第十章机械系统动力学基础 内容提要 本章主要研究在外力作用下机械的真实运动规律。主要介绍作用在机械上的驱动力和生产阻 力,研究等效动力学模型的建立和机械运动方程的建立及其求解。最后介绍机械运转速度的波动 及其调节方法。 10.1概述 10.1.1研究的内容和目的 前面我们从运动学角度研究机构时,认为机构的运动仅与机构中各构件的尺寸有关,并且总 假设原动件作匀速运动。实际上,机械在运转时,构件的分布质量和尺寸、运动副的间隙、回转 构件的不平衡、作用在机械系统上的驱动力和生产阻力的变化等都会引起机械的速度波动,影响 机械的运转精度和动态性能。这些问题都属于机械动力学的研究范畴。而现代机械对高精度、高 性能、低振动、低噪声等要求越来越高,有关机械动力学的问题也日益突出。 本章将从动力学角度,对单自由度机械系统的原动机运动规律及机械系统的真实运动规律进 行分析研究,便于更准确的对机械系统进行运动分析和受力分析,这对新机器的设计,尤其是高 速、重载、高精度的机械具有重要意义。 另外,机械运动过程中出现的速度波动,将会导致运动副中产生附加动载荷,引起机械的振 动,从而会降低机械的寿命、效率和工作质量。所以,研究机械的运转速度波动及调节方法,使 机械的转速在允许范围内波动,而保证正常工作。 10.1.2作用在机械上的外力 为了研究机械在外力作用下的真实运动规律,首先需要确定作用在机械上的外力。忽略各构 件的重力、惯性力及各运动副间摩擦力的影响,一般情况下作用在机械上的外力包括驱动力和工 作阻力。 1.驱动力 凡是驱使机械产生运动的力称为驱动力(driving force),其特征是力与其作用点的速度方向 相同或成锐角,所做的功为正功(positive work),称为输入功(driving work),用Wa表示。 驱动力一般由原动机提供,其变化规律取决于原动机的机械特性。通常将力(或力矩)与运 212 This document is produced by trial version of Print2Flash.Visit www.print2flash.com for more information
