
第七章、从二维图形到三维图形 知识点: 1、捕捉工具 2、阵列工具 2、常用转换工具-车削、挤出
知识点: 1、捕捉工具 2、阵列工具 2、常用 转换工具-车削、挤出
第一讲:捕捉工具和车削修改

1、捕捉工具 ,捕捉功能是为了能更好地在三维空间中锁定捕获需要的位 置,以便进行选择、建立、编辑、修改等操作。快捷键$ ,关于捕捉设定,系统提供了三个空间,包括二维、二点五 维、和三维。 ,2 D Snap(二维捕捉):捕捉在当前视图中栅格平面上的 曲线和无厚度的表面造型,对于有体积的造型将不予捕捉。 通常用于平面图形的捕捉。 ,2.5 D Snap(二点五维捕捉):这是一个介于二维和三维空 间的捕捉方法,可捕捉当前平面上的点、线、也可捕捉三 维空间的物体在当前平面上的投影。 ,3 D Snap(三维捕捉):直接在三维空间中捕捉三维物体, 包括所有类型的物体
捕捉功能是为了能更好地在三维空间中锁定捕获需要的位 置,以便进行选择、建立、编辑、修改等操作。快捷键S 关于捕捉设定,系统提供了三个空间,包括二维、二点五 维、和三维。 2D Snap(二维捕捉):捕捉在当前视图中栅格平面上的 曲线和无厚度的表面造型,对于有体积的造型将不予捕捉。 通常用于平面图形的捕捉。 2.5D Snap(二点五维捕捉):这是一个介于二维和三维空 间的捕捉方法,可捕捉当前平面上的点、线、也可捕捉三 维空间的物体在当前平面上的投影。 3D Snap(三维捕捉):直接在三维空间中捕捉三维物体, 包括所有类型的物体
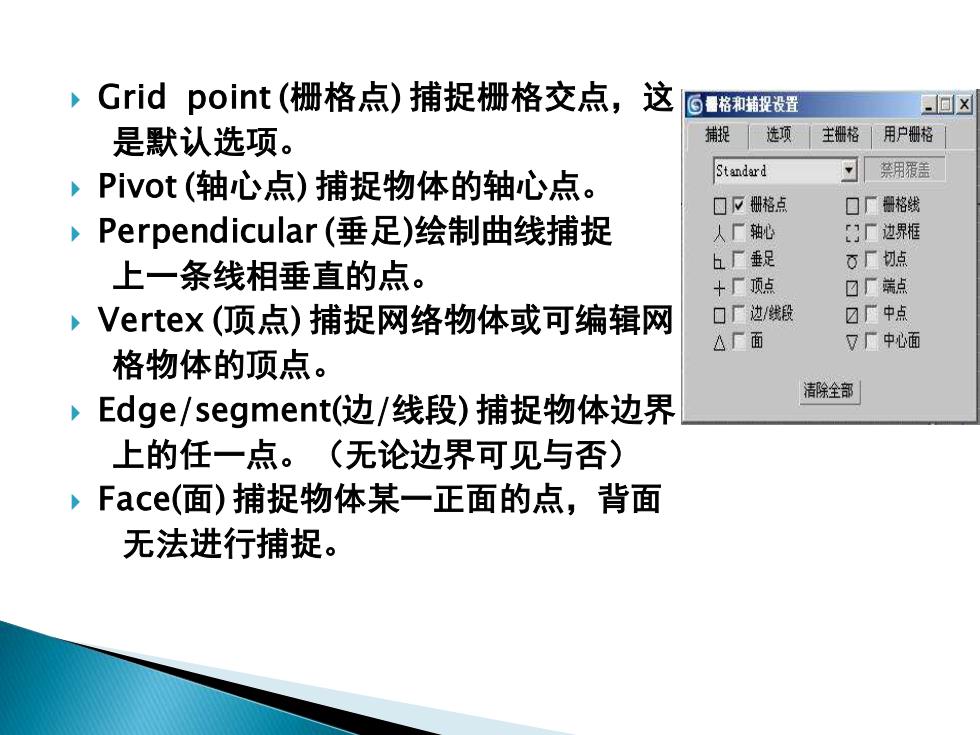
Grid point(栅格点)捕捉栅格交点,这回看格提资置 回 是默认选项。 捕捉选项主栅格用户栅格 ,PVot(轴心点)捕捉物体的轴心点。 Standard 习禁用豭盖 ☐栅格点 ☐厂栅格线 ,Perpendicular(垂足)绘制曲线捕捉 人厂轴心 ?「边界框 上一条线相垂直的点。 