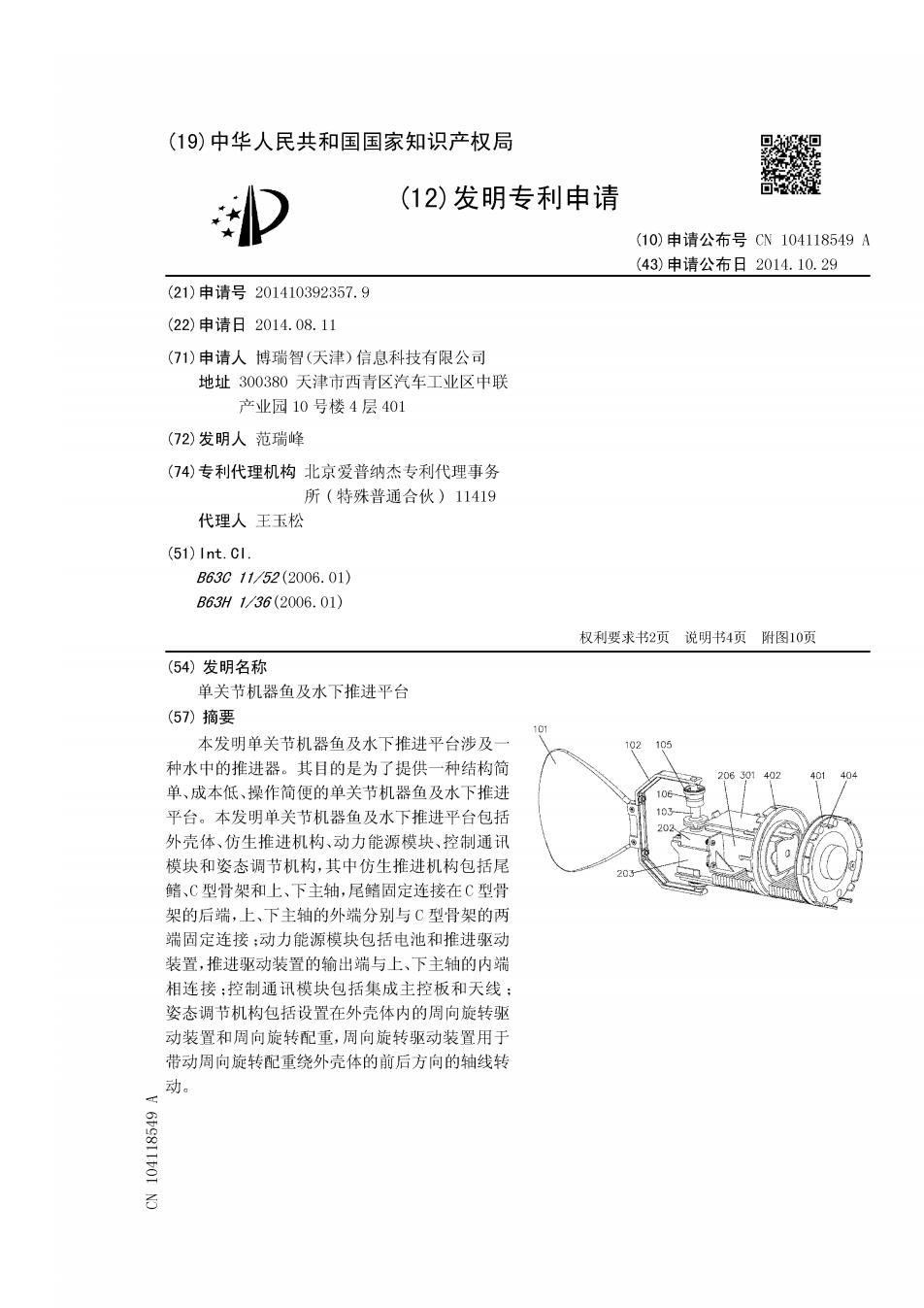
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN104118549A (43)申请公布日2014.10.29 (21)申请号201410392357.9 (22)申请日2014.08.11 (71)申请人博瑞智(天津)信息科技有限公司 地址300380天津市西青区汽车工业区中联 产业园10号楼4层401 (72)发明人范瑞峰 (74)专利代理机构北京爱普纳杰专利代理事务 所(特殊普通合伙)11419 代理人王玉松 (51)Int.CI. B63C1152(2006.01) B63H136(2006.01) 权利要求书2页说明书4页附图10页 (54)发明名称 单关节机器鱼及水下推进平台 (57)摘要 101 本发明单关节机器鱼及水下推进平台涉及一 105 种水中的推进器。其目的是为了提供一种结构简 208301402 401404 单、成本低、操作简便的单关节机器鱼及水下推进 平台。本发明单关节机器鱼及水下推进平台包括 外壳体、仿生推进机构、动力能源模块、控制通讯 模块和姿态调节机构,其中仿生推进机构包括尾 鳍、C型骨架和上、下主轴,尾鳍固定连接在C型骨 架的后端,上、下主轴的外端分别与C型骨架的两 端固定连接:动力能源模块包括电池和推进驱动 装置,推进驱动装置的输出端与上、下主轴的内端 相连接:控制通讯模块包括集成主控板和天线: 姿态调节机构包括设置在外壳体内的周向旋转驱 动装置和周向旋转配重,周向旋转驱动装置用于 带动周向旋转配重绕外壳体的前后方向的轴线转 动。 石
CN104118549A 权利要求书 1/2页 1.一种单关节机器鱼,包括外壳体、仿生推进机构、动力能源模块和控制通讯模块,其 特征在于:所述仿生推进机构包括尾鳍(101)、C型骨架(102)和上、下主轴(103、104),所 述C型骨架(102)的两端位于外壳体后部的上、下两侧,所述尾鳍(101)固定连接在C型骨 架(102)的后端,所述上、下主轴(103、104)的外端分别与C型骨架(102)的两端固定连接, 上、下主轴(103、104)的内端穿过外壳体后部的轴孔进入外壳体内:所述动力能源模块包 括电池(201)和推进驱动装置,所述电池(201)和推进驱动装置固定安装在外壳体内,所述 推进驱动装置的输出端与上、下主轴(103、104)的内端相连接,用于驱动上、下主轴(103、 104)往复旋转:所述控制通讯模块包括集成主控板(301)和天线(302),所述天线(302)固 定安装在外壳体上,所述集成主控板(301)固定在外壳体内: 所述机器鱼还包括姿态调节机构,所述姿态调节机构包括设置在外壳体内的周向旋转 驱动装置和周向旋转配重,所述周向旋转驱动装置用于带动周向旋转配重绕外壳体的前后 方向的轴线转动。 2.