This document is produced by trial version of Print2Flash. Visit www.print2flash.com for more information
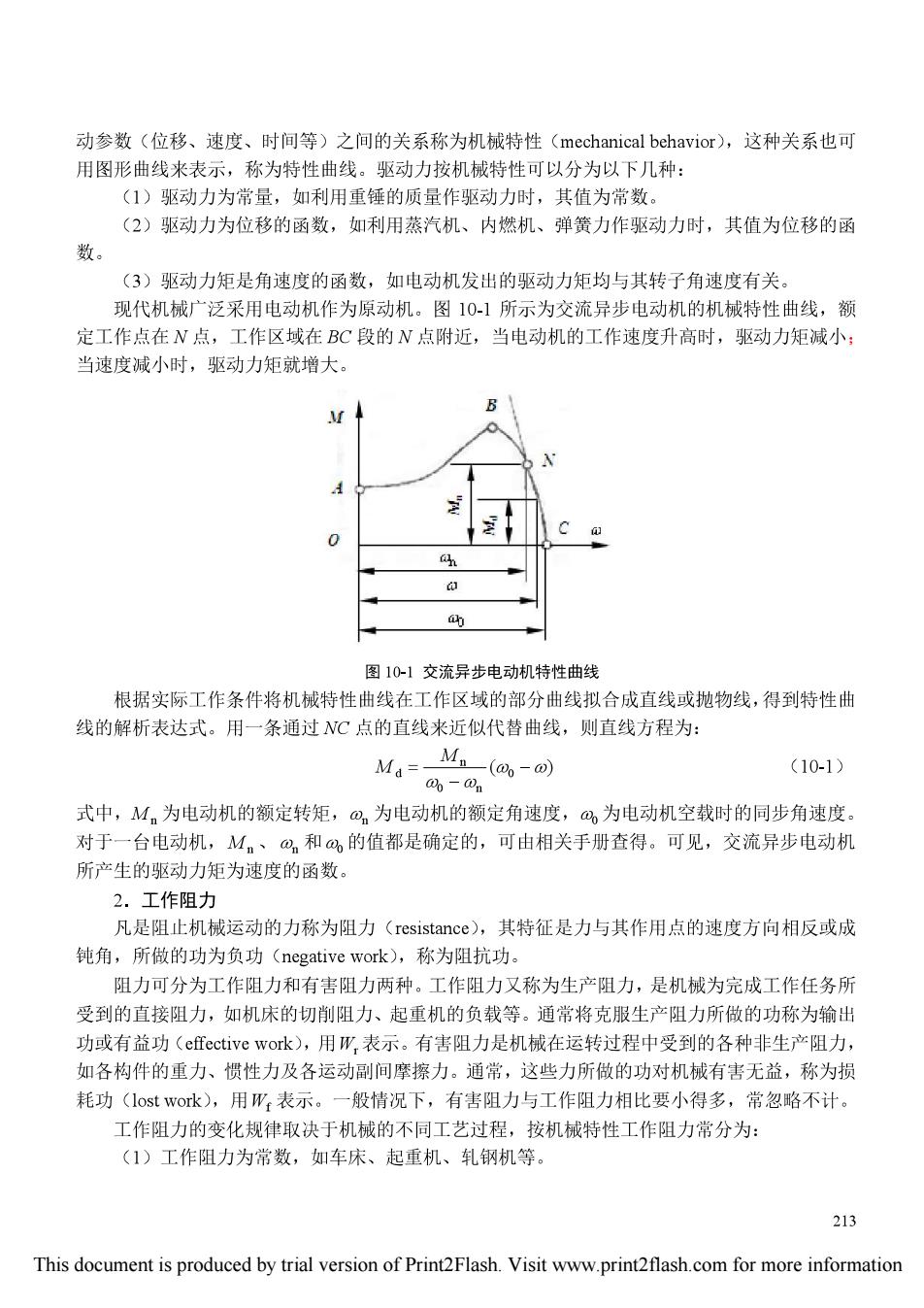
动参数(位移、速度、时间等)之间的关系称为机械特性(mechanical behavior),这种关系也可 用图形曲线来表示,称为特性曲线。驱动力按机械特性可以分为以下几种: (1)驱动力为常量,如利用重锤的质量作驱动力时,其值为常数。 (2)驱动力为位移的函数,如利用蒸汽机、内燃机、弹簧力作驱动力时,其值为位移的函 数。 (3)驱动力矩是角速度的函数,如电动机发出的驱动力矩均与其转子角速度有关。 现代机械广泛采用电动机作为原动机。图10-1所示为交流异步电动机的机械特性曲线,额 定工作点在N点,工作区域在BC段的N点附近,当电动机的工作速度升高时,驱动力矩减小: 当速度减小时,驱动力矩就增大。 B 4 的 h 图10-1交流异步电动机特性曲线 根据实际工作条件将机械特性曲线在工作区域的部分曲线拟合成直线或抛物线,得到特性曲 线的解析表达式。用一条通过C点的直线来近似代替曲线,则直线方程为: Md=-Mn(@o-0) (10-1) -0n 式中,M,为电动机的额定转矩,o.为电动机的额定角速度,®,为电动机空载时的同步角速度。 对于一台电动机,M,、⊙,和@,的值都是确定的,可由相关手册查得。可见,交流异步电动机 所产生的驱动力矩为速度的函数。 2.工作阻力 凡是阻止机械运动的力称为阻力(resistance),其特征是力与其作用点的速度方向相反或成 钝角,所做的功为负功(negative work),称为阻抗功。 阻力可分为工作阻力和有害阻力两种。工作阻力又称为生产阻力,是机械为完成工作任务所 受到的直接阻力,如机床的切削阻力、起重机的负载等。通常将克服生产阻力所做的功称为输出 功或有益功(effective work),用W,表示。