
内容要点 第一节预测控制的发展 1预测控制的发展 ·现代控制理论的发展与特点 先进控制技术 2预测控制的基本原理 ·特点 3模型算法控制(MAC) ,状态空间分析法 ·最优性能指标设计 模型预测控制 4动态矩阵控制(DMC) 。应用 5状态反馈预控制(SFPC) ·航天、航空等军事领域 6多变量协调预测控制 。要求 ·精确的数学模型 第一节预测控制的发展 第一节预测控制的发展 第一节预测控制的发展 。工业过程的特点 1978年,Richalet、Mehra提出了基于脉冲响应的模型预 预测控制有关公司及产品 ·多变量高维复杂系统难以建立精确的数学模型 测启发控制Model Predictive Heuristic Control, 。SetPoint:IDCOM ,工业过程的结构、参数以及环境具有不确定性 MPHC).后转化为模型算法控制odelAlgorithmic ·DMC:DMC Control,MAC) 时变性、非线性,最优控制难以实现 .AspenTech:SetPoint Inc:SMC.IDCOM 1979年,Cutert提出了基于阶跃响应的动态矩阵控制 DMC Corp DMCplus 。预测控制的产生 (Dynamic Matrix Control,DMC) ◆Profimaties:PCT ,基于模型的控制,但对模型的要求不高 19然7年,Crke提出了基于时间序列模型和在线辨识的 .Honeywell:Profimatics RMPCT ·采用动优化策路,以局部优化取代全局最优 广义预美控制Generalized Predictive Control,GPC) 。Adersa法:HIECON 利用实测信息反馈校正,增强控制的鲁棒性 188年,袁碳提出了基于离散状态空问横型的状态反馈预 .Invensys Predictive Control Ltd:Connoisseur (State Feedback Predictive Control,SFPC) ·DOT英:STAR 1
1 先进控制技术 模型预测控制 内容要点 1 预测控制的发展 2 预测控制的基本原理 3 模型算法控制(MAC) 4 动态矩阵控制(DMC) 5 状态反馈预测控制(SFPC) 6 多变量协调预测控制 第一节 预测控制的发展 现代控制理论的发展与特点 特点 状态空间分析法 最优性能指标设计 应用 航天、航空等军事领域 要求 精确的数学模型 第一节 预测控制的发展 工业过程的特点 多变量高维复杂系统难以建立精确的数学模型 工业过程的结构、参数以及环境具有不确定性、 时变性、非线性,最优控制难以实现 预测控制的产生 基于模型的控制,但对模型的要求不高 采用滚动优化策略,以局部优化取代全局最优 利用实测信息反馈校正,增强控制的鲁棒性 第一节 预测控制的发展 1978年,Richalet 