
第四节动态矩阵控制DMC) 第四节动态矩阵控制DMC】 第四节动态矩阵控制DMC 一预测模型 一预测测模型 ●动态矩阵控制(Dynamic Matrix Control): 。DMC的预测摸型 ·DMC算法中的模型参数 基于阶跃响应模型的预测控制 新近稳定线性被控对象的单位阶跃响应曲线 ◆有限集合=a,4,…,a中的参数可以完全 ·1973年,DMC应用于美国壳牌石油公司的生产 模型断 描述系统的动态特性 装路上 ·称为建模时域 有限个采样 ·1979年,Cutler等在美国化工学会年会上首次 周妮后 ·系统的近稳定性 介绍了DMC算法 aw() ·保证了模型可用有限的阶跃响应描述 ·主要内容 ·系统的线性 预测模型 反馈校正参考轨迹滚动优化 3 ·保证了可用线性系统的迭加性 系统的离散单位阶响应示意图 第四节动态矩阵控制DMC 第四节动态矩阵控制DMC】 第四节动态矩阵控制(DMC 一预测模型 一预测模型 一预测摸型 8 14 3 3 6
6 第四节 动态矩阵控制(DMC) 动态矩阵控制(Dynamic Matrix Control): 基于阶跃响应模型的预测控制 1973年,DMC应用于美国壳牌石油公司的生产 装臵上 1979年,Cutler等在美国化工学会年会上首次 介绍了DMC算法 主要内容 预测模型 反馈校正 参考轨迹 滚动优化 第四节 动态矩阵控制(DMC) 一. 预测模型 DMC的预测模型 渐近稳定线性被控对象的单位阶跃响应曲线 y 模型截断 a 有限个采样 N aN-1 周期后 N a a3 1 a2 0 t/T 1 2 3 N-1 N 系统的离散单位阶跃响应示意图 第四节 动态矩阵控制(DMC) 一. 预测模型 DMC算法中的模型参数 有限集合 aT={a1 2 ,a ,…,aN }中的参数可以完全 描述系统的动态特性 N称为建模时域 系统的渐近稳定性 保证了模型可用有限的阶跃响应描述 系统的线性 保证了可用线性系统的迭加性 第四节 动态矩阵控制(DMC) 一. 预测模型 7 7 6 4 1 Time 0 1 第四节 动态矩阵控制(DMC) 一. 预测模型 21 21 18 12 3 Time 0 3 第四节 动态矩阵控制(DMC) 一. 预测模型 6 4 7 7 7 7 4 1 -1 -2 -5 -7 -7 -8 -12 -14 -14 Time 0 1 -2
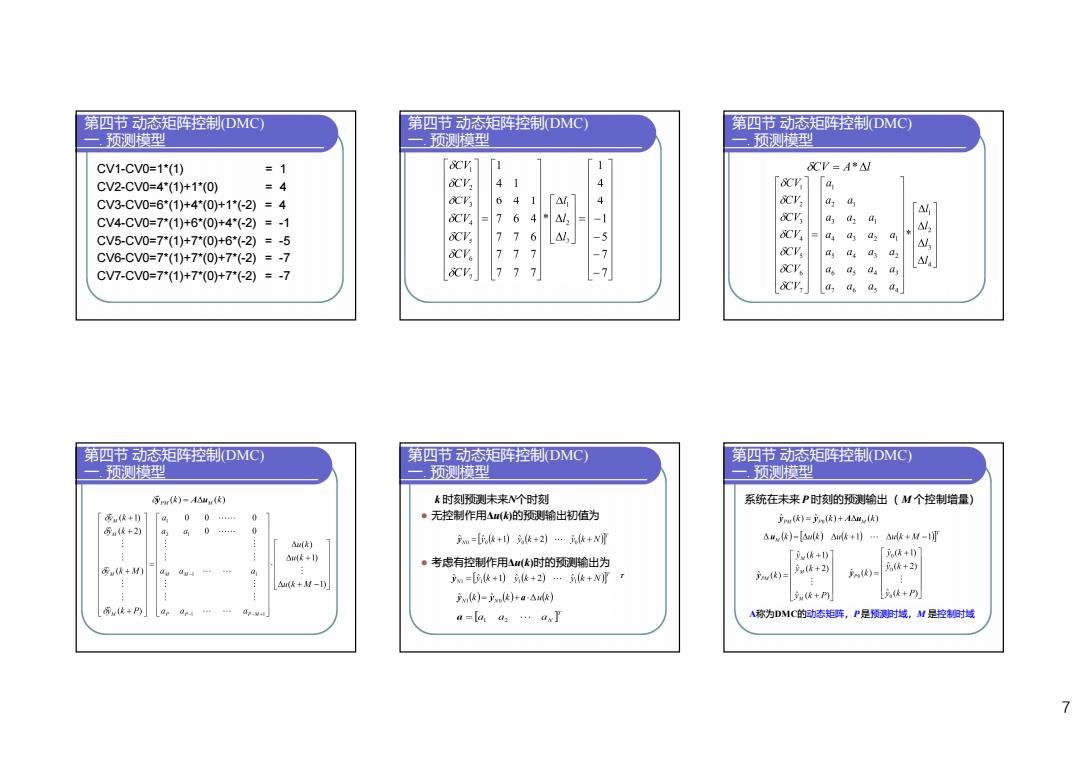
