
第二部分 实验内容 实验系统简介 一、 系统总体结构 计算机辅助误差测控仪由计算机、计算机专用接口卡、测控电路板、机械本体、角位移检 测传感器、线位移检测传感器、步进电机及驱动控制器、驱动软件等组成。系统总体结构如图1 所示: 光栅尺 工作台 计算机 专用接口卡 「m差动螺母 蜗杆 丝杠 圆光栅 齿轮副 同步带 驱动 测控电路板 步进电机 步进电机 电机 线性电源 电机 图1-1系统总体结构示意图 机械本体包含机座、机架、滚动导轨、丝杠螺母副、差动螺母机构、两个步进电机、两个 位移检测传感器 寺 控制电柜包 一个+24V线性电源,两个步进电机驱动模块,以及一块控制电路板。 计算机机箱内安装了计算机控制接口卡,驱动软件安装于计算机系统中。 主轴驱动步进电机通过齿轮减速后(碱速比为4:),驱动丝杠作旋转运动,带动工作台沿 导轨作往复直线运动。另一台步进电机通过齿轮、蜗杆减速后(减速比为100:1),驱动差动螺 母作补偿运动。差动螺母与齿轮固联,其轴向固定,周向随齿轮的摆动而摆动。工作台除了可 在主轴步进电机驱动下作直线运动外,还可在补偿电机的驱动下产生直线运动。由此可知,工 作台沿导轨的直线位移可由二者的位移叠加而成。检测装置分别检测丝杠的角位移和工作台的 直线位移。其中角位移采用光电编码盘检测,直线位移采用光栅尺检测。在理想情况即不存在 误差的情况下,丝杠转角与工作台直线位移成正比关系,但实际上由于各种误差因素会影响这 种关系,因此,实际检测到的丝杠角位移与工作台直线位移的比值与理论 直相比存在若误差 本实 仪器就是利用计算机 检测和控制技术, 采用计数法对两路传感器反馈的代表位移量的 冲个数进行比较,动态求出每一个采样点的误差值(参数设置中的“采样点数”决定了将要测 量的误差数据的个数),每组误差数据形成一个误差数据文件,存储在计算机中,通过计算机对 误差数据进行各种处理和运算,得出并显示分析结果。此外,通过计算机检测控制技术,可实 时进行误差补偿、螺纹数控加工的仿真等
5 第二部分 实验内容 实验系统简介 一、 系统总体结构 计算机辅助误差测控仪由计算机、计算机专用接口卡、测控电路板、机械本体、角位移检 测传感器、线位移检测传感器、步进电机及驱动控制器、驱动软件等组成。系统总体结构如图 1 所示: 图 1-1 系统总体结构示意图 机械本体包含机座、机架、滚动导轨、丝杠螺母副、差动螺母机构、两个步进电机、两个 位移检测传感器等。 控制电柜包含一个+24V 线性电源,两个步进电机驱动模块,以及一块控制电路板。 计算机机箱内安装了计算机控制接口卡,驱动软件安装于计算机系统中。 主轴驱动步进电机通过齿轮减速后(减速比为 4∶1),驱动丝杠作旋转运动,带动工作台沿 导轨作往复直线运动。另一台步进电机通过齿轮、蜗杆减速后(减速比为 100∶1),驱动差动螺 母作补偿运动。差动螺母与齿轮固联,其轴向固定,周向随齿轮的摆动而摆动。工作台除了可 在主轴步进电机驱动下作直线运动外,还可在补偿电机的驱动下产生直线运动。由此可知,工 作台沿导轨的直线位移可由二者的位移叠加而成。检测装置分别检测丝杠的角位移和工作台的 直线位移。其中角位移采用光电编码盘检测,直线位移采用光栅尺检测。