、Mehra提出了基于脉冲响应的模型预 测启发控制(Model Predictive Heuristic Control , MPHC),后转化为模型算法控制(Model Algorithmic Control,MAC) 1979年,Cutler提出了基于阶跃响应的动态矩阵控制 (Dynamic Matrix Control,DMC) 1987年,Clarke 提出了基于时间序列模型和在线辨识的 广义预测控制(Generalized Predictive Control, GPC) 1988年,袁璞提出了基于离散状态空间模型的状态反馈预 测控制(State Feedback Predictive Control, SFPC) 第一节 预测控制的发展 预测控制有关公司及产品 SetPoint : IDCOM DMC : DMC AspenTech: SetPoint Inc : SMC- IDCOM DMC Corp : DMCplus Profimatics: PCT Honeywell : Profimatics : RMPCT Adersa(法) : HIECON Invensys : Predictive Control Ltd : Connoisseur DOT(英) : STAR
第一节预测控制的发展 第二节预测控制的基本原理 第二节预测控制的基本原理 预控制的特点 模型预测控制与PD控制 ·建模方便,对模型要求不高 。PD控制:根据过程当前的和过去的输出测量 在练优化 受控过程 ·滚动的优化策路,具有较好的动态控制效果 值和给定值的偏差来确定当前的控制输入 。简单实用的反馈校正,有利于提高控制系统的 ·预测控制:不仅利用当前的和过去的偏差值, 动迹 鲁棒性 而目还利用预测模型来预测过程未来的偏差值, 型 +依月的 。不增加理论困难,可推广到有约束条件、大纯 以滚动优化确定当前的最优控制策略,使未来 滞后、非最小相位及非线性等过程 一段时间内被控变量与期望值偏差最小 反城校正 ·是一种计算机优化控制算法 ·从基本思想看,预测控制优于PHD控制 三要素:预测模型这动忧化反馈校正 第二节预测控制的基本原理 第二节预测空用制的基本原理 第二节预测控制的基本原理 预测模型(内部模型) 预测模型(内部模型) 滚动优化(在线优化 。预测模型的功能 ·基于模型的预测示意图 。最优控制 根据被控对象的历史信息{(化-,Jk-办1 来 通过使某一性能指标最优化来确定其未来的控制作用的 21}和末来输入{uk+j-1)j=1,,m,预测 ·局部优化 系统未来响应{k+)j=1,,叶 不是采用一个不变的全局最优目标,而是采用笼动式的 ·预测模型形式 有限时域优化策。在每一采样时刻,根摆该时刻的优 化性能指标,求解该时刻起有限时段的最优控制率 ·参数模型:如微分方程、差分方程 。在线滚动 。非参数模型:如脉冲响应、阶跃响应 时阅 1一拉制策路1 计算得到的控制作用序列也只有当前值是实际执行的】 一对应于控制铺略1的的出 2一拉制策略Ⅱ ↓对应于控制前略亚的输出 在下一个采样时刻又重新求取最优控制率 2