有害阻力是机械在运转过程中受到的各种非生产阻力, 如各构件的重力、惯性力及各运动副间摩擦力。通常,这些力所做的功对机械有害无益,称为损 耗功(lost work),用W表示。一般情况下,有害阻力与工作阻力相比要小得多,常忽略不计。 工作阻力的变化规律取决于机械的不同工艺过程,按机械特性工作阻力常分为: (1)工作阻力为常数,如车床、起重机、轧钢机等。 213 This document is produced by trial version of Print2Flash.Visit www.print2flash.com for more information
This document is produced by trial version of Print2Flash. Visit www.print2flash.com for more information
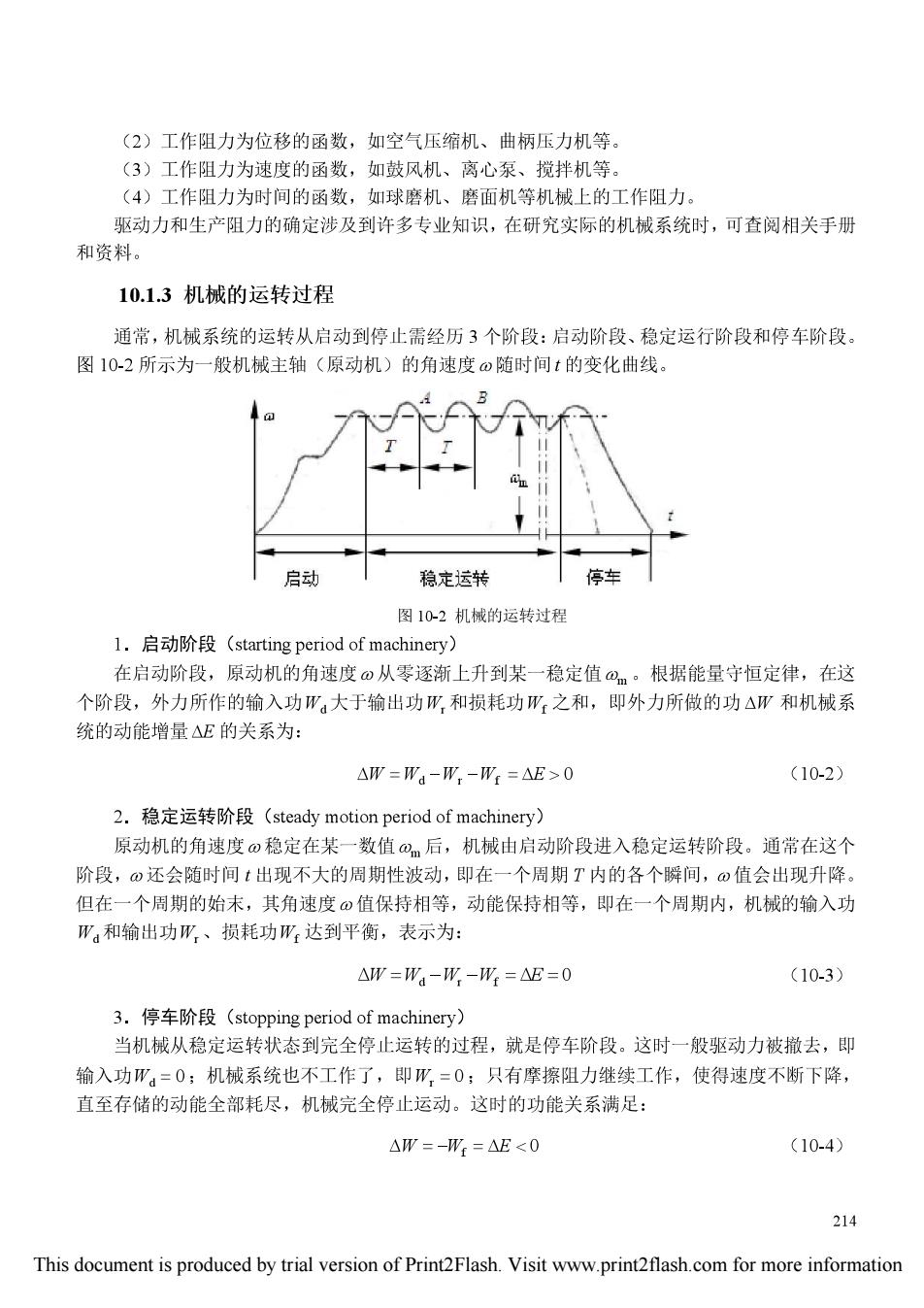
(2)工作阻力为位移的函数,如空气压缩机、曲柄压力机等。 (3)工作阻力为速度的函数,如鼓风机、离心泵、搅拌机等。 (4)工作阻力为时间的函数,如球磨机、磨面机等机械上的工作阻力。 驱动力和生产阻力的确定涉及到许多专业知识,在研究实际的机械系统时,可查阅相关手册 和资料。 10.1.3机械的运转过程 通常,机械系统的运转从启动到停止需经历3个阶段:启动阶段、稳定运行阶段和停车阶段。 图10-2所示为一般机械主轴(原动机)的角速度o随时间t的变化曲线。 启动 稳定运转 停车 图10-2机械的运转过程 l.启动阶段(starting period of machinery) 在启动阶段,原动机的角速度®从零逐渐上升到某一稳定值①。根据能量守恒定律,在这 个阶段,外力所作的输入功W,大于输出功W,和损耗功W之和,即外力所做的功△W和机械系 统的动能增量△E的关系为: △W=W:-W,-W=△E>0 (10-2) 2.稳定运转阶段(steady motion period of machinery) 原动机的角速度o稳定在某一数值①m后,机械由启动阶段进入稳定运转阶段。