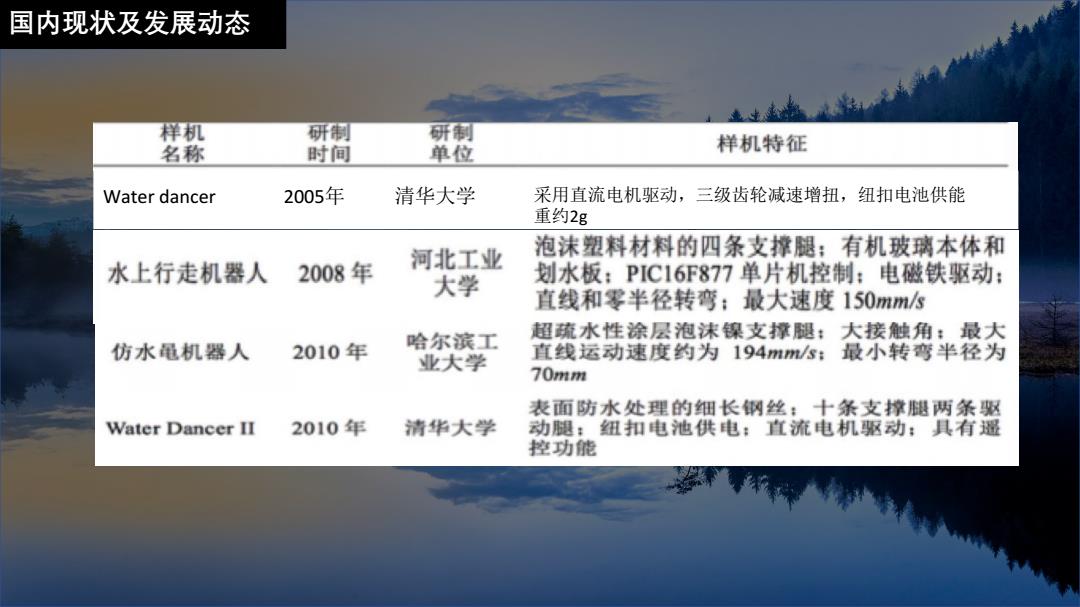
国内现状及发展动态 样机 研制 研制 名称 时间 单位 样机特征 Water dancer 2005年 清华大学 采用直流电机驱动,三级齿轮减速增扭,纽扣电池供能 重约2g 泡沫塑料材料的四条支撑腿:有机玻璃本体和 水上行走机器人 2008年 河北工业 大学 划水板:PIC16F877单片机控制:电磁铁驱动: 直线和零半径转弯:最大速度150mms 超疏水性涂层泡沫镍支撑腿:大接触角:最大 仿水龟机器人 2010年 哈尔滨工 业大学 直线运动速度约为194mms:最小转弯半径为 70mm 表面防水处理的细长钢丝:十条支撑腿两条驱 Water Dancer II 2010年 清华大学 动腿:纽扣电池供电:直流电机驱动:具有遥 控功能
国内现状及发展动态 Water dancer 2005年 清华大学 采用直流电机驱动,三级齿轮减速增扭,纽扣电池供能 重约2g
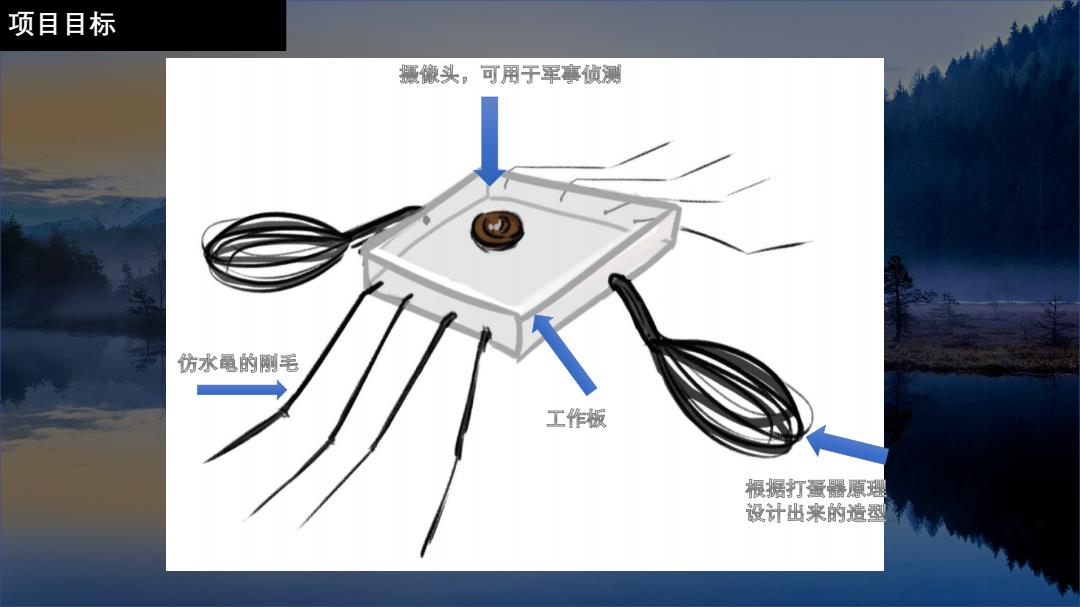
项目目标 摄像头,可用于军事侦测 仿水的刚毛 工作板 授据打蛋器原理 设计出来的造型
项目目标

1.漂浮问题 拟解决的问题 2驱动总体结构问题 &可行性分析 3控制问题 Reporter::薛郭子恺 4.能源问题
拟解决的问题 &可行性分析 1.漂浮问题 2.驱动总体结构问题 3.控制问题 Reporter:薛郭子恺 4.能源问题

拟解决的问题之一:漂浮问题 作为水上机器人,我们首先需要解决的问题便是如何使其漂 浮在水面上。同时,仿生机器人在水面上漂浮时,受到自重、负 载、波浪等因素的影响,要实现稳定漂浮就显得尤为重要。 -60s bafore rubbino 012 0.264 -60 s after
拟解决的问题之一:漂浮问题 作为水上机器人,我们首先需要解决的问题便是如何使其漂 浮在水面上。同时,仿生机器人在水面上漂浮时,受到自重、负 载、波浪等因素的影响,要实现稳定漂浮就显得尤为重要

水黾漂浮状态分析 水黾漂浮在水面上时,空气就会吸附在刚毛沟槽的空隙里面,形 成一层稳定的气膜,水分子就不能浸入到腿部表面的空隙里面,只能 压在腿部表面上,同时在空隙上就形成空气压力腔,所以水黾腿可以 压在水面上而不扎入水里,并能够保证水黾在水面上稳定地漂浮,使 得水黾腿部具有超疏水特性。 同时,水黾在平静的水面和有波动的水面上都能浮起并保持身体 的平衡,似乎水黾腿部还具有着弹簧的功能 与水面接触 b) c d) 图2-4水黾腿的弹簧性能
水黾漂浮状态分析 水黾漂浮在水面上时,空气就会吸附在刚毛沟槽的空隙里面,形 成一层稳定的气膜,水分子就不能浸入到腿部表面的空隙里面,只能 压在腿部表面上,同时在空隙上就形成空气压力腔,所以水黾腿可以 压在水面上而不扎入水里,并能够保证水黾在水面上稳定地漂浮,使 得水黾腿部具有超疏水特性。 同时,水黾在平静的水面和有波动的水面上都能浮起并保持身体 的平衡,似乎水黾腿部还具有着弹簧的功能