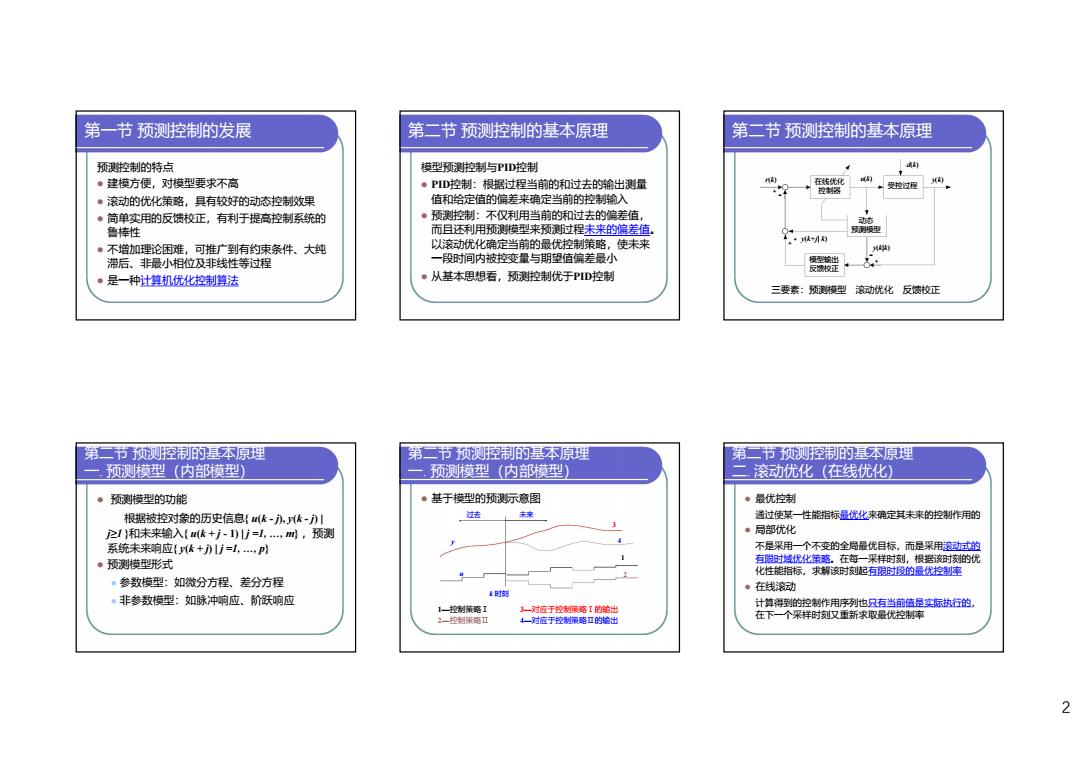
2 第一节 预测控制的发展 预测控制的特点 建模方便,对模型要求不高 滚动的优化策略,具有较好的动态控制效果 简单实用的反馈校正,有利于提高控制系统的 鲁棒性 不增加理论困难,可推广到有约束条件、大纯 滞后、非最小相位及非线性等过程 是一种计算机优化控制算法 第二节 预测控制的基本原理 模型预测控制与PID控制 PID控制:根据过程当前的和过去的输出测量 值和给定值的偏差来确定当前的控制输入 预测控制:不仅利用当前的和过去的偏差值, 而且还利用预测模型来预测过程未来的偏差值。 以滚动优化确定当前的最优控制策略,使未来 一段时间内被控变量与期望值偏差最小 从基本思想看,预测控制优于PID控制 第二节 预测控制的基本原理 d(k) r u(k) (k) 在线优化 y(k) 控制器 受控过程 + _ 动态 预测模型 + y(k+j| k) + _ y(k|k) 模型输出 反馈校正 + 三要素:预测模型 滚动优化 反馈校正 第二节 预测控制的基本原理 一. 预测模型(内部模型) 预测模型的功能 根据被控对象的历史信息{ u(k - j), y(k - j) | j≥1 }和未来输入{ u(k + j - 1) | j =1, …, m} ,预测 系统未来响应{ y(k + j) | j =1, …, p} 预测模型形式 参数模型:如微分方程、差分方程 非参数模型:如脉冲响应、阶跃响应 第二节 预测控制的基本原理 一. 预测模型(内部模型) 基于模型的预测示意图 过去 未来 3 y 4 1 u 2 k 时刻 1—控制策略Ⅰ 2—控制策略Ⅱ 3—对应于控制策略Ⅰ的输出 4—对应于控制策略Ⅱ的输出 第二节 预测控制的基本原理 二. 滚动优化(在线优化) 最优控制 通过使某一性能指标最优化来确定其未来的控制作用的 局部优化 不是采用一个不变的全局最优目标,而是采用滚动式的 有限时域优化策略。在每一采样时刻,根据该时刻的优 化性能指标,求解该时刻起有限时段的最优控制率 在线滚动 计算得到的控制作用序列也只有当前值是实际执行的, 在下一个采样时刻又重新求取最优控制率
