间内被斩断, 故称新波”。这样,电动机得到的平均电压为 Ua=TU,=oU, 4-1) 式中 T 功率开关器件的开关周期): -开通时间): 占空比,p=t=t,其中f为开关频率 VT 图1-5直流新波器电动机系统的原理剧和电压波彦 图1-6a给出了一种可逆脉宽调速系统的基本原理图铬去续流二极管),由VT~ VTa4个电力电子开关器件构成桥式或称H形)可逆脉冲宽度调制Pulse Width Modula tio,简称PWM)变换器。VT和VT同时导通或关断,VT,和VT同时通断,使电动材 M的电枢两端承受电压+U,或-U。改变两组开关器件导通的时间,也就改变了电压脉冲 的宽度,得到电动机两端电压波形加图1一6私所示, VT - 图1一6桥式可逆脉宽调速系统基本原理困和电压被形 。)基本厦理图6)电压形 如果用t表示VT,和VT,导通的时间,开关周期T和占空比P的定义和上面相同, 则电动机电枢端电压平均值为 4=U,-TU,=-1)U,=o-1u, 4-2) 1.2晶闸管-电动机系统V-M系统)的主要问题 V一M系统本质上是带R、L、E负载的品闸管可控整流电路,关于它的电路原理、电 压和电流波形、机械特性等问题,都己在电力电子技术”课程中讲授。为了承上启下,本

节按照分析和设计直流调速系统的需要,重点归纳V一M系统的几个主要问题:①触发脉 冲相位控制:②电流脉动及其波形的连线与断线:③抑制电流脉动的措游;④V-M系统的 机械特性: ⑤品闸管触发和整流装置的放大系数和传递函数。 1.2.1敏发脉冲相位控制 在图1-3的V-M系统中,调节控制电压U。,从而移动触发装置GT输出脉冲的 位,即可方便地改变可控整流器VT输出舞时电压4:的波形,以及输出平均电压U:的数 值。如果把整流带骨内阳R移蓟带置外边,君 成是其负载电路电阻的一部分,那么,整流电压 便可以用其理想空载群时值u和平均值Un来表 示,相当于用图1-7所示的等效电路代替图1 3的实际主电路。这时,瓣时电压平衡方程式可 写作 图1-7V-M系统主电路的等效电路图 ua=E+iaR+L dia 4-3) 式中E -电动机反电动势): id 整流电流瞬时值A): L 主电路总电感由): R 主电路等效电阻Q),R=R+R,+R: 一整流装置内阻),包括整流器内部的电阻、整流器件正向压降所对应的电 阻、整流变压器漏抗换相压降相应的电阻; R。 电动机电枢电阻): R 平波电抗器电阻)。 对进行积分,即得理想空载整流电压平均值U· 用触发脉冲的相位角α控制整流电压的平均值U0是晶闸管整流器的特点。