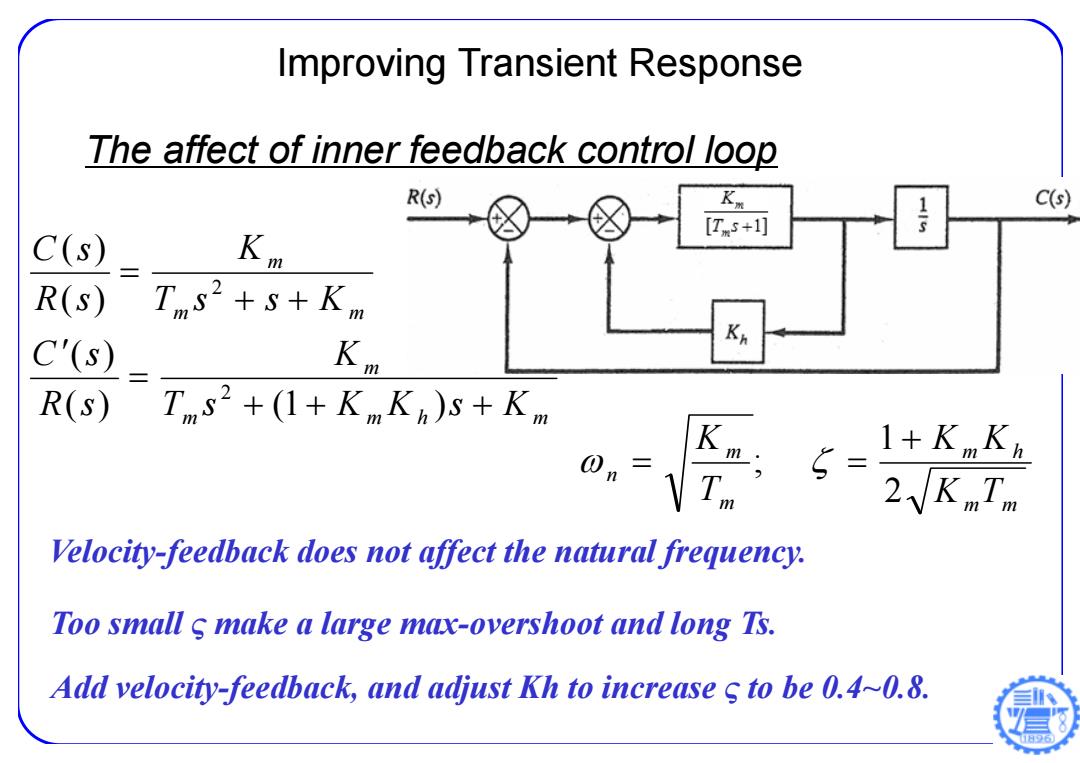
Improving Transient Response The affect of inner feedback control loop R(s) C(s) [Ts+1] C(s) Km R(s) Tms2+s+K C'(s) K Kh m R(s) Ts2+(1+KmKn)s+Km K, m 5= 1+KmKn 2KmTm Velocity-feedback does not affect the natural frequency. Too small make a large max-overshoot and long Ts. Add velocity-feedback,and adjust Kh to increase s to be 0.4-0.8
Improving Transient Response The affect of inner feedback control loop Velocity-feedback does not affect the natural frequency. Add velocity-feedback, and adjust Kh to increase ς to be 0.4~0.8. m m h m m m m m T s K K s K K R s C s T s s K K R s C s ( ) ( 1 ) ( ) ( ) ( ) 2 2 m m m h m m n K T K K T K 2 1 ; Too small ς make a large max-overshoot and long Ts

Example 5-2,Ogata,pp.236,V4 e For system with J=2kgm2,and b=1Nms,determine the values of K and K,so that the max-overshoot is 0.2 and the peak time is 1s. R(s) K C(s) 5+b Mn=e-G=0.2→5=0.456 π π tp =1→on=3.53rad/s 0a0nV1-52 =K/J=3.53rad/sK=24.92Nm K。=2(26@J-b)=0.218s K
