2.1概述 2.1.3 数控机床的坐标系 2.1.3.1轴的概念及定义 2.1.3.2轴名的确定 2.1.3.3机床坐标系与工件坐标系 6
6 2.1.3 数控机床的坐标系 2.1.3.1 轴的概念及定义 2.1.3.2 轴名的确定 2.1.3.3 机床坐标系与工件坐标系 2.1 概述
2.1概述 2.1.3.1轴的概念及定义 >目的 为简化编程和保证程序的通用性,对数控机床的坐标轴和方向命 名制订了统一的标准。 >分类 基本坐标轴:规定直线进给坐标轴用X、了、俵示。 回转坐标轴:围绕X,Y,Z轴旋转的圆周进给坐标轴分别用A、B、 C表示。 附加坐标轴:平行于基本坐标系中坐标轴的进给轴,用U、V、W 表示。 湖
7 目的 主要内容 为简化编程和保证程序的通用性,对数控机床的坐标轴和方向命 名制订了统一的标准。 分类 基本坐标轴:规定直线进给坐标轴用X、Y、Z表示。 回转坐标轴:围绕X,Y,Z轴旋转的圆周进给坐标轴分别用A、B、 C表示。 附加坐标轴:平行于基本坐标系中坐标轴的进给轴,用U、V、W 表示。 2.1.3.1 轴的概念及定义 2.1 概述
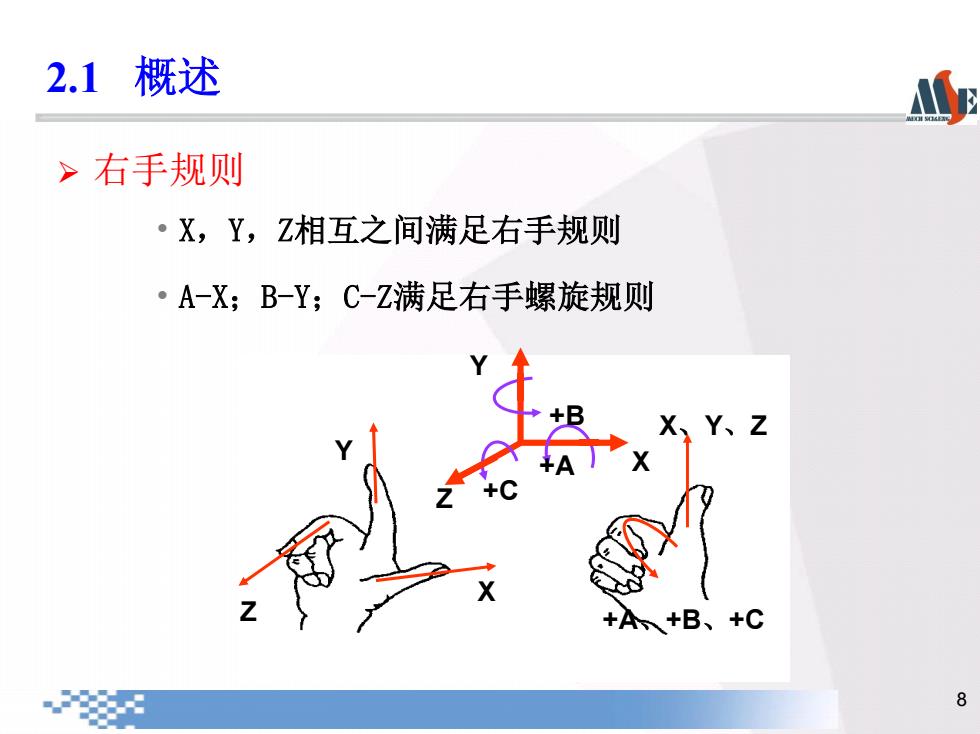
2.1概述 >右手规则 ·X,Y,Z相互之间满足右手规则 ·A-X;B-Y;C-Z满足右手螺旋规则 Y、Z +A+B、+C 8
8 主要内容 右手规则 • X,Y,Z相互之间满足右手规则 • A-X;B-Y;C-Z满足右手螺旋规则 X Y Z X、Y、Z +A、+B、+C X Z Y +C +B +A 2.1 概述

2.1概述 >进给运动的两种方式 ·主轴带动刀具运动; ·工作台带着工件运动。 >坐标轴的正方向 ·假定工件不动,刀具相对于工件做远离工件的运动 方向; ·机床坐标轴的方向取决于机床的类型和各组成部分 的布局。 9
9 主要内容 进给运动的两种方式 • 主轴带动刀具运动; • 工作台带着工件运动。 坐标轴的正方向 • 假定工件不动,刀具相对于工件做远离工件的运动 方向; • 机床坐标轴的方向取决于机床的类型和各组成部分 的布局。 2.1 概述
2.1概述 2.1.3.2轴名的确定 >Z座标轴的确定 Z座标轴:平行主轴轴线的进给轴。 ·没有主轴或有多个主轴: 垂直于工件装夹面的方向为Z座标。 ·主轴能摆动: 在摆动的范围内只与标准座标系中的某一座标平行时,则这 个坐标便是Z坐标轴; 若在摆动的范围内与多个座标平行,则取垂直于工件装夹面 的方向为Z座标轴。 10
10 主要内容 Z座标轴的确定 Z座标轴:平行主轴轴线的进给轴。 •没有主轴或有多个主轴: 垂直于工件装夹面的方向为Z座标。 •主轴能摆动: 在摆动的范围内只与标准座标系中的某一座标平行时,则这 个坐标便是Z坐标轴; 若在摆动的范围内与多个座标平行,则取垂直于工件装夹面 的方向为Z座标轴。 2.1.3.2 轴名的确定 2.1 概述