优点,如制造简单、精度高、摩擦力极小、工作平稳等, 图9-4给出的是一移动桥式结构CW气浮导轨的结构示意图,其结构中有六个气垫2(水 平面四个,侧面两个),使得整个桥架浮起。滚轮3受压缩弹簧4的压力作用而与导向块5 紧贴,由弹簧力保证气垫在工作状态下与导轨导向面之间的间隙。当桥架6移动时,若产生 扭动,则使气垫与导轨面之间的间隙量发生变化,其压力也随之变化,从而造成瞬时的不平 衡状态,但在弹簧力的作用下会重新达到平衡,使之稳定地保持10μm的间隙量,以保证桥 架的运动精度。气浮导轨的进气压力一般为3一6个大气压,要求有稳压装置。 A-A 图94三坐标测量机气浮导轨的结构 1一工作台2一气垫3一滚轮4一压缩弹黄5一导向块6一桥架 气浮技术的发展使三坐标测量机在加工周期和精度方面均有很大的突破。目前不少生产 厂在寻找高强度轻型材料作为导轨材料,有些生产厂已选用陶瓷或高膜量型的碳素纤维作为 移动桥架和横梁上运动部件的材料。另外,为了加速热传导,减少热变形,ZEISS公司采用 带涂层的抗时效合金来制造导轨,使其时效变形极小且使其各部分的温度更加趋于均匀 致,从而使整机的测量精度得到了提高,而对环境温度的要求却又可以放宽些。 第三节三坐标测量机的测量系统 三坐标测量机的测量系统由标尺系统和测头系统构成,它们是三坐标测量机的关键组成 部分,决定者CM测量精度的高低。 一、标尺系统 标尺系统是用来度量各轴的坐标数值的,目前三坐标测量机上使用的标尺系统种类很 多,它们与在各种机床和仪器上使用的标尺系统大致相同,按其性质可以分为机械式标尺系 统(如精密丝杠加微分鼓轮,精密齿条及齿轮,滚动直尺)入、光学式标尺系统(如光学读数 刻线尺,光学编码器,光栅,激光干涉仪)和电气式标尺系统(如感应同步器,磁栅)。根 9.6
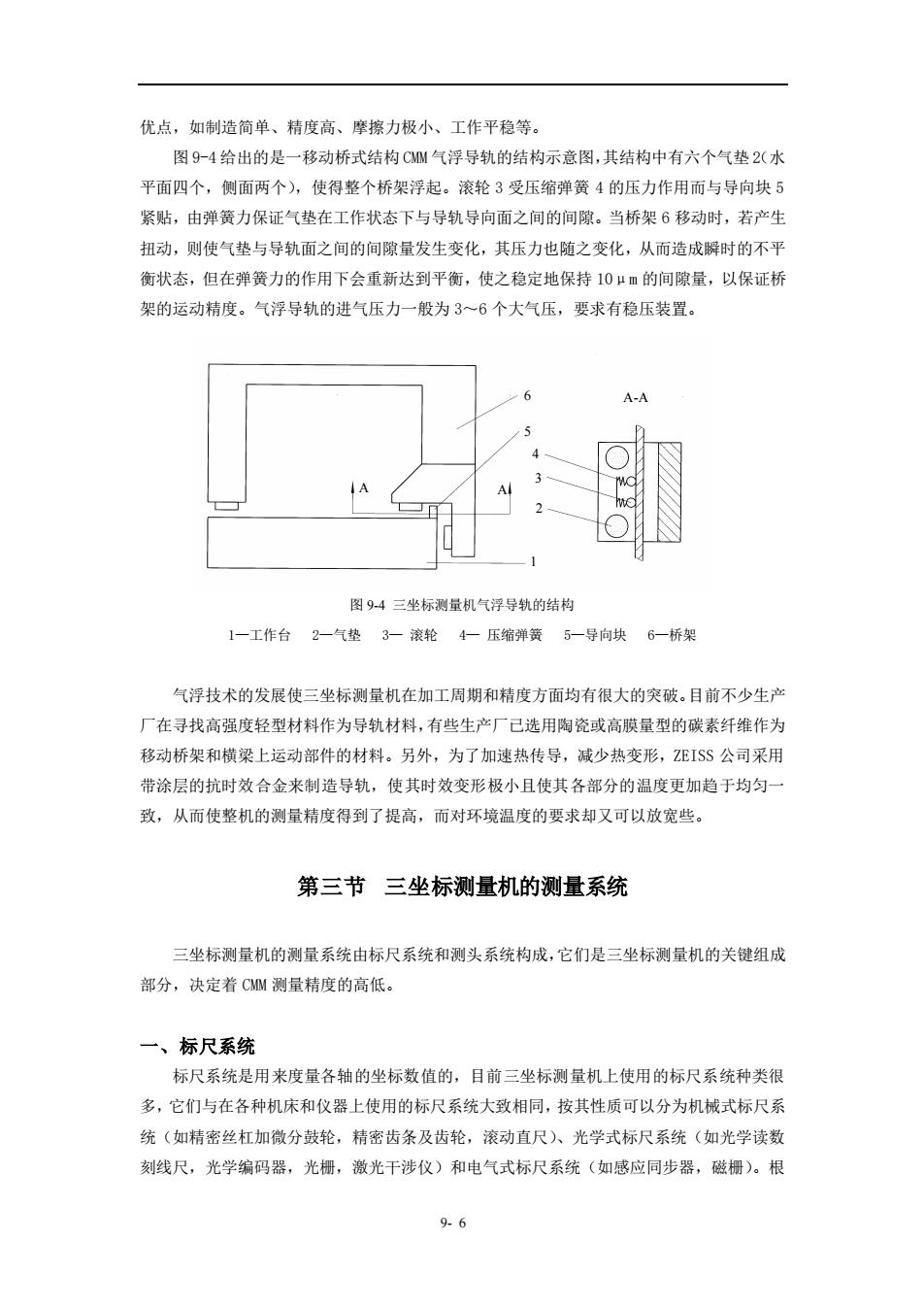