第二节预测控制的基本原理 第二节预测控制的基本原理 第二节预测控制的基本原理 二滚动优化(在线优化) 三,反馈校正(误差校正) 三反馈校正(误差校正) ·滚动优化示意图 。模型失配 ·反馈校正示意图 一。时刻优化 1一参考轨迹y,虚线) 实际被控过程存在非线性、时变性,不确定性等原因, 2 一最优测验出实线) 使基于模型的倾测不可能准确地与实际被控过程相符 3 3一最优控制作用山 。反馈校正 在每个采样时刻,都变通过止实标测到的地出信息对基王 横型的预测输出进行修正,然后再进行新的优化 ·闭环优化 不断根据系统的实际输出对预刻输出作出修正,使滚动 优化不但基于模型,而且利用反继信息,构成闭环优化 -时京的预蛇出3一量+1时测误差 14+1时刺输出 4一上+1时刻校正后的预测绘出 + 第三节模型算法控制(MAC) 第三节模型算法控制MAC 第三节模型算法控制(MAC 一预测模型 一预测模型 。模型算法控制(Model Algorithmic Control): 。MAC的预测模型 。MAC算法中的模型参数 基于脉冲响应模型的预测控制,又称模型预测测 新近稳定线性被控对家的单位脉冲咽应曲线 ,有限脉冲跑应Finite Impulse Response,FIR) 启发式控制MPHC) =h,A,,h可完全描述系统的动态待性 。60年代末,Richalet等人在法国工业企业中应用 有限个采样周期后 ,N称为建模时域 于锅炉和精馏塔的控制 im in =0 ·系统的渐近稳定性 。主要内容 。保证了模型可用有限的脉冲响应描述 预测模型反馈校正参考轨迹滚动优化 ·系统的线性 系统的离散球冲响应示意图 ,保证了可用线性系统的迭加性 3
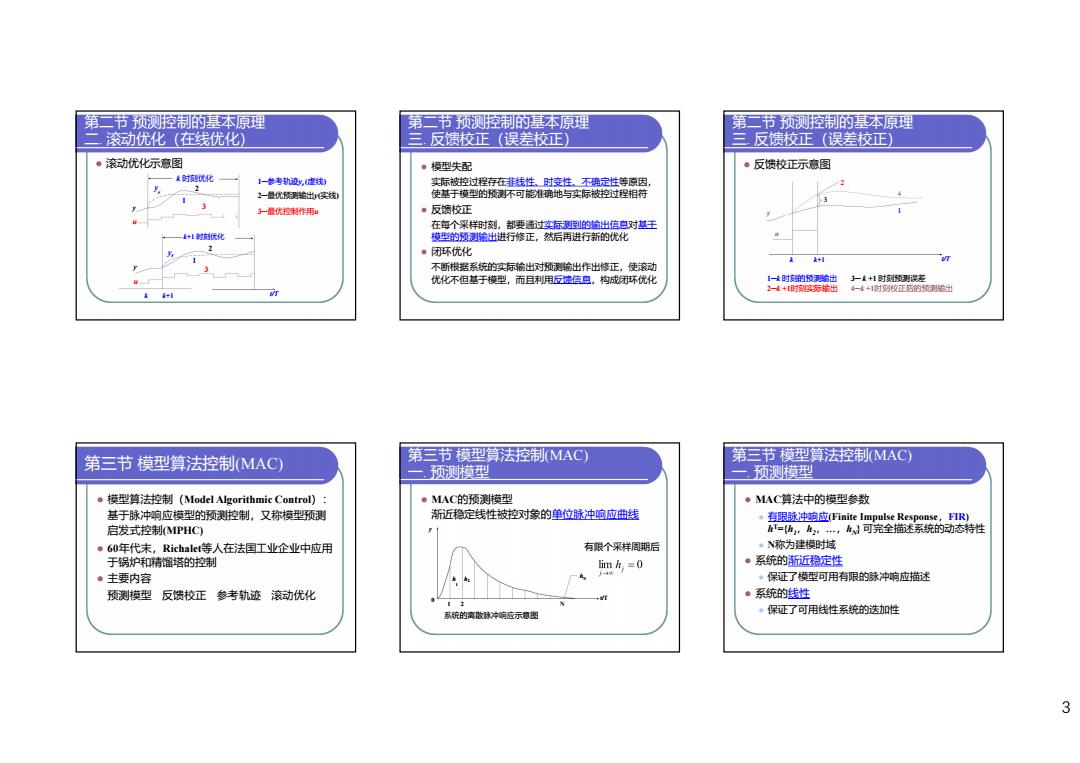
3 第二节 预测控制的基本原理 二. 滚动优化(在线优化) 滚动优化示意图 k 时刻优化 1─参考轨迹y (虚线) r y 2 r 2─最优预测输出y(实线) 1 y 3 3─最优控制作用u u k+1 时刻优化 2 yr 1 3 yu k k+1 t/T 第二节 预测控制的基本原理 三. 反馈校正(误差校正) 模型失配 实际被控过程存在非线性、时变性、不确定性等原因, 使基于模型的预测不可能准确地与实际被控过程相符 反馈校正 在每个采样时刻,都要通过实际测到的输出信息对基于 模型的预测输出进行修正,然后再进行新的优化 闭环优化 不断根据系统的实际输出对预测输出作出修正,使滚动 优化不但基于模型,而且利用反馈信息,构成闭环优化 第二节 预测控制的基本原理 三. 反馈校正(误差校正) 反馈校正示意图 2 4 3 1 y u k k+1 t/T 1─k 时刻的预测输出 3─ k +1 时刻预测误差 2─k +1时刻实际输出 4─k +1时刻校正后的预测输出 第三节 模型算法控制(MAC) 模型算法控制(Model Algorithmic Control): 基于脉冲响应模型的预测控制,又称模型预测 启发式控制(MPHC) 60年代末,Richalet等人在法国工业企业中应用 于锅炉和精馏塔的控制 主要内容 预测模型 反馈校正 参考轨迹 滚动优化 第三节 模型算法控制(MAC) 一. 