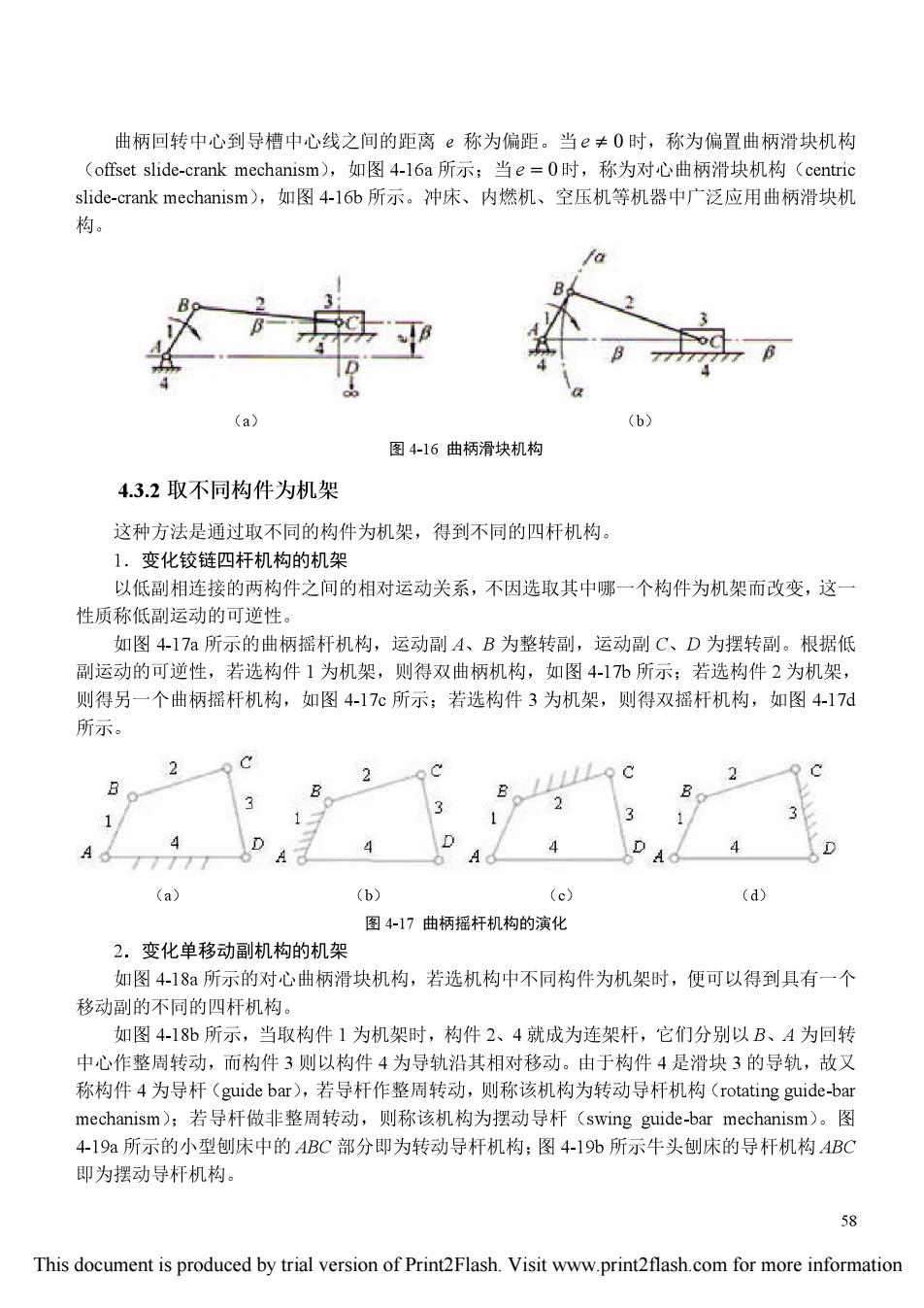
曲柄回转中心到导槽中心线之间的距离e称为偏距。当e≠0时,称为偏置曲柄滑块机构 (offset slide-crank mechanism),如图4-l6a所示;当e=0时,称为对心曲柄滑块机构(centric slide-crank mechanism),如图4-l6b所示。冲床、内燃机、空压机等机器中广泛应用曲柄滑块机 构。 (a) (b 图4-16曲柄滑块机构 4.3.2取不同构件为机架 这种方法是通过取不同的构件为机架,得到不同的四杆机构。 1.变化铰链四杆机构的机架 以低副相连接的两构件之间的相对运动关系,不因选取其中哪一个构件为机架而改变,这一 性质称低副运动的可逆性。 如图4-17a所示的曲柄摇杆机构,运动副A、B为整转副,运动副C、D为摆转副。根据低 副运动的可逆性,若选构件1为机架,则得双曲柄机构,如图417b所示;若选构件2为机架, 则得另一个曲柄摇杆机构,如图4-17c所示:若选构件3为机架,则得双摇杆机构,如图4-17d 所示。 B 0 B B 1 4 A (a) (b) (c) (d) 图4-17曲柄摇杆机构的演化 2.变化单移动副机构的机架 如图4-18a所示的对心曲柄滑块机构,若选机构中不同构件为机架时,便可以得到具有一个 移动副的不同的四杆机构。 如图4-18b所示,当取构件1为机架时,构件2、4就成为连架杆,它们分别以B、A为回转 中心作整周转动,而构件3则以构件4为导轨沿其相对移动。