9- 6 优点,如制造简单、精度高、摩擦力极小、工作平稳等。 图 9-4 给出的是一移动桥式结构 CMM 气浮导轨的结构示意图,其结构中有六个气垫 2(水 平面四个,侧面两个),使得整个桥架浮起。滚轮 3 受压缩弹簧 4 的压力作用而与导向块 5 紧贴,由弹簧力保证气垫在工作状态下与导轨导向面之间的间隙。当桥架 6 移动时,若产生 扭动,则使气垫与导轨面之间的间隙量发生变化,其压力也随之变化,从而造成瞬时的不平 衡状态,但在弹簧力的作用下会重新达到平衡,使之稳定地保持 10μm 的间隙量,以保证桥 架的运动精度。气浮导轨的进气压力一般为 3~6 个大气压,要求有稳压装置。 图 9-4 三坐标测量机气浮导轨的结构 1—工作台 2—气垫 3— 滚轮 4— 压缩弹簧 5—导向块 6—桥架 气浮技术的发展使三坐标测量机在加工周期和精度方面均有很大的突破。目前不少生产 厂在寻找高强度轻型材料作为导轨材料,有些生产厂已选用陶瓷或高膜量型的碳素纤维作为 移动桥架和横梁上运动部件的材料。另外,为了加速热传导,减少热变形,ZEISS 公司采用 带涂层的抗时效合金来制造导轨,使其时效变形极小且使其各部分的温度更加趋于均匀一 致,从而使整机的测量精度得到了提高,而对环境温度的要求却又可以放宽些。 第三节 三坐标测量机的测量系统 三坐标测量机的测量系统由标尺系统和测头系统构成,它们是三坐标测量机的关键组成 部分,决定着 CMM 测量精度的高低。 一、标尺系统 标尺系统是用来度量各轴的坐标数值的,目前三坐标测量机上使用的标尺系统种类很 多,它们与在各种机床和仪器上使用的标尺系统大致相同,按其性质可以分为机械式标尺系 统(如精密丝杠加微分鼓轮,精密齿条及齿轮,滚动直尺)、光学式标尺系统(如光学读数 刻线尺,光学编码器,光栅,激光干涉仪)和电气式标尺系统(如感应同步器,磁栅)。根 1 2 3 4 5 6 A-A A A