预测模型 MAC的预测模型 渐近稳定线性被控对象的单位脉冲响应曲线 y 有限个采样周期后 j h h hN 2 1 0 t/T 1 2 N 系统的离散脉冲响应示意图 第三节 模型算法控制(MAC) 一. 预测模型 MAC算法中的模型参数 有限脉冲响应(Finite Impulse Response,FIR) hT={h1 2 N ,h ,…,h } 可完全描述系统的动态特性 N称为建模时域 系统的渐近稳定性 保证了模型可用有限的脉冲响应描述 系统的线性 保证了可用线性系统的迭加性
第三节模型算法控制MAC) 第三节模型算法控制MAC) 第三节模型算法控制MAC 一预测模型 一预测模型 一预测模型 )-0 。采用脉冲响应模型对末来时交刻输出进行预测 2=h,24(0)+r) 3)=hM(0)+r0 X.k+=之k+-0j=L2,P 34=,(0)+h P称为硬测时域 S)=h0+b) ●取u(k+在i=M-1后保持不变 12456 T肉-2u-0 (k+i)■(k+M-)i■M,M+l,…,P-1 ()=[g(und(-uldu M称为控制时域,M<P T 0a1 T 第三节模型算法控制MAC) 第三节模型算法控制(MAC】 第三节模型算法控制(MAC) 一预测模型 一预测模型 一预测模型 ●末来输出值的P步预测值 伙40 t-0k- Y (k)-HU()4HU() F.04◆2 树t+非 城-0 传+办-2+1-0l2,4- + 4+M-)+-2t+- 只+0-空+M-+立+-0-M,M+1P ++自 +M-0t+M-)t+-2到… 控制作用可分为两步 + U)=k-N+-N+2)…W-1三知控制作用 t-N+2 达-N+AM0 U,=肉k+)…+M-。未知控制作用 a达-N+M+0 U,)-u使-N+山t-N+2k- 叫t+M-2斗以+M-引… 以+P-NJ色 -同4+n…6+- 4
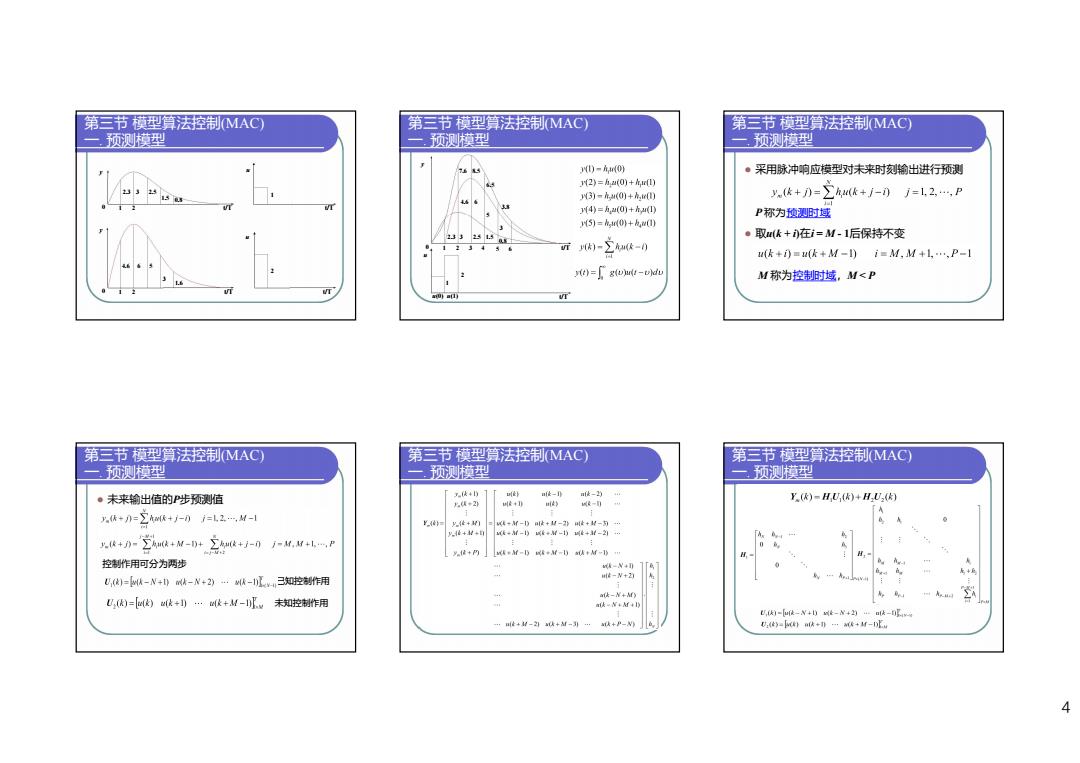
4 第三节 模型算法控制(MAC) 一. 预测模型 u y 2.3 3 2 2.5 1 1.5 0.8 0 1 t/T t/T y u 4.6 6 5 2 3 1.6 0 1 2 t/T t/T 第三节 模型算法控制(MAC) 一. 预测模型 y 7.6 8.5 1 6.5 5 2 1 3 2 4.6 6 3.8 4 3 y(5) h u(0) h u(1) 5 4 3 N 2.3 3 2 2.5 1.5 4 0.8 5 y(k) h u(k i) i 0u 1 3 t/T t/T 6 i 1 y(t) g( )u(t )d 0 2 1 u(0) u(1) 第三节 模型算法控制(MAC) 一. 预测模型 采用脉冲响应模型对未来时刻输出进行预测 N ym i (k j) hu(k j i) j 1, 2, , P i 1 P 称为预测时域 取u(k + i)在i = M - 1后保持不变 M 称为控制时域,M < P 第三节 模型算法控制(MAC) 一. 