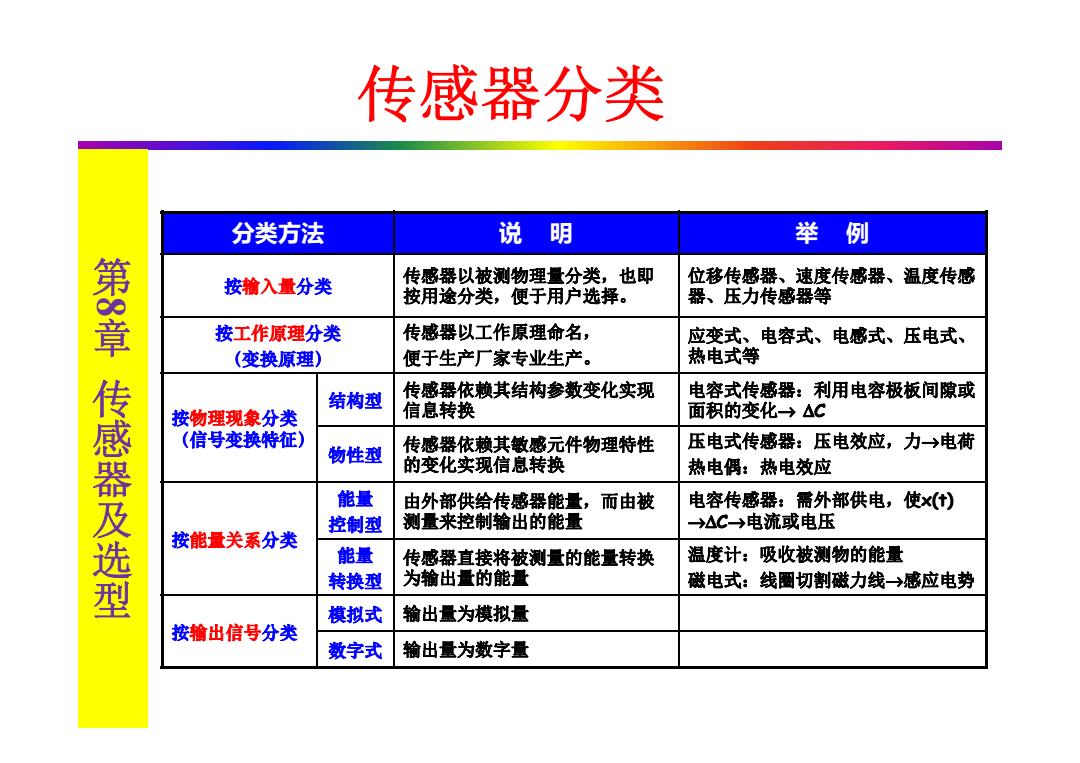
传感器分类 分类方法 说明 举例 按输入量分类 传感器以被测物理量分类,也即 位移传感器、速度传感器、温度传感 按用途分类,便于用户选择。 器、压力传感器等 第章传感器及选型 按工作原理分类 传感器以工作原理命名, 应变式、电容式、电感式、压电式、 (变换原理) 便于生产厂家专业生产。 热电式等 结构型 传感器依赖其结构参数变化实现 电容式传感器:利用电容极板间隙或 按物理现象分类 信息转换 面积的变化→△C (信号变换特征) 压电式传感器:压电效应,力→电荷 物性型 传感器依赖其敏感元件物理特性 的变化实现信息转换 热电偶:热电效应 能量 由外部供给传感器能量,而由被 电容传感器:需外部供电,使x(t) 控制型 测量来控制输出的能量 →C→电流或电压 按能量关系分类 能量 传感器直接将被测量的能量转换 温度计:吸收被测物的能量 转换型 为输出量的能量 磁电式:线圈切割磁力线→感应电势 模拟式 输出量为模拟量 按输出信号分类 数字式 输出量为数字量
传感器分类 第 分类方法 说 明 举 例 按输入量分类 传感器以被测物理量分类,也即 按用途分类 便于用户选择 位移传感器、速度传感器、温度传感 器 压力传感器等 第8 章 传 按用途分类,便于用户选择。 器、压力传感器等 按工作原理分类 (变换原理) 传感器以工作原理命名 传感器以工作原理命名, 便于生产厂家专业生产。 应变式、电容式、电感式、压电式、 传 热电式等 感 器 按物理现象分类 (信号变换特征) 结构型 传感器依赖其结构参数变化实现 信息转换 电容式传感器:利用电容极板间隙或 面积的变化→ ΔC 物性型 传感器依赖其敏感元件物理特性 的变化实现信息转换 压电式传感器:压电效应 压电式传感器:压电效应,力→电荷 器 热电偶:热电效应 及 选 的变化实现信息转换 热电偶:热电效应 按能量关系分类 能量 控制型 由外部供给传感器能量,而由被 测量来控制输出的能量 电容传感器:需外部供电,使x(t) →ΔC→电流或电压 能量 传感器直接将被测量的能量转换 温度计:吸收被测物的能量 选 型 能量 转换型 传感器直接将被测量的能量转换 为输出量的能量 温度计:吸收被测物的能量 磁电式:线圈切割磁力线→感应电势 按输出信号分类 模拟式 输出量为模拟量 输 信 分 数字式 输出量为数字量