据对国内外生产CW所使用的标尺系统的统计分析可知,使用最多的是光栅,其次是感应同 步器和光学编码器。有些高精度CW的标尺系统采用了激光干涉仪。 二、测头系统 (一)测头 三坐标测量机是用测头来拾取信号的,因而测头的性能直接影响测量精度和测量效率, 没有先进的测头就无法充分发挥测量机的功能。在三坐标测量机上使用的测头,按结构原理 可分为机械式、光学式和电气式等:而按测量方法又可分为接触式和非接触式两类。 1.机械接触式测头 机械接触式测头为刚性测头,根据其触测部位的形状,可以分为圆雏形测头、圆柱形测 头、球形测头、半圆形测头、点测头、V型块测头等(如图9-5所示)。这类测头的形状简 单,制造容易,但是测量力的大小取决于操作者的经验和技能,因此测量精度差、效率低。 目前除少数手动测量机还采用此种测头外,绝大多数测量机己不再使用这类测头。 图95机械接触式测头 (a)圆锥形测头)圆柱形测头(@)球形测头(@①半圆形测头(@)点测头(0v型块测头 2.电气接触式测头 电气接触式测头目前已为绝大部分坐标测量机所采用,按其工作原理可分为动态测头和 静态测头。 (1)动态测头 常用动态测头的结构如图9-6所示。测杆安装在芯体上,而芯体则通过三个沿圆周120 分布的钢球安放在三对触点上,当测杆没有受到测量力时,芯体上的钢球与三对触点均保持 接触,当测杆的球状端部与工件接触时,不论受到X、Y、Z哪个方向的接触力,至少会引起 一个钢球与触点脱离接触,从而引起电路的断开,产生阶跃信号,直接或通过计算机控制采 样电路,将沿三个轴方向的坐标数据送至存储器,供数据处理用。 可见,测头是在触测工件表面的运动过程中,瞬间进行测量采样的,故称为动态测头。 也称为触发式测头。动态测头结构简单、成本低,可用于高速测量,但精度稍低,而且动态 9.7
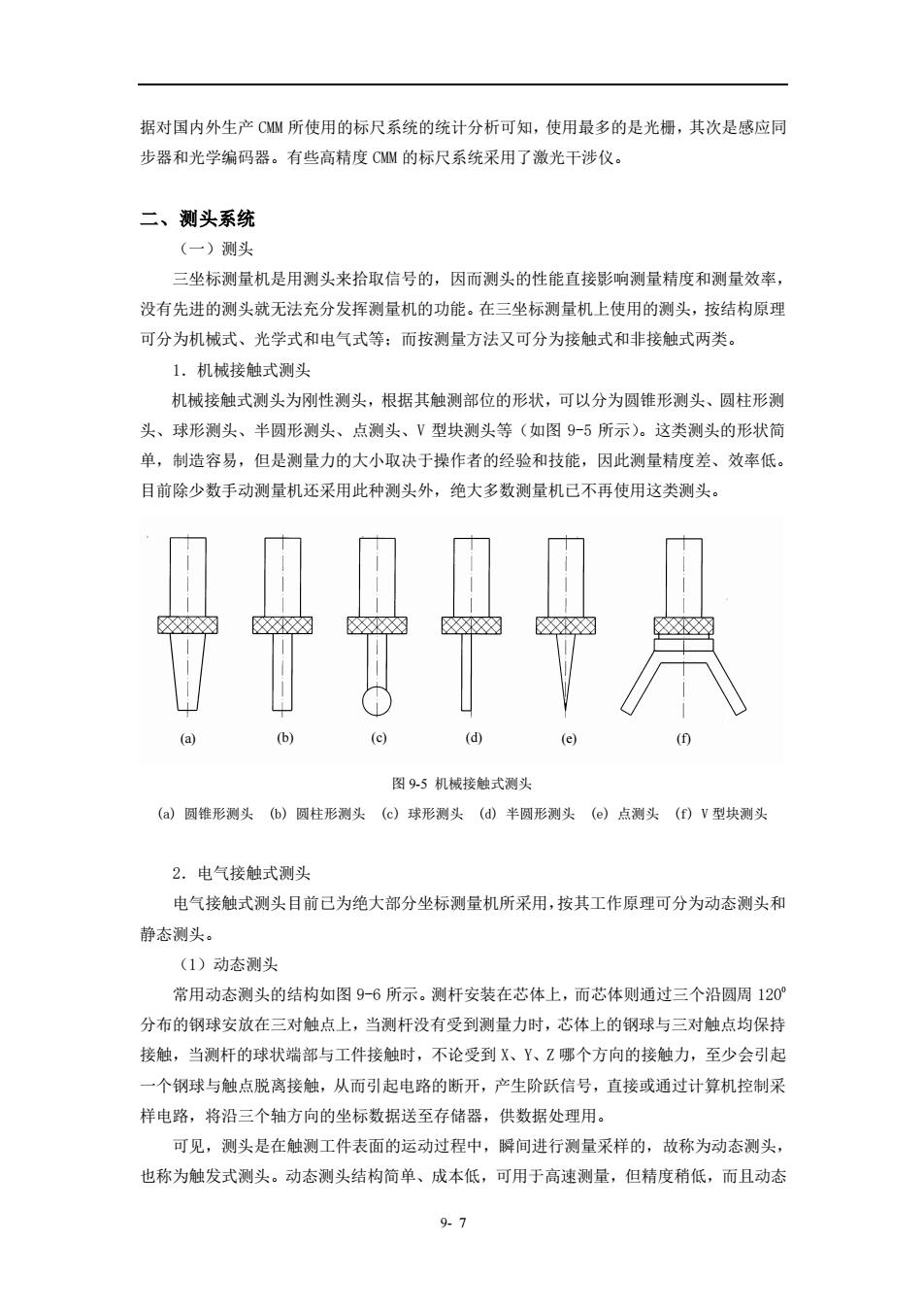