预测模型 未来输出值的P步预测值 N ym i (k j) h u(k j i) j 1, 2, , M 1 i 1 j M 1 N ym (k j) h ui i (k M 1) h u(k j i) j M , M 1, , P i 1 i j M 2 控制作用可分为两步 U (k) u(k N 1) u(k N 2) u(k 1 1T (N 1)已知控制作用 U (k) u(k) u(k 1) u(k M 1) 未知控制作用 T 2 1 M 第三节 模型算法控制(MAC) 一. 预测模型 y (k 1) u(k) u(k 1) u(k) u(k 2) m y (k 2) u(k 1) u(k 1) m Ym m (k) y (k M ) u(k M 1) u(k M 2) u(k M 3) y (m k M 1) u k( 1) ( 1) ( 2) M u k M u k M ym (k P) u(k M 1) u(k M 1) u(k M 1)u(k N 1) u(k N 2) h1 h2 u(k N M ) u k ( N M1) u(k M 2) u(k M 3) u(k P N) h N 第三节 模型算法控制(MAC) 一. 预测模型 Y (k) H U (k) H U (k) m 1 1 2 2 1 h h h 0 2 1 N h hN 1 h2 0 h N h 3 H H 2 1 hM hM 1 h 1 h h 2 0 hM 1 h hM N hP 1 1 P (N 1) P M 1 P i h hP 1 hP M 2 h i 1 P M T 1 1 (N 1) T 2 1 M

第三节模型算法控制MAC 第三节模型算法控制MAC】 第三节模型算法控制MAC 反馈校正 三,设定值与参考轨迹 三设定值与参考轨迹 以当前过程输出测量值与模型计算值之差格正模型衡测值 预测控制并不是要求输出迅速跟踪设定值,而 根据设定值和当前过程输出测量值确定参考轨迹 yn(k+D=y.(k+0+E[y)-y()/-12…,P 是使输出按一定轨迹缓慢地跟踪设定值 最广泛使用的参考轨迹为一阶指数变化形式 因-24at-0 y(h+)=a'yk)+1-a)yj=L2.…,P 对于P步预测 工,—采样周期 Y-(k)=Y()+Be(k) 口=e子I一参考轨迹的时涧常数 y一当前时刻过程输出 k)-)-y() B=RB…BT 一设定值 y)=k+)y传+2)…yk+P Y)=[y传+0y+2)…,k+P 第三节模型算法控制MAC 第三节模型算法控制MAC) 四最优控制 四.最优控制 第三节模型算法控制MAC) 优化控制的目标通数 最优控制率为 minJ-y)-卫.