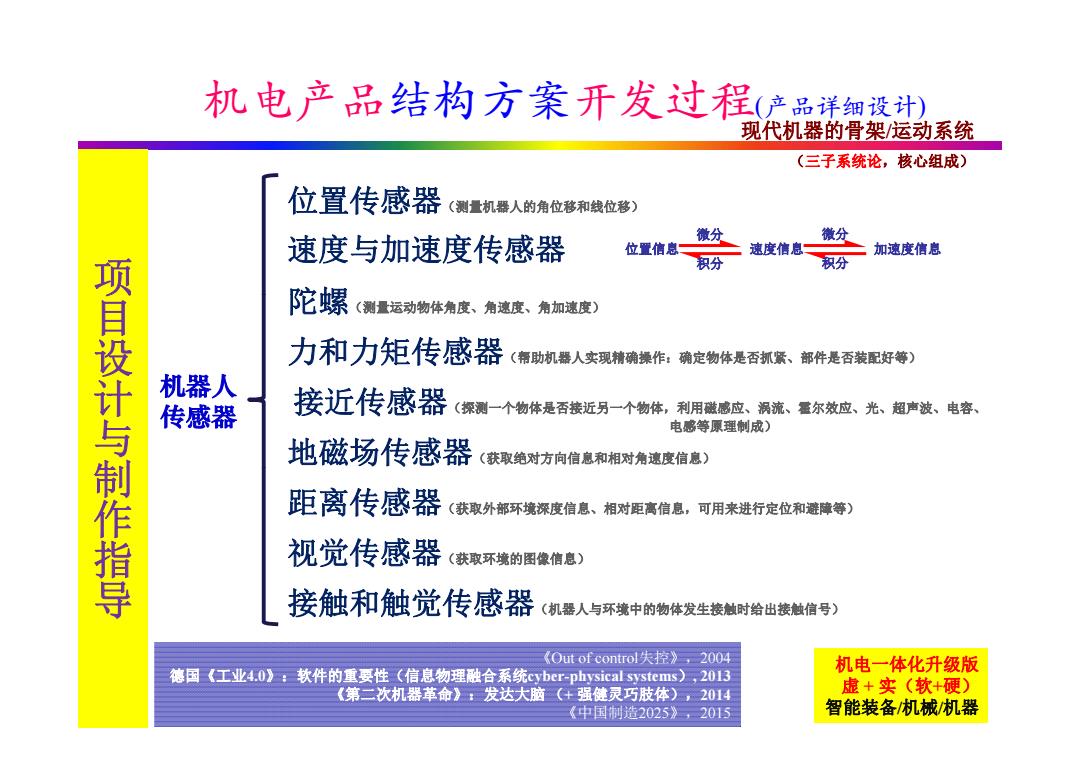
机电产品结构方案开发过程(产品详细设计) 现代机器的骨架/运动系统 (三子系统论,核心组成) 位置传感器 (测量机器人的角位移和线位移) 速度与加速度传感器 徽分 的 位置信息 速度信息 加速度信息 积分 积分 陀螺(测运动物体角度、角速度、角加速度) 项目设计与制作指导 力和力矩传感器 (帮助机器人实现精确操作:确定物体是否抓紧、部件是否装配好等) 机器人 传感器 接近传感器 (探测一个物体是否接近另一个物体,利用磁感应、涡流、墨尔效应、光、超声波、电容、 电感等原理制成) 地磁场传感器 (获取绝对方向信息和相对角速度信息) 距离传感器 (获取外部环境深度信息、相对距高信息,可用来进行定位和避障等) 视觉传感器 (获取环境的图像信息) 接触和触觉传感器 (机器人与环境中的物体发生接触时给出接触信号) 《0 ut of control失控》,2004 德国《工业4.0》:软件的重要性(信息物理融合系统cyber-.physical systems),2013 机电一体化升级版 《第二次机器革命》:发达大脑(+强健灵巧肢体),2014 虚+实(软+硬) 《中国制造2025》,2015 智能装备/机械/机器
现代机器的骨架 运动系统 机电产品结构方案开发过程 (产品详细设计 ) 现代机器的骨架/运动系统 (三子系统论,核心组成) 位置传感器(测量机器人的角位移和线位移) 项 陀螺速度与加速度传感器 位置信息 速度信息 加速度信息 微分积分 微分 项 积分 目设 计 机器人 陀螺(测量运动物体角度、角速度、角加速度) 计 力和力矩传感器(帮助机器人实现精确操作:确定物体是否抓紧、部件是否装配好等) 与 制 机器人 传感器 接近传感器(探测一个物体是否接近另一个物体,利用磁感应、涡流、霍尔效应、光、超声波、电容、 电感等原理制成) 制 地磁场传感器(获取绝对方向信息和相对角速度信息) 作 指 距离传感器(获取外部环境深度信息、相对距离信息,可用来进行定位和避障等) 导 视觉传感器(获取环境的图像信息) 接触和触觉传感器(机器人与环境中的物体发生接触时给出接触信号) 机电一体化升级版 虚 + 实(软 +硬) 智能装备/机械/机器 《Out of control失控》,2004 德国《工业4.0》:软件的重要性(信息物理融合系统cyber-physical systems), 2013 《第二次机器革命》:发达大脑 (+ 强健灵巧肢体),2014 《中国制造2025》,2015