9- 7 据对国内外生产 CMM 所使用的标尺系统的统计分析可知,使用最多的是光栅,其次是感应同 步器和光学编码器。有些高精度 CMM 的标尺系统采用了激光干涉仪。 二、测头系统 (一)测头 三坐标测量机是用测头来拾取信号的,因而测头的性能直接影响测量精度和测量效率, 没有先进的测头就无法充分发挥测量机的功能。在三坐标测量机上使用的测头,按结构原理 可分为机械式、光学式和电气式等;而按测量方法又可分为接触式和非接触式两类。 1.机械接触式测头 机械接触式测头为刚性测头,根据其触测部位的形状,可以分为圆锥形测头、圆柱形测 头、球形测头、半圆形测头、点测头、V 型块测头等(如图 9-5 所示)。这类测头的形状简 单,制造容易,但是测量力的大小取决于操作者的经验和技能,因此测量精度差、效率低。 目前除少数手动测量机还采用此种测头外,绝大多数测量机已不再使用这类测头。 图 9-5 机械接触式测头 (a) 圆锥形测头 (b) 圆柱形测头 (c) 球形测头 (d) 半圆形测头 (e) 点测头 (f) V 型块测头 2.电气接触式测头 电气接触式测头目前已为绝大部分坐标测量机所采用,按其工作原理可分为动态测头和 静态测头。 (1)动态测头 常用动态测头的结构如图 9-6 所示。测杆安装在芯体上,而芯体则通过三个沿圆周 1200 分布的钢球安放在三对触点上,当测杆没有受到测量力时,芯体上的钢球与三对触点均保持 接触,当测杆的球状端部与工件接触时,不论受到 X、Y、Z 哪个方向的接触力,至少会引起 一个钢球与触点脱离接触,从而引起电路的断开,产生阶跃信号,直接或通过计算机控制采 样电路,将沿三个轴方向的坐标数据送至存储器,供数据处理用。 可见,测头是在触测工件表面的运动过程中,瞬间进行测量采样的,故称为动态测头, 也称为触发式测头。动态测头结构简单、成本低,可用于高速测量,但精度稍低,而且动态 (a) (b) (c) (d) (e) (f)