由于构件4是滑块3的导轨,故又 称构件4为导杆(guide bar),若导杆作整周转动,则称该机构为转动导杆机构(rotating guide-.bar mechanism);若导杆做非整周转动,则称该机构为摆动导杆(swing guide-bar mechanism)。图 4-19a所示的小型刨床中的ABC部分即为转动导杆机构;图4-19b所示牛头刨床的导杆机构ABC 即为摆动导杆机构。 58 This document is produced by trial version of Print2Flash.Visit www.print2flash.com for more information
This document is produced by trial version of Print2Flash. Visit www.print2flash.com for more information
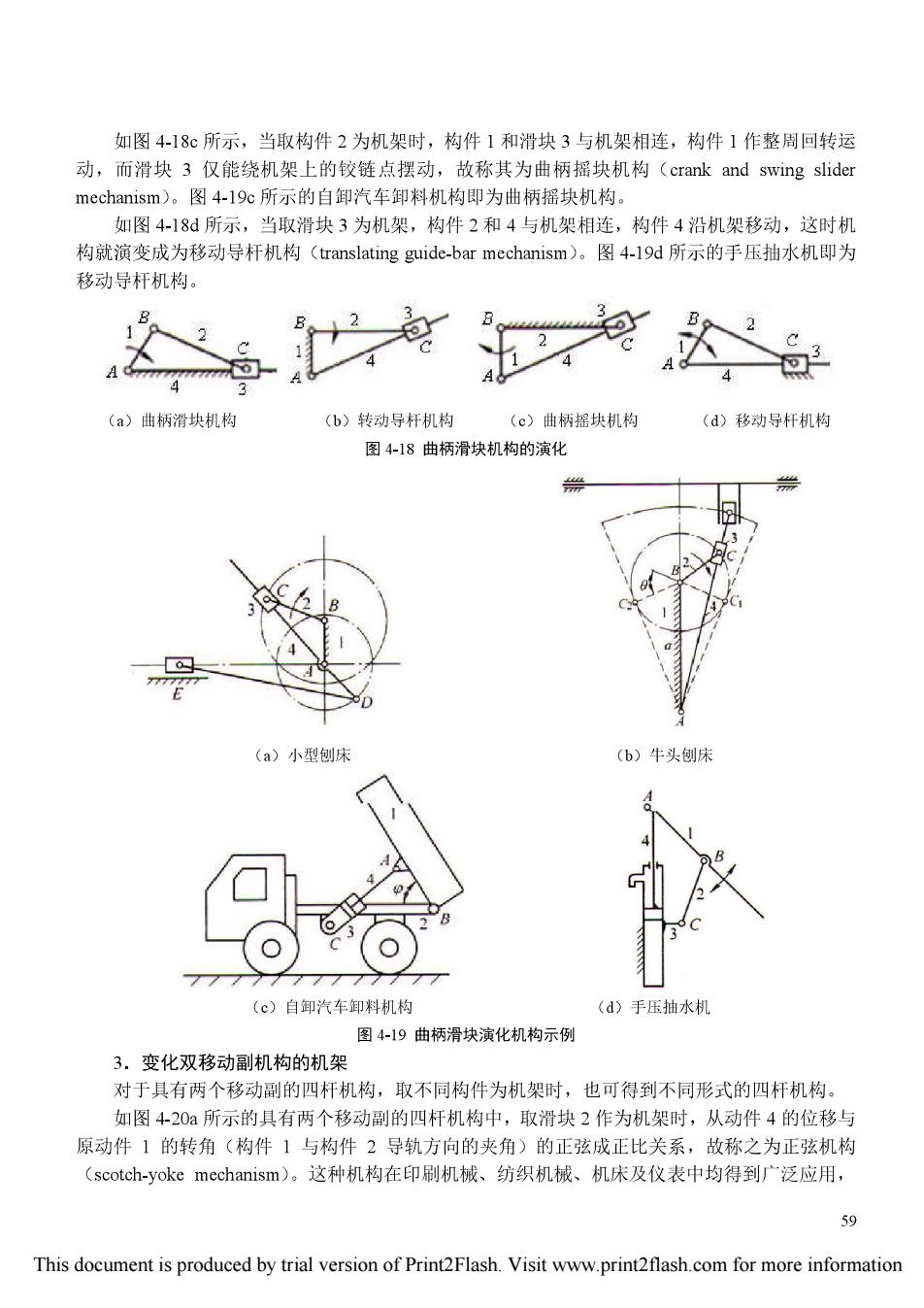
如图4-18c所示,当取构件2为机架时,构件1和滑块3与机架相连,构件1作整周回转运 动,而滑块3仅能绕机架上的铰链点摆动,故称其为曲柄摇块机构(crank and swing slider mechanism)。图4-19c所示的自卸汽车卸料机构即为曲柄摇块机构。 如图4-18d所示,当取滑块3为机架,构件2和4与机架相连,构件4沿机架移动,这时机 构就演变成为移动导杆机构(translating guide-bar mechanism)。图4-l9d所示的手压抽水机即为 移动导杆机构。 (a)曲柄滑块机构 (b)转动导杆机构 (c)曲柄摇块机构 (d)移动导杆机构 图4-18曲柄滑块机构的演化 (a)小型刨床 (b)牛头刨床 (c)自卸汽车卸料机构 (d)手压抽水机 图4-19曲柄滑块演化机构示例 3.变化双移动副机构的机架 对于具有两个移动副的四杆机构,取不同构件为机架时,也可得到不同形式的四杆机构。 如图420a所示的具有两个移动副的四杆机构中,取滑块2作为机架时,从动件4的位移与 原动件1的转角(构件1与构件2导轨方向的夹角)的正弦成正比关系,故称之为正弦机构 (scotch-yoke mechanism)。这种机构在印刷机械、纺织机械、机床及仪表中均得到广泛应用, 59 This document is produced by trial version of Print2Flash.Visit www.print2flash.com for more information
This document is produced by trial version of Print2Flash. Visit www.print2flash.com for more information
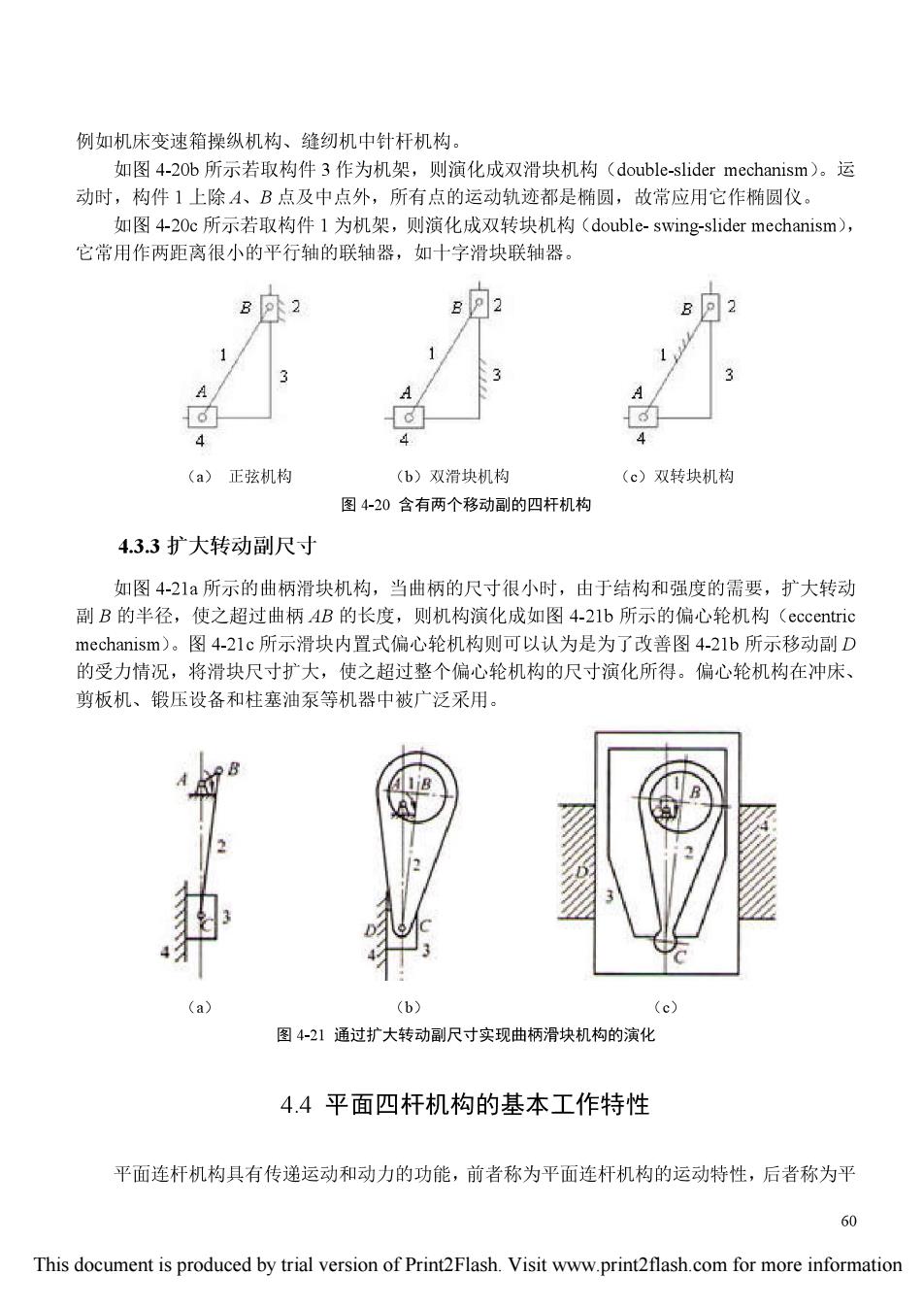
例如机床变速箱操纵机构、缝纫机中针杆机构。 如图4-20b所示若取构件3作为机架,则演化成双滑块机构(double-.slider mechanism)。运 动时,构件1上除A、B点及中点外,所有点的运动轨迹都是椭圆,故常应用它作椭圆仪。 