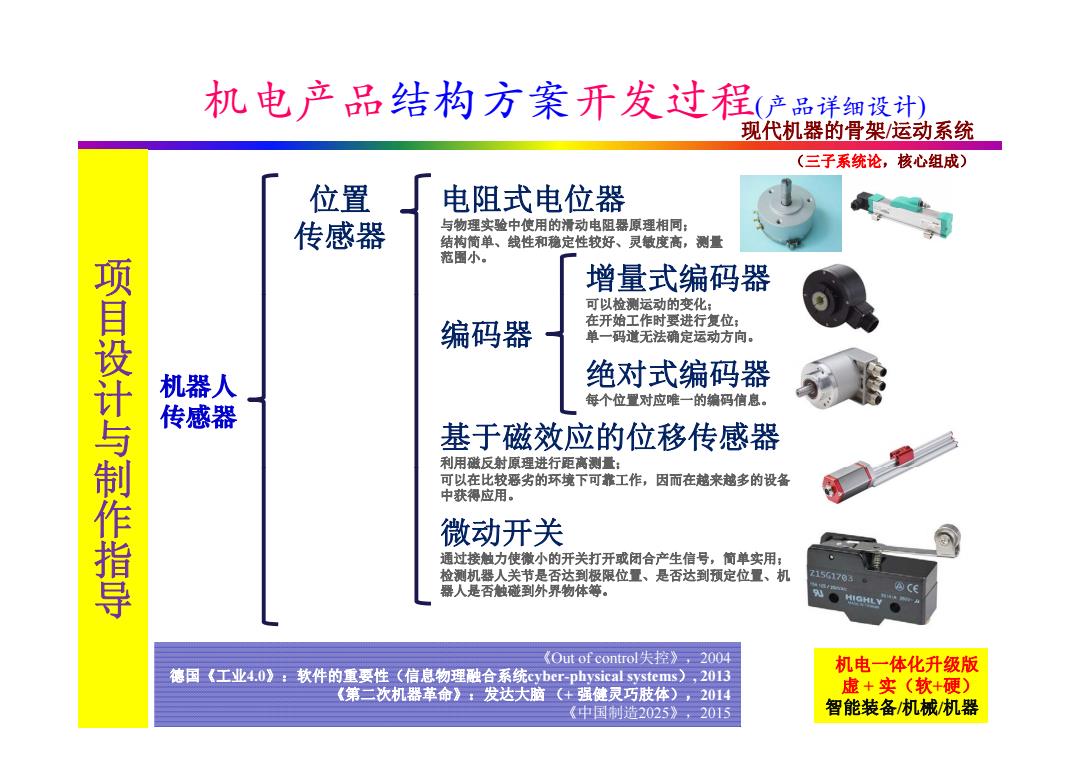
机电产品结构方案开发过程(产品详细设计) 现代机器的骨架/运动系统 (三子系统论,核心组成) 位置 电阻式电位器 传感器 与物理实验中使用的滑动电阻器原理相同: 结构简单、线性和稳定性好、灵敏度高,测量 范图小。 增量式编码器 可以检测运动的变化: 在开始工作时要进行复位: 项目设计与制作指导 编码器 单一码道无法确定运动方向。 机器人 绝对式编码器 每个位置对应唯一的编码信息。 传感器 基于磁效应的位移传感器 利用磁反射原理进行距离测量: 可以在比较恶劣的环境下可靠工作,因而在越来越多的设备 中获得应用。 微动开关 通过接触力使微小的开关打开或闭合产生信号,简单实用: 检测机器人关节是否达到极限位置、是否达到预定位置、机 2151705 器人是否触碰到外界物体等。 《0 it of control失控》,2004 德国《工业4.0》:软件的重要性(信息物理融合系统cyber-.physical systems),2013 机电一体化升级版 《第二次机器革命》:发达大脑(+强健灵巧肢体),2014 虚+实(软+硬) 《中国制造2025》,2015 智能装备/机械/机器
现代机器的骨架 运动系统 机电产品结构方案开发过程 (产品详细设计 ) 现代机器的骨架/运动系统 (三子系统论,核心组成) 位置 电阻式电位器 项 传感器 与物理实验中使用的滑动电阻器原理相同; 结构简单、线性和稳定性较好、灵敏度高,测量 范围小。 增量式编码器 项 目设 计 机器人 编码器 可以检测运动的变化; 在开始工作时要进行复位; 单一码道无法确定运动方向。 计 绝对式编码器 与 制 机器人 传感器 基于磁效应的位移传感器 利用磁反射原理进行距离测量; 绝对式编码器 每个位置对应唯一的编码信息。 制 作 指 利用磁反射原理进行距离测量; 可以在比较恶劣的环境下可靠工作,因而在越来越多的设备 中获得应用。 微动开关 通过接触力使微小的开关打开或闭合产生信号 简单实用 指 导 通过接触力使微小的开关打开或闭合产生信号,简单实用; 检测机器人关节是否达到极限位置、是否达到预定位置、机 器人是否触碰到外界物体等。 机电一体化升级版 虚 + 实(软 +硬) 智能装备/机械/机器 《Out of control失控》,2004 德国《工业4.0》:软件的重要性(信息物理融合系统cyber-physical systems), 2013 《第二次机器革命》:发达大脑 (+ 强健灵巧肢体),2014 《中国制造2025》,2015