通常在这个 阶段,o还会随时间t出现不大的周期性波动,即在一个周期T内的各个瞬间,o值会出现升降。 但在一个周期的始末,其角速度⊙值保持相等,动能保持相等,即在一个周期内,机械的输入功 W,和输出功W、损耗功W达到平衡,表示为: △W=W:-W-W=△E=0 (10-3) 3.停车阶段(stopping period of machinery) 当机械从稳定运转状态到完全停止运转的过程,就是停车阶段。这时一般驱动力被撤去,即 输入功W=0;机械系统也不工作了,即W=0;只有摩擦阻力继续工作,使得速度不断下降, 直至存储的动能全部耗尽,机械完全停止运动。这时的功能关系满足: △W=-W=△E<0 (10-4) 214 This document is produced by trial version of Print2Flash.Visit www.print2flash.com for more information
This document is produced by trial version of Print2Flash. Visit www.print2flash.com for more information
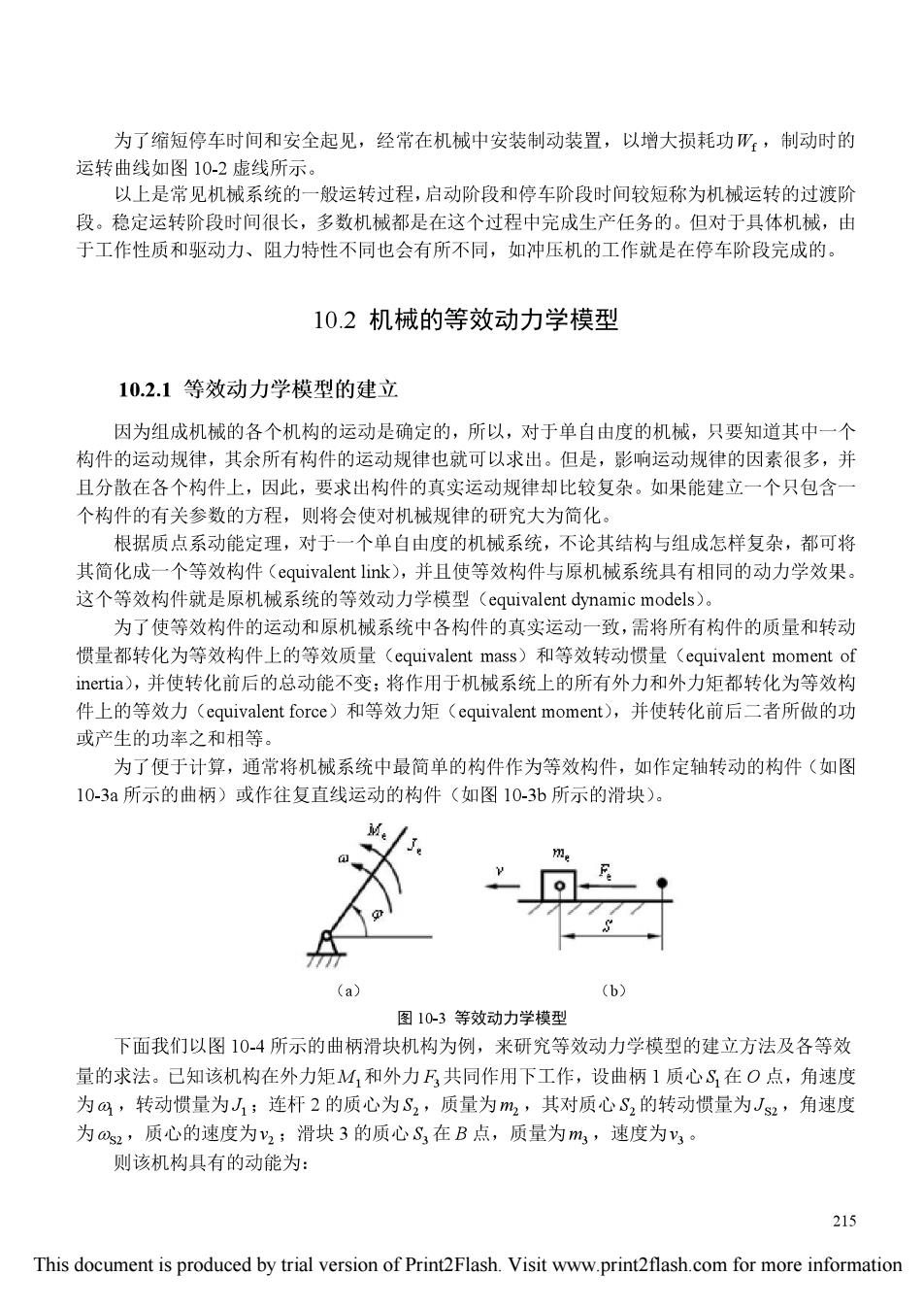
为了缩短停车时间和安全起见,经常在机械中安装制动装置,以增大损耗功W。,制动时的 运转曲线如图10-2虚线所示。 以上是常见机械系统的一般运转过程,启动阶段和停车阶段时间较短称为机械运转的过渡阶 段。稳定运转阶段时间很长,多数机械都是在这个过程中完成生产任务的。但对于具体机械,由 于工作性质和驱动力、阻力特性不同也会有所不同,如冲压机的工作就是在停车阶段完成的。 10.2机械的等效动力学模型 10.2.1等效动力学模型的建立 因为组成机械的各个机构的运动是确定的,所以,对于单自由度的机械,只要知道其中一个 构件的运动规律,其余所有构件的运动规律也就可以求出。但是,影响运动规律的因素很多,并 且分散在各个构件上,因此,要求出构件的真实运动规律却比较复杂。