如图420c所示若取构件1为机架,则演化成双转块机构(double--swing-slider mechanism), 它常用作两距离很小的平行轴的联轴器,如十字滑块联轴器。 B p2 B 2 3 4 4 (a)正弦机构 (b)双滑块机构 (c)双转块机构 图4-20含有两个移动副的四杆机构 4.3.3扩大转动副尺寸 如图4-21所示的曲柄滑块机构,当曲柄的尺寸很小时,由于结构和强度的需要,扩大转动 副B的半径,使之超过曲柄AB的长度,则机构演化成如图4-21b所示的偏心轮机构(eccentric mechanism)。图4-21c所示滑块内置式偏心轮机构则可以认为是为了改善图4-21b所示移动副D 的受力情况,将滑块尺寸扩大,使之超过整个偏心轮机构的尺寸演化所得。偏心轮机构在冲床、 剪板机、锻压设备和柱塞油泵等机器中被广泛采用。 (a (b) (c) 图4-21通过扩大转动副尺寸实现曲柄滑块机构的演化 4.4平面四杆机构的基本工作特性 平面连杆机构具有传递运动和动力的功能,前者称为平面连杆机构的运动特性,后者称为平 60 This document is produced by trial version of Print2Flash.Visit www.print2flash.com for more information
This document is produced by trial version of Print2Flash. Visit www.print2flash.com for more information