在理想情况即不存在 误差的情况下,丝杠转角与工作台直线位移成正比关系,但实际上由于各种误差因素会影响这 种关系,因此,实际检测到的丝杠角位移与工作台直线位移的比值与理论值相比存在着误差, 本实验仪器就是利用计算机检测和控制技术,采用计数法对两路传感器反馈的代表位移量的脉 冲个数进行比较,动态求出每一个采样点的误差值(参数设置中的“采样点数”决定了将要测 量的误差数据的个数),每组误差数据形成一个误差数据文件,存储在计算机中,通过计算机对 误差数据进行各种处理和运算,得出并显示分析结果。此外,通过计算机检测控制技术,可实 时进行误差补偿、螺纹数控加工的仿真等。 补偿 电机 工作台 差动螺母 蜗杆 齿轮副 计算机 专用接口卡 光栅尺 丝杠 驱动 电机 圆光栅 同步带 步进电机 驱动器 步进电机 驱动器 测控电路板 线性电源
系统中的角位移检测装置采用微型光电编码盘,其内部采用圆光栅,通过光电转换,将轴 旋转角位移转换成电脉冲信号。 其技术指标为:电源电压DC5V,每转输出脉冲数N=1000,输出信号波形如图2 图1-2光电编码盘输出信号波形 零位信B两路信号的相位差为90°,幅值为45,脉冲周期=360~N为A、B相脉冲数” 编码盘类似,只是用光栅尺替代圆光橱。其技术指标为:电源电压DC5Y,橱距为0.02毫米。 输出信号波形与光电编码盘类似。 系统中的丝杠采用经过普通车削加工后的丝杠,丝杠螺纹部分总长为200mm,丝杠导程为 2mm。 步进电机采用低电感、大电流、小惯量电机。其主要技术指标为:电压2.6V:相数2:电 流2A:步距角0.9Deg:最大静转矩61.74N.cm。 二、控制电路原理 计算机辅助误差测控仪包含两块控制电路板,一块为插在计算机总线扩展槽上的控制接口 卡,一块为安装在控制柜箱体内的手动控制电路板。其结构框图如图3所示: 计算机 计算机总线接口卡 尺信号 控制柜 光栅尺 步进电机 光电编 信 码盘 步进电机 线性电源
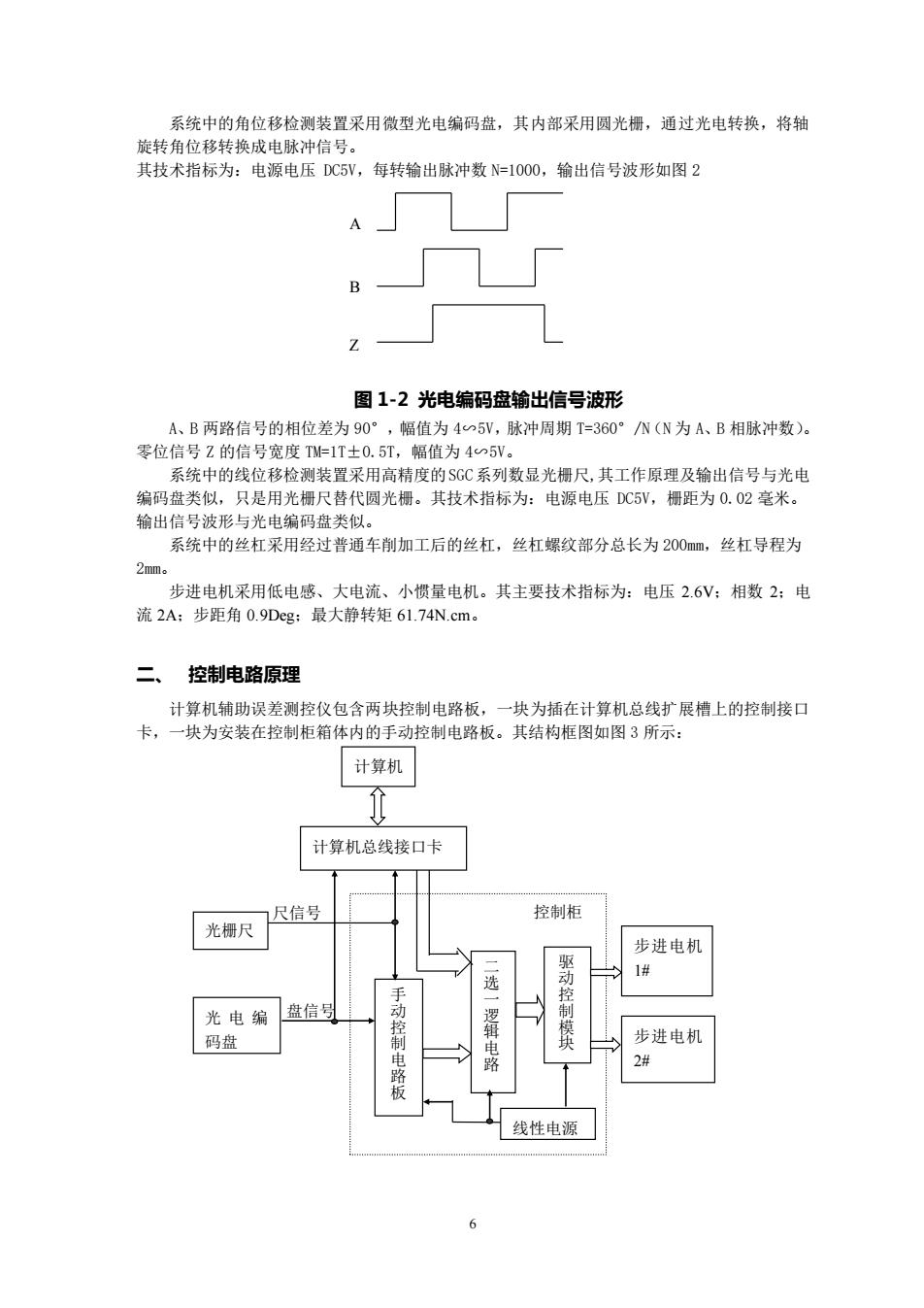
6 系统中的角位移检测装置采用微型光电编码盘,其内部采用圆光栅,通过光电转换,将轴 旋转角位移转换成电脉冲信号。 其技术指标为:电源电压 DC5V,每转输出脉冲数 N=1000,输出信号波形如图 2 图 1-2 光电编码盘输出信号波形 A、B 两路信号的相位差为 90°,幅值为 4∽5V,脉冲周期 T=360°/N(N 为 A、B 相脉冲数)。 零位信号 Z 的信号宽度 TM=1T±0.5T,幅值为 4∽5V。 系统中的线位移检测装置采用高精度的SGC系列数显光栅尺,其工作原理及输出信号与光电 编码盘类似,只是用光栅尺替代圆光栅。其技术指标为:电源电压 DC5V,栅距为 0.02 毫米。 输出信号波形与光电编码盘类似。 系统中的丝杠采用经过普通车削加工后的丝杠,丝杠螺纹部分总长为 200mm,丝杠导程为 2mm。 步进电机采用低电感、大电流、小惯量电机。其主要技术指标为:电压 2.6V;相数 2;电 流 2A;步距角 0.9Deg;最大静转矩 61.74N.cm。 二、 控制电路原理 计算机辅助误差测控仪包含两块控制电路板,一块为插在计算机总线扩展槽上的控制接口 卡,一块为安装在控制柜箱体内的手动控制电路板。其结构框图如图 3 所示: A B Z 二 选 一 逻 辑 电 路 驱 动 控 制 模 块 步进电机 1# 步进电机 2# 光栅尺 光电编 码盘 手 动 控 制 电 路 板 计算机 尺信号 盘信号 计算机总线接口卡 线性电源 控制柜