无+U, U()-HQH+RHQY.()-H,U,()-Be(k] 泰考这视y 法] =()-(()RU() 0-dingl.4…g】R-dig5…] 对象 代入Y) 现时刻的最优控制作用 横型 /=[HU)+H,U,)+)-了(CH,C,+HU,+)-y U:()=Dy.k)-HU,(W)-B] +码伏RU) 求解最优控制率 U偏0 D=l0…0l.r[HQH2+RH0 横型算法控制原理示意图 5
5 第三节 模型算法控制(MAC) 二. 反馈校正 以当前过程输出测量值与模型计算值之差修正模型预测值 y (k j) y (k j) y(k) y ( k) , P P m j m N y (k) hu(k i) m i 对于P步预测 Y (k) Y (k) βe(k) P m e(k) y(k) y (k) β β β βT m 1 2 P Y (k) y (k 1) y (k 2) y (k T P P P P 1 P 第三节 模型算法控制(MAC) 三. 设定值与参考轨迹 预测控制并不是要求输出迅速跟踪设定值,而 是使输出按一定轨迹缓慢地跟踪设定值 过去 未来 yd y (k) r y(k) y (k) P u(t) t/T k k+1 k+P 第三节 模型算法控制(MAC) 三. 设定值与参考轨迹 根据设定值和当前过程输出测量值确定参考轨迹 最广泛使用的参考轨迹为一阶指数变化形式 j j yr d (k j) j 1, 2, , P T —— s 采样周期 T ——参考轨迹的时间常数 y(k)——当前时刻过程输出 T s eT y —— d 设定值 Y (k) y (k 1) y (k 2) y (k T r r r r 1 P 第三节 模型算法控制(MAC) 四. 最优控制 优化控制的目标函数 2 2 min J Y (k) Y (k) U (k) P r Q R 2 Y (k) Y (k) Q Y (k) Y (k) U T T P r P r 2 2 代入Y (k) P T 1 1 2 2 r 1 1 2 2 r U T (k)RU (k) 2 2 J 求解最优控制率 0 U (k) 2 第三节 模型算法控制(MAC) 四. 最优控制 最优控制率为 U (k) H QH R H Q Y (k) H U (k) βe(k) 1 2 2 2T 2T r 1 1 Q diag 1 2 q q P q R 1 2 diag r r M 现时刻k的最优控制作用 U (k) D Y (k) H U (k) βe(k) T 2 r 1 1 D 1 0 1 T T T 1 M 第三节 模型算法控制(MAC) y r 参考轨迹模型 优化算法 u y minJ 对象 y (k+i) r yd y 模型 m y (k+i) m yP 预测 y (k+i) P e 模型算法控制原理示意图