Example 5-2, Ogata, pp.236, V4 • For system with J=2kgm 2, and b=1Nms, determine the values of K and K h, so that the max-overshoot is 0.2 and the peak time is 1s. 0.2 0.456 2 / 1 M e p t rad s n n d p 1 3.53 / 1 2 / 3.53 / 24.92 n K J rad s K Nm 1 (2 ) 0.218 K Jb s h n K
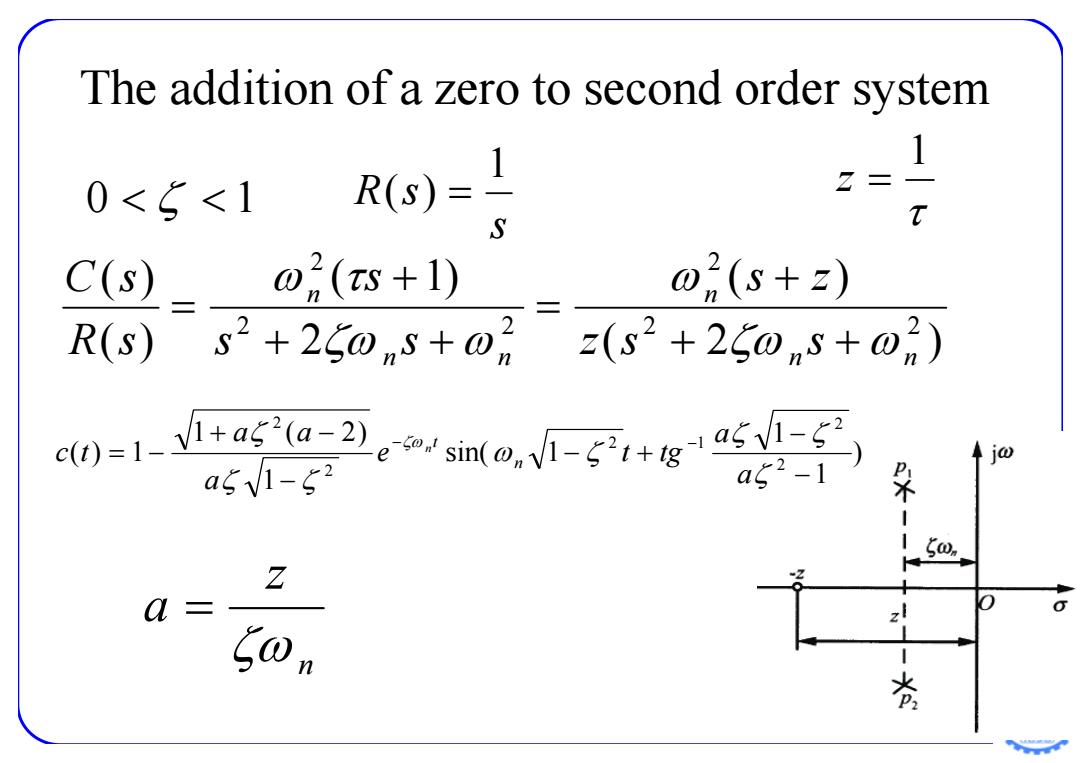
The addition of a zero to second order system 1 1 0<5<1 R(S)= Z= S T C(s) o2(S+1) 02(s+z) R(s) s2+260ns+07 z(s2+250nS+0) 0-1。wu发 a5V1-52 Z 2 a z 为
( 2 ) ( ) 2 ( 1) ( ) ( ) 2 2 2 2 2 2 n n n n n n z s s s z s s s R s C s 0 1 1 z s R s 1 ( ) ) 1 1 sin( 1 1 1 ( 2) ( ) 1 2 2 2 1 2 2 a a e t tg a a a c t n t n n z a The addition of a zero to second order system
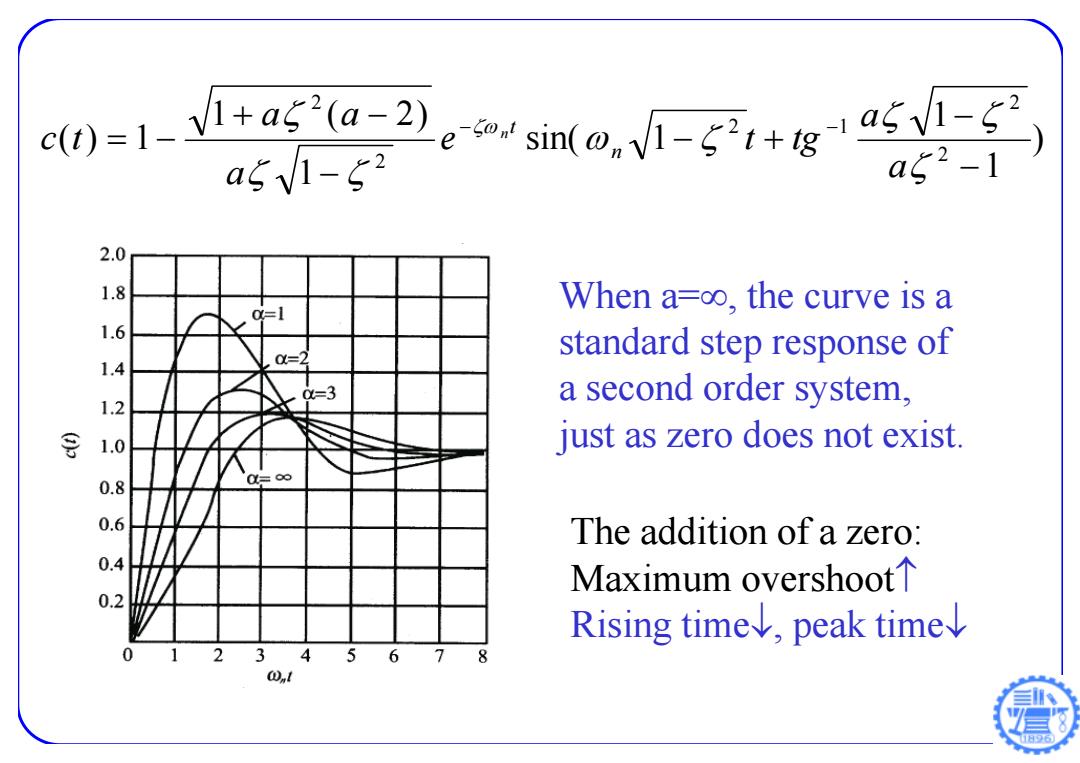
a012可,me-+gaf a5V1-52 2.0 1.8 When a=oo,the curve is a 0=1 1 14 0=2 standard step response of 0=3 a second order system, 1.2 号 1.0 just as zero does not exist. 0.8 0=∞ 0.6 The addition of a zero: 0.4 Maximum overshoot'个 0.2 Rising timev,peak time 0 2 6 7 8 @
When a=, the curve is a standard step response of a second order system, just as zero does not exist. ) 1 1 sin( 1 1 1 ( 2) ( ) 1 2 2 2 1 2 2 a a e t tg a a a c t n t n The addition of a zero: Maximum overshoot Rising time, peak time
The addition of a zero to system c0=1-1+a5a=2)esin(o.V-5+ga51- a5V1-52 a2-1 Closed loop zero: Affect the magnitude and phase angle of the transient response. Does not affect decay ratio,damping ratio and the frequency >The response curve is determined by closed-loop poles. >Detailed shape is by closed-loop poles and zeros
Closed loop zero: Affect the magnitude and phase angle of the transient response. Does not affect decay ratio, damping ratio and the frequency The response curve is determined by closed-loop poles. Detailed shape is by closed-loop poles and zeros. ) 1 1 sin( 1 1 1 ( 2) ( ) 1 2 2 2 1 2 2 a a e t tg a a a c t n t n The addition of a zero to system