根据权利要求1所述的单关节机器鱼,其特征在于:所述周向旋转驱动装置包括前 固定环(401)、后固定环(402)和旋转部件,所述前固定环(401)和后固定环(402)相对 固定在外壳体的内壁上,前固定环(401)和后固定环(402)相对的面上开设有环形滑槽 (403),所述环形滑槽(403)内分别设置有滚轮,两个所述滚轮之间通过连接杆连接,所述 周向旋转配重安装在连接杆上,所述旋转部件安装在前固定环(401)或后固定环(402)上, 并与连接杆相连接。 3.根据权利要求1所述的单关节机器鱼,其特征在于:所述上、下主轴(103、104)穿过 外壳体的轴孔处固定安装有固定圈(105),所述固定圈(105)内侧的主轴上套装有弹性密 封圈(106),所述弹性密封圈(106)与固定圈(105)之间安装有弹性挡圈(107)。 4.根据权利要求1所述的单关节机器鱼,其特征在于:所述推进驱动装置为舵机 (202),所述舵机(202)通过舵机支架(203)固定安装在外壳体内,所述上主轴(103)的内 端固定连接有上卡盘(108),上卡盘(108)的下表面上设置有若千凸起(109),所述舵机 (202)的输出端上固定设置有下卡盘(204),所述下卡盘(204)的边缘上设置有若干与凸起 (109)相匹配的卡槽(205),所述上卡盘(108)与下卡盘(204)相贴合,所述若干凸起(109) 进入相对应的卡槽(205)内。 5.根据权利要求1所述的单关节机器鱼,其特征在于:所述电池(201)通过电池支架 (206)固定安装在外壳体内,所述集成主控板(301)固定安装在电池支架(206)上方。 6.根据权利要求1至5之一所述的单关节机器鱼,其特征在于:所述外壳体包括前壳 体(501)、后壳体(502)、螺纹套(503)和后盖(504),所述螺纹套(503)的内表面的前后 两端上分别设置有内螺纹,所述前壳体(501)的后端和后壳体(502)的前端分别设置有外 螺纹,前壳体(501)和后壳体(502)分别与螺纹套(503)的前后两端螺纹连接,所述后盖 (504)螺纹连接在后壳体(502)的后端,所述前壳体(501)的前端为半球体型。 7.根据权利要求6所述的单关节机器鱼,其特征在于:所述前固定环(401)和后固定 环(402)分别通过卡勾固定在前壳体(501)和后壳体(502)的内壁上,所述舵机支架(203) 通过卡勾和插槽结构固定在后壳体(502)的内壁上,所述电池支架(206)通过螺栓和插槽 结构固定在后壳体(502)的内壁上,所述集成主控板(301)通过螺栓和卡勾结构固定在电 池支架(206)的上表面。 2
CN104118549A 权利要求书 2/2页 8.根据权利要求6所述的单关节机器鱼,其特征在于:所述前壳体(501)、螺纹套 (503)和后壳体(502)的连接处分别设置有密封环(505):所述后壳体(502)上安装有充电 接头(506)和充气接口(507)。 9.根据权利要求6所述的单关节机器鱼,其特征在于:所述外壳体的横截面为中心对 称图形:圆形、椭圆形、正方形或正多边形。 10.一种水下推进平台,其特征在于:包括至少两个权利要求9所述的单关节机器鱼, 所述相邻的单关节机器鱼之间通过连接环(6)固定连接。 3