第四节动态矩阵控制DMC 第四节动态矩阵控制DMC 第四节动态矩阵控制DMC) 一预测模型 一预测模型 一预测测模型 CV1-CV0=1*(1) =1 1 CV=A*△W CV2-CV0=4(1)+1*(0) =4 1 4 8CV a CV3-CV0=6*(1)+4*(0)+1*(-2)=4 6 4 4 8CV; 4 a41 CV4-CV0=7*(1)+6*(0+4*(-2)=-1 1 6 4 -1 CV CV5-CV0=7*(1)+7*(0)+6*(-2)=-5 7 6 5 a CV6-CV0=7*(1)+7*(0+7*(-2)=-7 7 7 7 CV7-CV0=7产(1)+7*(0+7*(-2)=-7 8CV 7 -7 a a 第四节动态矩阵控制DMC 第四节动态矩阵控制DMC】 第四节动态矩阵控制(DMC 一预测模型 一预测测模型 一预测测模型 示r)=Au) k时刻预测未来N个时刻 系统在未来P时刻的预测翰出(M个控制增量) (k+) a 00 07 ·无控制作用Ak)的预测输出初值为 jru()=j )+AAmy ( ,(k+2) 40 0 Au(k) m=+)+2)…低+明 △w)-△w)△n+i)…Ak+M-l △nG+D 「(话+1) 「j话+) 。考虑有控制作用△(k)时的预测输出为 乎=[++2)…+N明1 w)=,话+2 k+2) w)= △(k+M-D jv()-jvo()+a-aidg) u低+ (P) w传+P -w a=【aa…awJ A称为DMC的动态矩车,P是预剥时域,M是控制归时域 7
7 第四节 动态矩阵控制(DMC) 一. 预测模型 CV1-CV0=1*(1) = 1 CV2-CV0=4*(1)+1*(0) = 4 CV3-CV0=6*(1)+4*(0)+1*(-2) = 4 CV4-CV0=7*(1)+6*(0)+4*(-2) = -1 CV5-CV0=7*(1)+7*(0)+6*(-2) = -5 CV6-CV0=7*(1)+7*(0)+7*(-2) = -7 CV7-CV0=7*(1)+7*(0)+7*(-2) = -7 第四节 动态矩阵控制(DMC) 一. 预测模型 第四节 动态矩阵控制(DMC) 一. 预测模型 第四节 动态矩阵控制(DMC) 一. 预测模型 第四节 动态矩阵控制(DMC) 一. 预测模型 k 时刻预测未来N个时刻 无控制作用Δu(k)的预测输出初值为 0 y ˆ ˆ N0 0 0 考虑有控制作用Δu(k)时的预测输出为 ˆ y k 1 y k 2 T y ˆ ˆ N1 1 1 y k y k a Δu k ˆ ˆ N1 N0 T 第四节 动态矩阵控制(DMC) 一. 预测模型 系统在未来 P 时刻的预测输出( M 个控制增量) ˆ ˆ y (k) y (k) A u (k) PM P0 M ΔuM k u k u k 1 yˆ (k 1) 0 M y yˆ (k 2) ˆ (k 2) 0 y yˆ (k) ˆ (k) M P0 PM A称为DMC的动态矩阵,P是预测时域,M 是控制时域