U与触发 脉冲相位角α的关系因整流电路的形式而异,对于一般的全控整流电路,当电流波形连续 时,Un=f)可用下式表示。 1-4) 式中 a 从自然换相点算起的触发脉冲控制角 U 一a=0时的整流电压被形峰伯): m- 交流电源一周内的整流电压脉波数 对于不同的落流电路,它们的数值见表1一1。 表1一1不同整流电路的整流电压波形蜂值、脉波数及平均流电压 流电路 单相全 三相半 三相全 六相半被 202 62 20 1.17U3co9 2.34 1.35 ①U2是流变压器二次侧定相电压的有数位
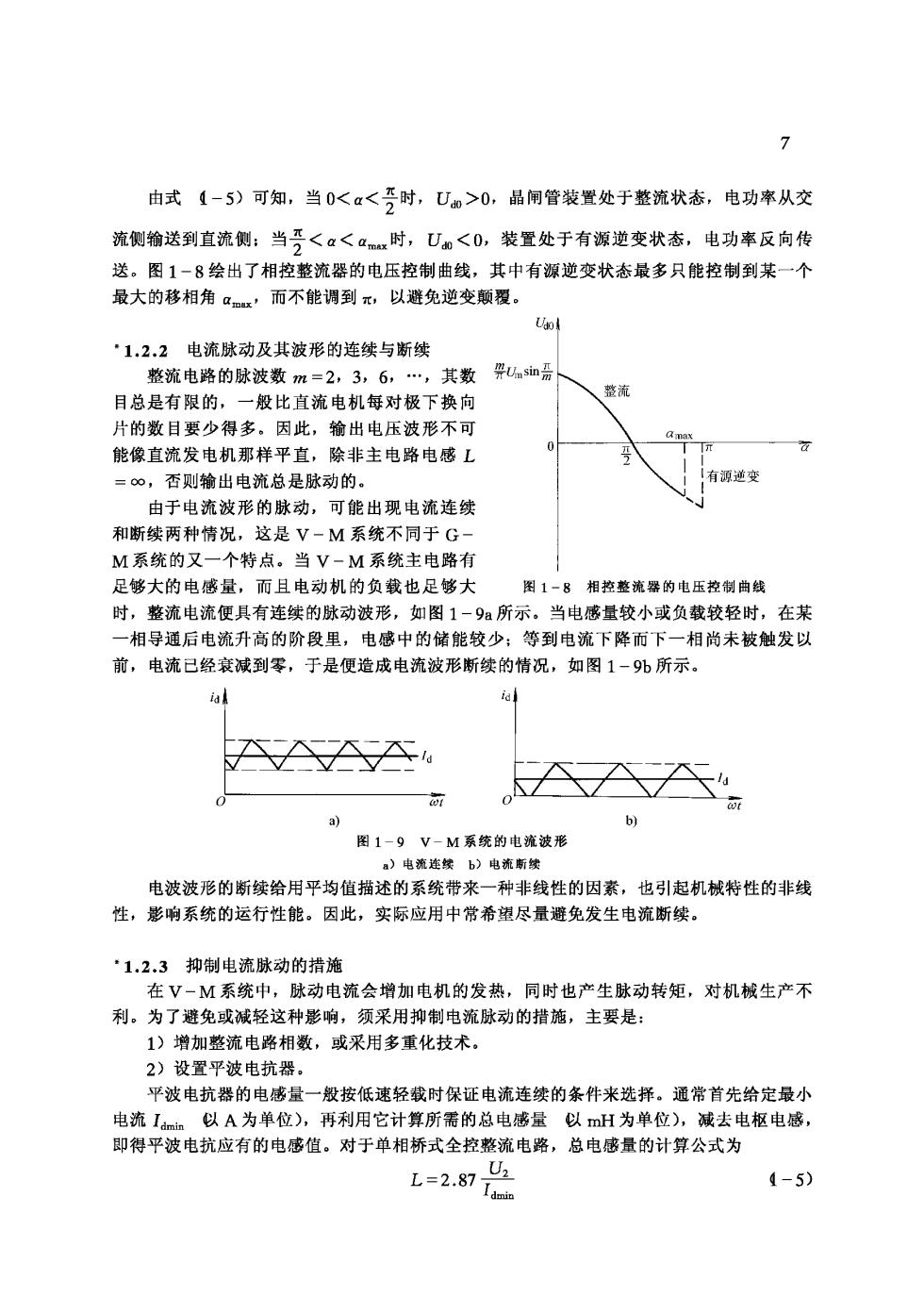
由式4-5)可知,当0<a<罗时,Um>0,晶闸管装置处于整流状态,电功率从交 流侧输送到直流侧:当牙<a<a时,U加<0,装置处于有源逆变状态,电功率反向传 送。图1一8绘出了相控整流器的电压控制曲线,其中有源逆变状态最多只能控制到某一个 最大的移相角x,而不能调到π,以避免逆变颠覆 1.2.2电流脉动及其波形的连续与断续 整流电路的脉波数m=2,3,6,·,其数 整流 目总是有限的,一般比直流电机每对极下换向 片的数目要少得多,因此,输出电压波形不可 能像直流发电机那样平直,除非主电路电感L =0,否则输出电流总是脉动的。 由于电流波形的脉动,可能出现电流连续 和断续两种情况,这是V一M系统不同于G M系统的又一个特点。当V-M系绕主电路有 足够大的电感量, 而且电动机的负载也足够大 图1一8相控整流的电压控制曲 时,整流电流便具有连续的脉动波形,如图1一9阳所示。当电感量较小或负载较轻时,在某 一相导通后电流升高的阶段里,电感中的储能较少;等到电流下降而下一相尚未被触发以 前,电流已经衰减到零,于是便造成电流波形断续的情况,如图1-9儿所示。 b 电波波形的断续给用平均值描述的系统带来一种非线性的因素,也引起机械特性的非线 性,影响系统的运行性能。因此,实际应用中常希范尽量避免发生电流断续。 1.2.3抑制电流脉动的措施 在V一M系统中,脉动电流会增加电机的发热,同时也产生脉动转矩,对机械生产不 利。为了避免或城经这种影响,须采用抑制电流脉动的措施,主要是: 1)增加整流电路相数,或采用多重化技术 2)设置平波电抗器。 平波电抗器的电感量一般按低速轻载时保正电流连续的条件来选择。通常首先给定最小 电流In 以A为单位),再利用它 计算所需的总电感量 以mH为单位),减去电枢电感, 即得平波电抗应有的电感值。对于单相桥式全控整流电路,总电感量的计算公式为 4-5)