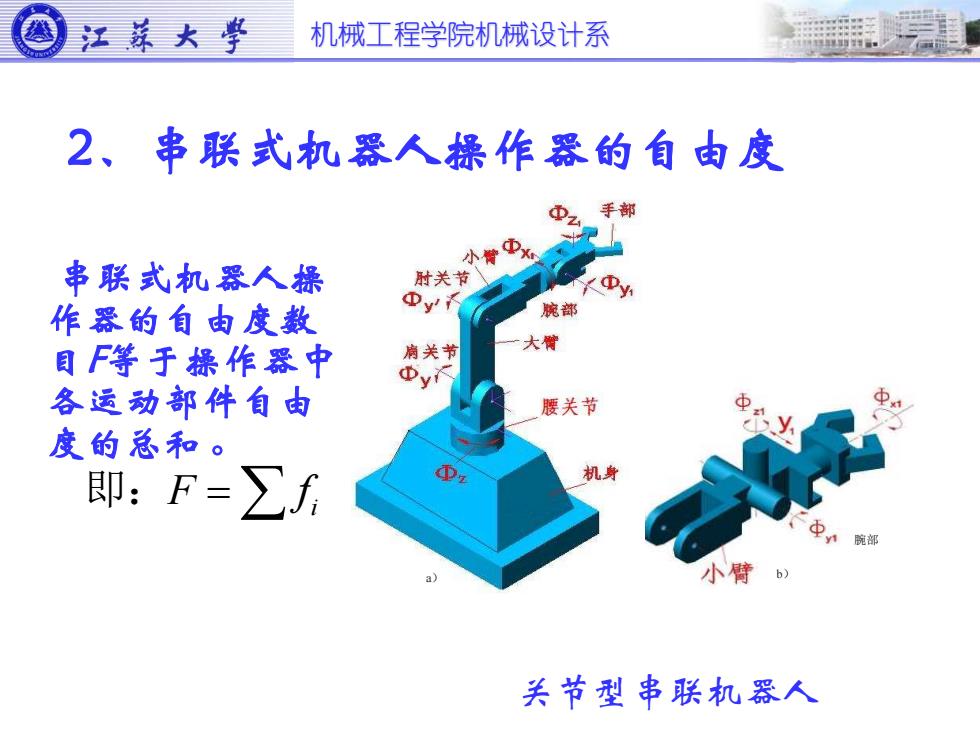
机械工程学院机械设计系 2、串联式机器人操作器的自由度 串联式机器人操 作器的自由度数 目F等于操作器中 各运动部件自由 度的总和 。 即:F f = i b) 腕部 a) 关节型串联机器人
机械工程学院机械设计系 2、串联式机器人操作器的自由度 串联式机器人操 作器的自由度数 目F等于操作器中 各运动部件自由 度的总和 。 即:F f = i b) 腕部 a) 关节型串联机器人

机械工程学院机械设计系 3、串联式机器人操作器的结构分类 直角坐标型机器人 (1)直角坐标型
机械工程学院机械设计系 3、串联式机器人操作器的结构分类 直角坐标型机器人 (1)直角坐标型
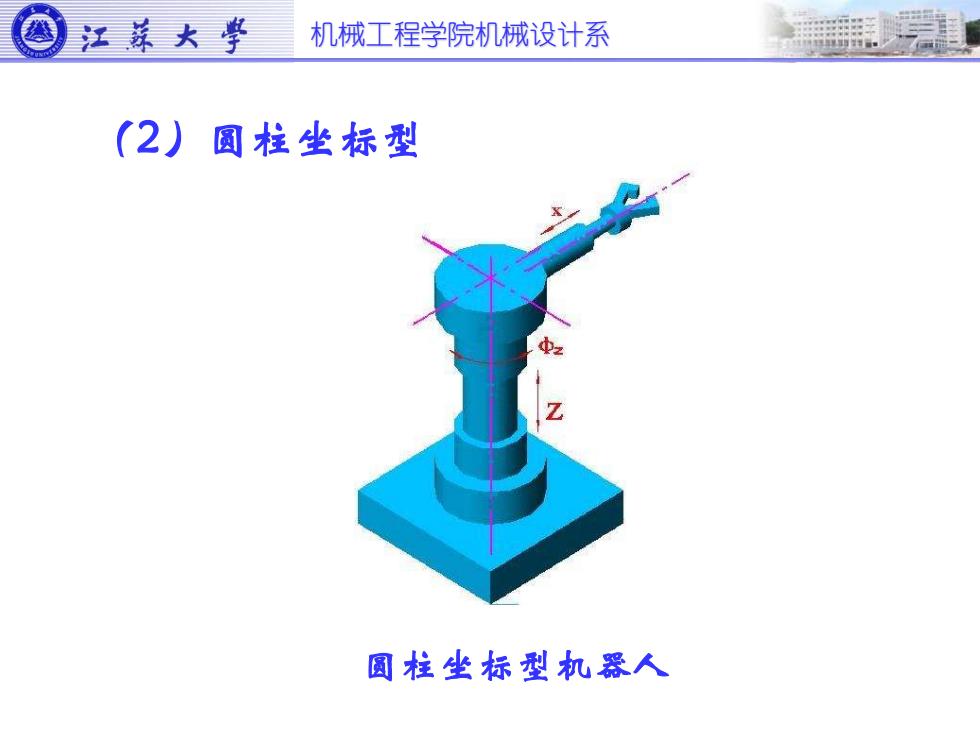
机械工程学院机械设计系 (2)圆柱坐标型 圆柱坐标型机器人
机械工程学院机械设计系 (2)圆柱坐标型 圆柱坐标型机器人