h厂垂足 百厂切点 十厂顶点 ☑「端点 ,Vertex(顶点)捕捉网络物体或可编辑网 口厂边/线段 ☑「厂中点 △「面 7厂中心面 格物体的顶点。 ,Edge/segment(边/线段)捕捉物体边界 清除全部 上的任一点。(无论边界可见与否) ,Face(面)捕捉物体某一正面的点,背面 无法进行捕捉
Grid point (栅格点) 捕捉栅格交点,这 是默认选项。 Pivot (轴心点) 捕捉物体的轴心点。 Perpendicular (垂足)绘制曲线捕捉 上一条线相垂直的点。 Vertex (顶点) 捕捉网络物体或可编辑网 格物体的顶点。 Edge/segment(边/线段) 捕捉物体边界 上的任一点。(无论边界可见与否) Face(面) 捕捉物体某一正面的点,背面 无法进行捕捉
,Grid lines(栅格线)捕捉栅格线上的任意点。 ,Bounding box(边界框)捕捉物体边界上的八个角。 ,Tangent(切点)捕捉样条曲线上与相对于前一选择点相切 的点,或圆上的四个像限点。 ,Endpoint(端点)捕捉边界或样条曲线的端点。 ,Midpoint(中点)捕捉边界或样条曲线的端点。 ,Center face(中心面)捕捉物体三角面的中心o ⑤看格和埔捉设置 回x 捕捉选项主栅格用户需格 Standard 习禁用覆盖 ☐W栅格点 □厂册格线 人■轴心 [3厂边界框 口厂垂足 δ口切点 十厂顶点 ☑■端点 口边线段 ☑Γ中点 △厂面 7厂中心面 清除全部
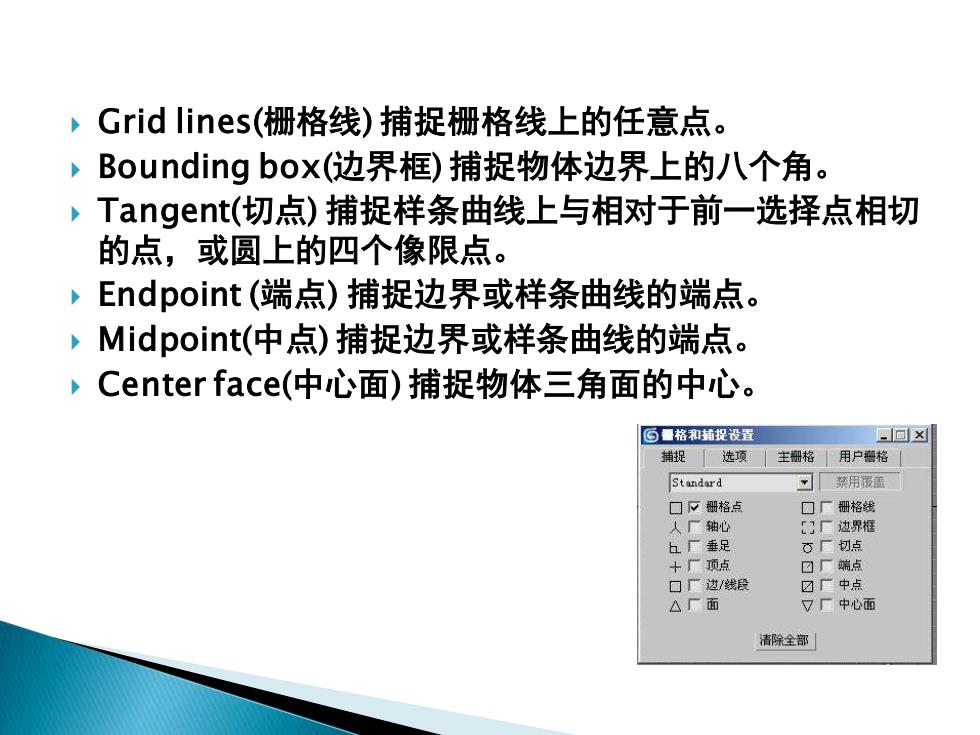
Grid lines(栅格线) 捕捉栅格线上的任意点。 Bounding box(边界框) 捕捉物体边界上的八个角。 Tangent(切点) 捕捉样条曲线上与相对于前一选择点相切 的点,或圆上的四个像限点。 Endpoint (端点) 捕捉边界或样条曲线的端点。 Midpoint(中点) 捕捉边界或样条曲线的端点。 Center face(中心面) 捕捉物体三角面的中心