机电产品结构方案开发过程(产品详细设计) 现代机器的骨架/运动系统 (三子系统论,核心组成) 测速发电机 输出与角速度成正比的模拟电压信号。 速度与 加速度 基于编码器的速度测量 利用单位时间的位移变化信息计算速度信息; 项目设计与制作指导 传感器 如果编码器转速很缨慢,速度测量将变得不准确。 机器人 多普勒效应测速系统 传感器 利用多普勒频移原理测速: 对于移动机器人,可以消除或减少车轮打滑、轮胎磨损或轮 胎内压力等因素导致的测量误差。 加速度传感器 散 由力或力矩的测量值计算得到加速度,常见的有电阻应变式、 压阻式、压电式等加速度传感器。 《0 ut of control失控》,2004 德国《工业4.0》:软件的重要性(信息物理融合系统cyber-.physical systems),2013 机电一体化升级版 《第二次机器革命》:发达大脑(+强健灵巧肢体),2014 虚+实(软+硬) 《中国制造2025》,2015 智能装备/机械/机器
现代机器的骨架 运动系统 机电产品结构方案开发过程 (产品详细设计 ) 现代机器的骨架/运动系统 (三子系统论,核心组成) 测速发电机 项 速度与 加速度 输出与角速度成正比的模拟电压信号。 基于编码器的速度测量 项 目设 计 机器人 加速度 传感器 基于编码器的速度测量 利用单位时间的位移变化信息计算速度信息; 如果编码器转速很缓慢,速度测量将变得不准确。 多普勒效应测速系统 计 与 制 机器人 传感器 多普勒效应测速系统 利用多普勒频移原理测速; 对于移动机器人,可以消除或减少车轮打滑、轮胎磨损或轮 制 胎内压力等因素导致的测量误差。 作 指 加速度传感器 由力或力矩的测量值计算得到加速度,常见的有电阻应变式、 导 压阻式 压电式等加速度传感器 压阻式、压电式等加速度传感器。 机电一体化升级版 虚 + 实(软 +硬) 智能装备/机械/机器 《Out of control失控》,2004 德国《工业4.0》:软件的重要性(信息物理融合系统cyber-physical systems), 2013 《第二次机器革命》:发达大脑 (+ 强健灵巧肢体),2014 《中国制造2025》,2015