机械工程学院机械设计系 第二章 平面机构的运动分析 2024年11月1日
机械工程学院机械设计系 第二章 平面机构的运动分析 2024年11月1日
机械工程学院机械设计系 第一节 机构运动分析的目的和方法 第二节 速度瞬心法及其应用 第三节 用矢量方程解析法作平面机构的 运动分析 第四节 复杂平面机构的运动分析* 第二章 平面机构的运动分析
机械工程学院机械设计系 第一节 机构运动分析的目的和方法 第二节 速度瞬心法及其应用 第三节 用矢量方程解析法作平面机构的 运动分析 第四节 复杂平面机构的运动分析* 第二章 平面机构的运动分析
机械工程学院机械设计系 方法: 图解法: 解析法: 形象直观,但作图比较繁琐。 包括速度瞬心法和矢量方程图解法。 计算精度高,但建立数学模型较复杂。 机构的运动分析是在机构初步综合完成以后,为 考察机构运动性能或优化机构参数而进行的,也为研 究机构的动力性能提供必要的依据。 第一节 机构运动分析的目的和方法
机械工程学院机械设计系 方法: 图解法: 解析法: 形象直观,但作图比较繁琐。 包括速度瞬心法和矢量方程图解法。 计算精度高,但建立数学模型较复杂。 机构的运动分析是在机构初步综合完成以后,为 考察机构运动性能或优化机构参数而进行的,也为研 究机构的动力性能提供必要的依据。 第一节 机构运动分析的目的和方法
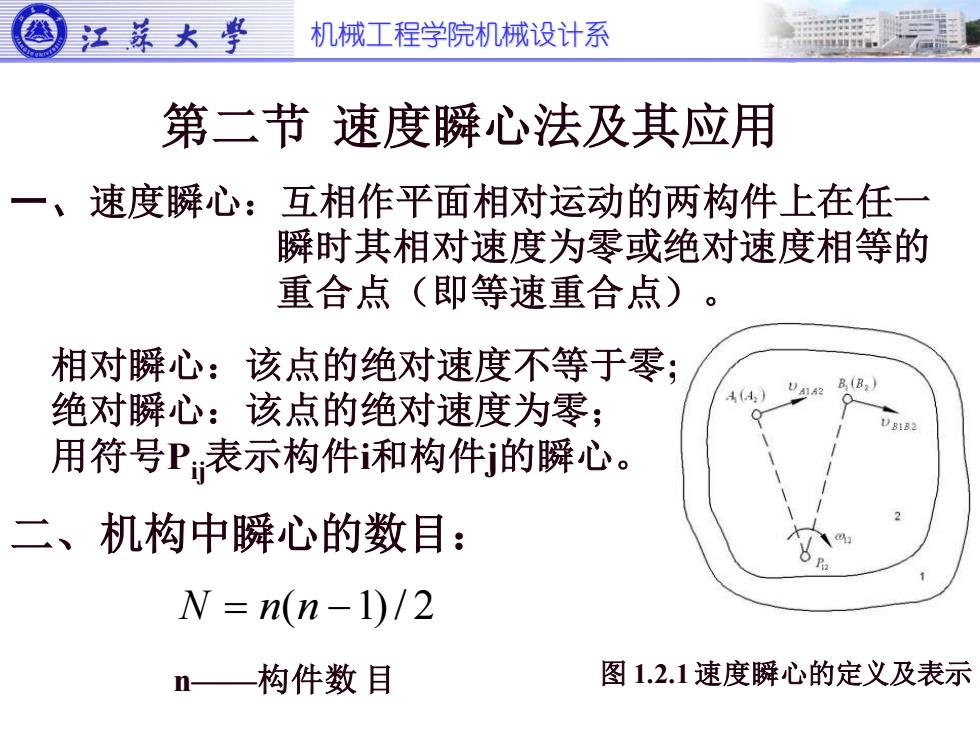
机械工程学院机械设计系 二、机构中瞬心的数目: n——构件数 目 一、速度瞬心:互相作平面相对运动的两构件上在任一 瞬时其相对速度为零或绝对速度相等的 重合点(即等速重合点)。 相对瞬心:该点的绝对速度不等于零; 绝对瞬心:该点的绝对速度为零; 用符号Pij表示构件i和构件j的瞬心。 第二节 速度瞬心法及其应用 图 1.2.1 速度瞬心的定义及表示 N = n(n −1)/ 2
机械工程学院机械设计系 二、机构中瞬心的数目: n——构件数 目 一、速度瞬心:互相作平面相对运动的两构件上在任一 瞬时其相对速度为零或绝对速度相等的 重合点(即等速重合点)。 相对瞬心:该点的绝对速度不等于零; 绝对瞬心:该点的绝对速度为零; 用符号Pij表示构件i和构件j的瞬心。 第二节 速度瞬心法及其应用 图 1.2.1 速度瞬心的定义及表示 N = n(n −1)/ 2
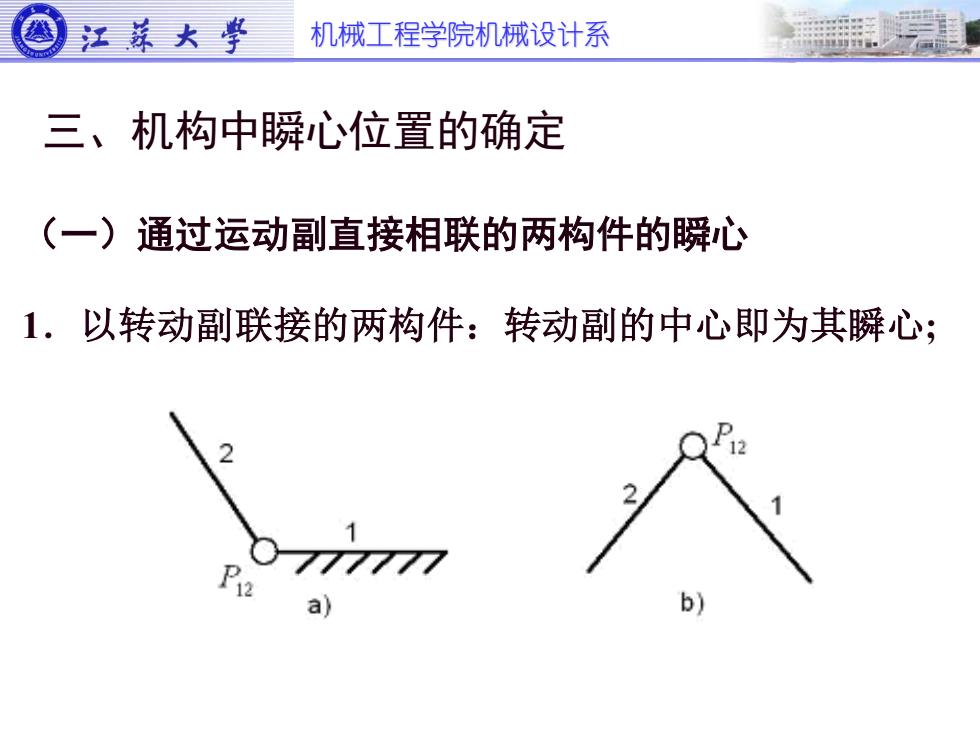
机械工程学院机械设计系 三、机构中瞬心位置的确定 (一)通过运动副直接相联的两构件的瞬心 1.以转动副联接的两构件:转动副的中心即为其瞬心;
机械工程学院机械设计系 三、机构中瞬心位置的确定 (一)通过运动副直接相联的两构件的瞬心 1.以转动副联接的两构件:转动副的中心即为其瞬心;