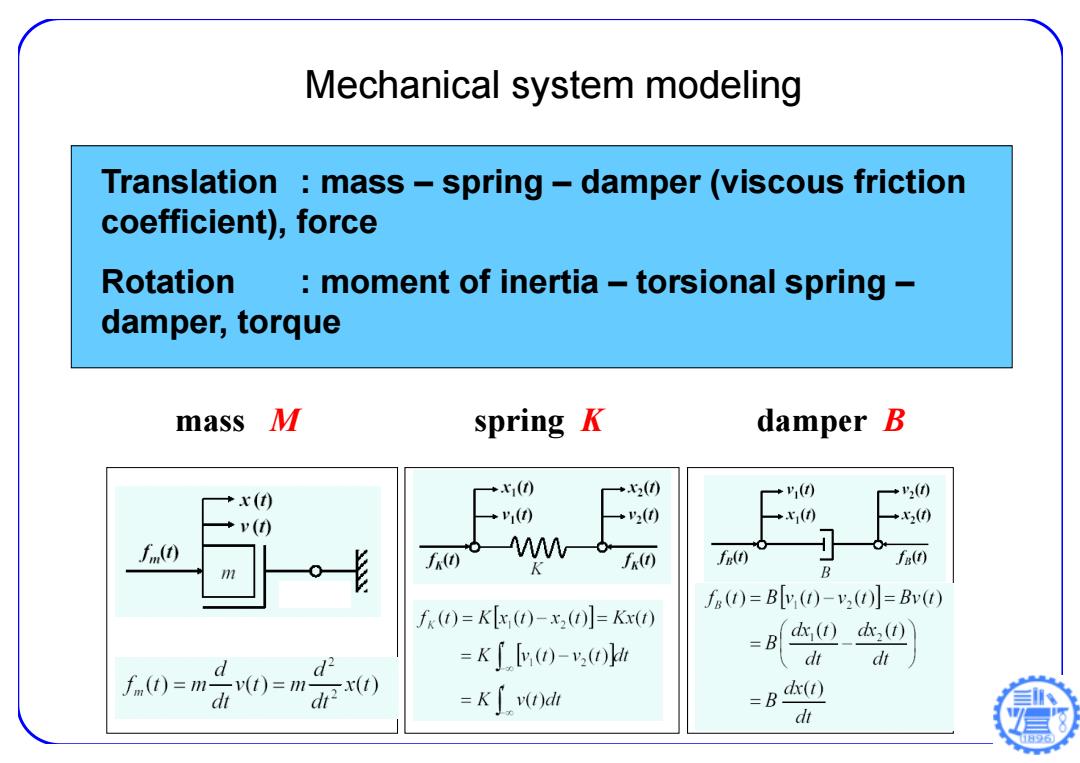
Mechanical system modeling Translation mass-spring -damper(viscous friction coefficient),force Rotation moment of inertia-torsional spring damper,torque mass M spring K damper B +x(0 →xz(0 →x(t) →(0 →2(0 一→10 →(0 +x1() +v(0 →(0 f.(() f() 8M 6- f() fe(t) fa(t) 71 K B fo(1)=Blv (1)-v2(1)=Bv(t) f()=K()-x2()]=Kx() =K(-v.( =B () (t) d d2 dt dt .0=m市0=m =KJv(dr =B( dt
Mechanical system modeling Translation : mass – spring – damper (viscous friction coefficient), force Rotation : moment of inertia – torsional spring – damper, torque mass M spring K damper B
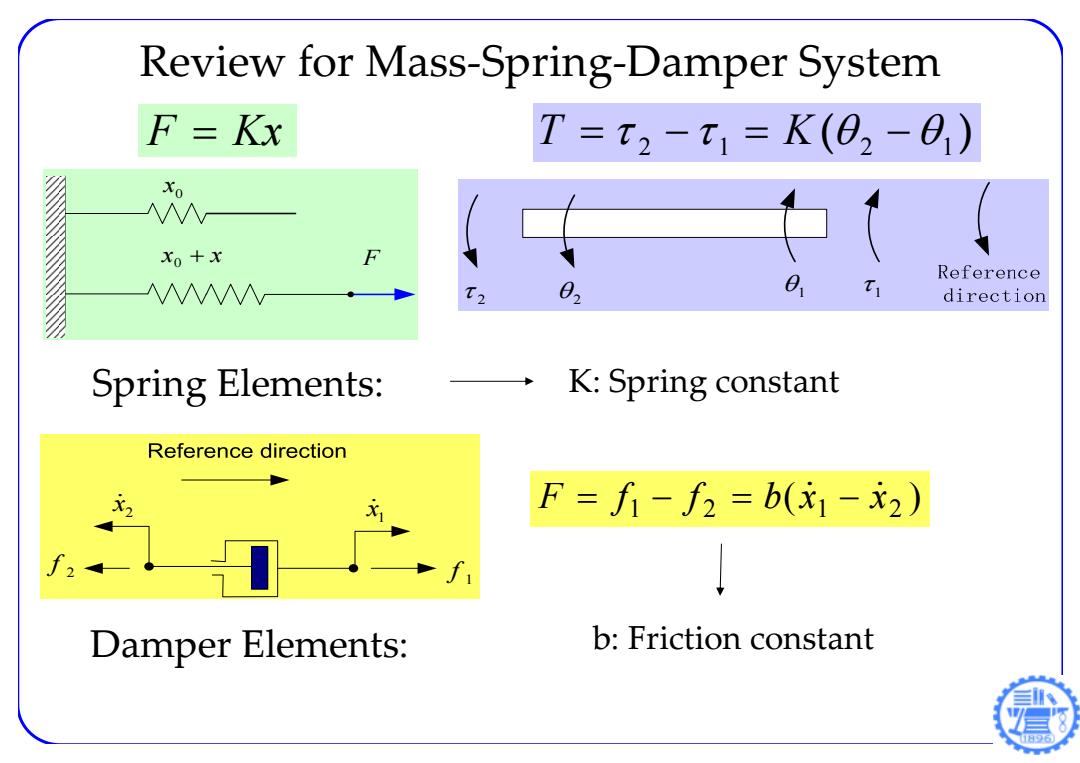
Review for Mass-Spring-Damper System F=Kx T=t2-t1=K(02-0) Xo Xo+x F 02 0、 Reference direction Spring Elements: K:Spring constant Reference direction F=f-f2=b(x1-x2) f Damper Elements: b:Friction constant
Review for Mass‐Spring‐Damper System 0 x x x 0 F Spring Elements: K: Spring constant ( ) 2 1 2 1 F Kx T K 2 1 2 1 1 x2 x 1 2 f f ( ) 1 2 1 2 F f f b x x Damper Elements: b: Friction constant
Review for Mass-Spring-Damper System Newton's second law ma=∑F Ja=∑T F=the vector sum of all forces applied to each body in a system,newtons (N)or pounds (lb) a the vector acceleration of each body with respect to an inertial reference frame.m/sec2 or ft/sec2 m=mass of the body.Kg or slug
Newton’s second law ma F J T F = the vector sum of all forces applied to each body in a system, newtons (N) or pounds (lb) a = the vector acceleration of each body with respect to an inertial reference frame. m/sec2 or ft/sec2 m = mass of the body. Kg or slug Review for Mass-Spring-Damper System