CN104118549A 说明书 1/4页 单关节机器鱼及水下推进平台 技术领域 [0001]本发明涉及一种直接作用在水中的推进器,特别是涉及一种仿生鱼类的水下机器 人。 背景技术 [0002] 伴随着人类文明的发展,可开采和利用的陆地资源正日益减少和枯竭。海洋面积 占地球面积的71%,海洋中蕴藏着丰富的生物资源和矿产资源。21世纪是海洋的世纪,人 类开发海洋和利用海洋的脚步,随着科技的发展逐渐加快。具有海洋勘测、海底探查、海洋 救捞、海底管道检测、以及水下侦查和跟踪功能的水下机器人,己成为探索海洋、开发海洋 和海洋防卫的重要工具。 [0003]仿生机器鱼可以进行长时间、大范围、工况较复杂的水下作业,可以用于机动性能 要求较高的场合,进行海洋生物考察、海底勘探和海洋救生等等许多场合。军事方面,由于 仿生机器鱼在声纳上的表现形式和生物鱼类几乎相同,具有噪声低,对环境扰动小,敌方不 容易发现等特点,这极有利于隐蔽鉴于仿生机器鱼的诸多优点,国内外学者越来越重视新 型仿生机器鱼的研究与开发,取得了很多阶段性的成果,设计了各种各样的机器鱼样机,机 器鱼的理论和实验研究已渐显规模。 [0004]目前,国内外仿生机器鱼的推进和转向主要是依靠两自由度胸鳍和尾鳍的配合来 实现相应的动作,上升下潜主要依靠胸鳍、改变重心或者储水仓方式实现,这些方式都需要 较复杂的机械结构和控制程序,即影响到机器鱼的机动性能,也不利于仿生机器鱼在爱好 者当中的普及和推广。 发明内容 [0005]本发明要解决的技术问题是提供一种结构简单、成本低、操作简便的单关节机器 鱼及水下推进平台。 [0006]本发明单关节机器鱼,包括外壳体、仿生推进机构、动力能源模块和控制通讯模 块,其中所述仿生推进机构包括尾鳍、C型骨架和上、下主轴,所述C型骨架的两端位于外壳 体后部的上、下两侧,所述尾鳍固定连接在C型骨架的后端,所述上、下主轴的外端分别与C 型骨架的两端固定连接,上、下主轴的内端穿过外壳体后部的轴孔进入外壳体内:所述动力 能源模块包括电池和推进驱动装置,所述电池和推进驱动装置固定安装在外壳体内,所述 推进驱动装置的输出端与上、下主轴的内端相连接,用于驱动上、下主轴往复旋转;所述控 制通讯模块包括集成主控板和天线,所述天线固定安装在外壳体上,所述集成主控板固定 在外壳体内: [0007]所述机器鱼还包括姿态调节机构,所述姿态调节机构包括设置在外壳体内的周向 旋转驱动装置和周向旋转配重,所述周向旋转驱动装置用于带动周向旋转配重绕外壳体的 前后方向的轴线转动。 [0008]本发明单关节机器鱼,其中所述周向旋转驱动装置包括前固定环、后固定环和旋 4

CN104118549A 说明 书 2/4页 转部件,所述前固定环和后固定环相对固定在外壳体的内壁上,前固定环和后固定环相对 的面上开设有环形滑槽,所述环形滑槽内分别设置有滚轮,两个所述滚轮之间通过连接杆 连接,所述周向旋转配重安装在连接杆上,所述旋转部件安装在前固定环或后固定环上,并 与连接杆相连接。 [0009]本发明单关节机器鱼,其中所述上、下主轴穿过外壳体的轴孔处固定安装有固定 圈,所述固定圈内侧的主轴上套装有弹性密封圈,所述弹性密封圈与固定圈之间安装有弹 性挡圈。 [0010]本发明单关节机器鱼,其中所述推进驱动装置为舵机,所述舵机通过舵机支架固 定安装在外壳体内,所述上主轴的内端固定连接有上卡盘,上卡盘的下表面上设置有若干 凸起,所述舵机的输出端上固定设置有下卡盘,所述下卡盘的边缘上设置有若干与凸起相 匹配的卡槽,所述上卡盘与下卡盘相贴合,所述若干凸起进入相对应的卡槽内。 [0011]本发明单关节机器鱼,其中所述电池通过电池支架固定安装在外壳体内,所述集 成主控板固定安装在电池支架上方。 [0012]本发明单关节机器鱼,其中所述外壳体包括前壳体、后壳体、螺纹套和后盖,所述 螺纹套的内表面的前后两端上分别设置有内螺纹,所述前壳体的后端和后壳体的前端分别 设置有外螺纹,前壳体和后壳体分别与螺纹套的前后两端螺纹连接,所述后盖螺纹连接在 后壳体的后端,所述前壳体的前端为半球体型。 [0013]本发明单关节机器鱼,其中所述前固定环和后固定环分别通过卡勾固定在前壳体 和后壳体的内壁上,所述舵机支架通过卡勾和插槽结构固定在后壳体的内壁上,所述电池 支架通过螺栓和插槽结构固定在后壳体的内壁上,所述集成主控板通过螺栓和卡勾结构固 定在电池支架的上表面。 [0014]本发明单关节机器鱼,其中所述前壳体、螺纹套和后壳体的连接处分别设置有密 封环:所述后壳体上安装有充电接头和充气接口。 [0015]本发明单关节机器鱼,其中所述外壳体的横截面为中心对称图形:圆形、椭圆形、 正方形或正多边形。 [0016]本发明水下推进平台,包括至少两个单关节机器鱼,所述相邻的单关节机器鱼之 间通过连接环固定连接。 [0017]本发明单关节机器鱼与现有技术不同之处在于本发明单关节机器鱼仅采用尾鳍 作为单一的推进机构,同时在外壳体内安装有姿态调节结构,姿态调节结构中的周向旋转 驱动装置可以带动周向旋转配重绕着外壳体的轴线转动,使机器鱼在水中绕着外壳体的轴 线翻滚一定角度达到调整水中姿态的目的,通过水中姿态的改变和尾鳍的配合,从而可以 实现机器鱼在水中进行前进、转弯、上浮和下潜等动作。由于本发明单关节机器鱼的推进机 构的结构简单,使得外壳体的密封性能好,成本低,易于控制。同时,还可以通过将多个单关 节机器鱼进行并排连接组成水下推进平台,用于搭载其他水下设备。 [0018] 下面结合附图对本发明的单关节机器鱼及水下推进平台作进一步说明。 附图说明 [0019] 图1为本发明单关节机器鱼的主视图; [0020] 图2为本发明单关节机器鱼的俯视图; 5