如果能建立一个只包含一 个构件的有关参数的方程,则将会使对机械规律的研究大为简化。 根据质点系动能定理,对于一个单自由度的机械系统,不论其结构与组成怎样复杂,都可将 其简化成一个等效构件(equivalent link),并且使等效构件与原机械系统具有相同的动力学效果。 这个等效构件就是原机械系统的等效动力学模型(equivalent dynamic models)。 为了使等效构件的运动和原机械系统中各构件的真实运动一致,需将所有构件的质量和转动 惯量都转化为等效构件上的等效质量(equivalent mass)和等效转动惯量(equivalent moment of inertia),并使转化前后的总动能不变;将作用于机械系统上的所有外力和外力矩都转化为等效构 件上的等效力(equivalent force)和等效力矩(equivalent moment),并使转化前后二者所做的功 或产生的功率之和相等。 为了便于计算,通常将机械系统中最简单的构件作为等效构件,如作定轴转动的构件(如图 10-3a所示的曲柄)或作往复直线运动的构件(如图10-3b所示的滑块)。 (a) (b) 图10-3等效动力学模型 下面我们以图10-4所示的曲柄滑块机构为例,来研究等效动力学模型的建立方法及各等效 量的求法。已知该机构在外力矩M,和外力F,共同作用下工作,设曲柄1质心S,在O点,角速度 为@,转动惯量为J1;连杆2的质心为S2,质量为m2,其对质心S2的转动惯量为Js2,角速度 为2,质心的速度为2;滑块3的质心S,在B点,质量为m3,速度为y3。 则该机构具有的动能为: 215 This document is produced by trial version of Print2Flash.Visit www.print2flash.com for more information
This document is produced by trial version of Print2Flash. Visit www.print2flash.com for more information
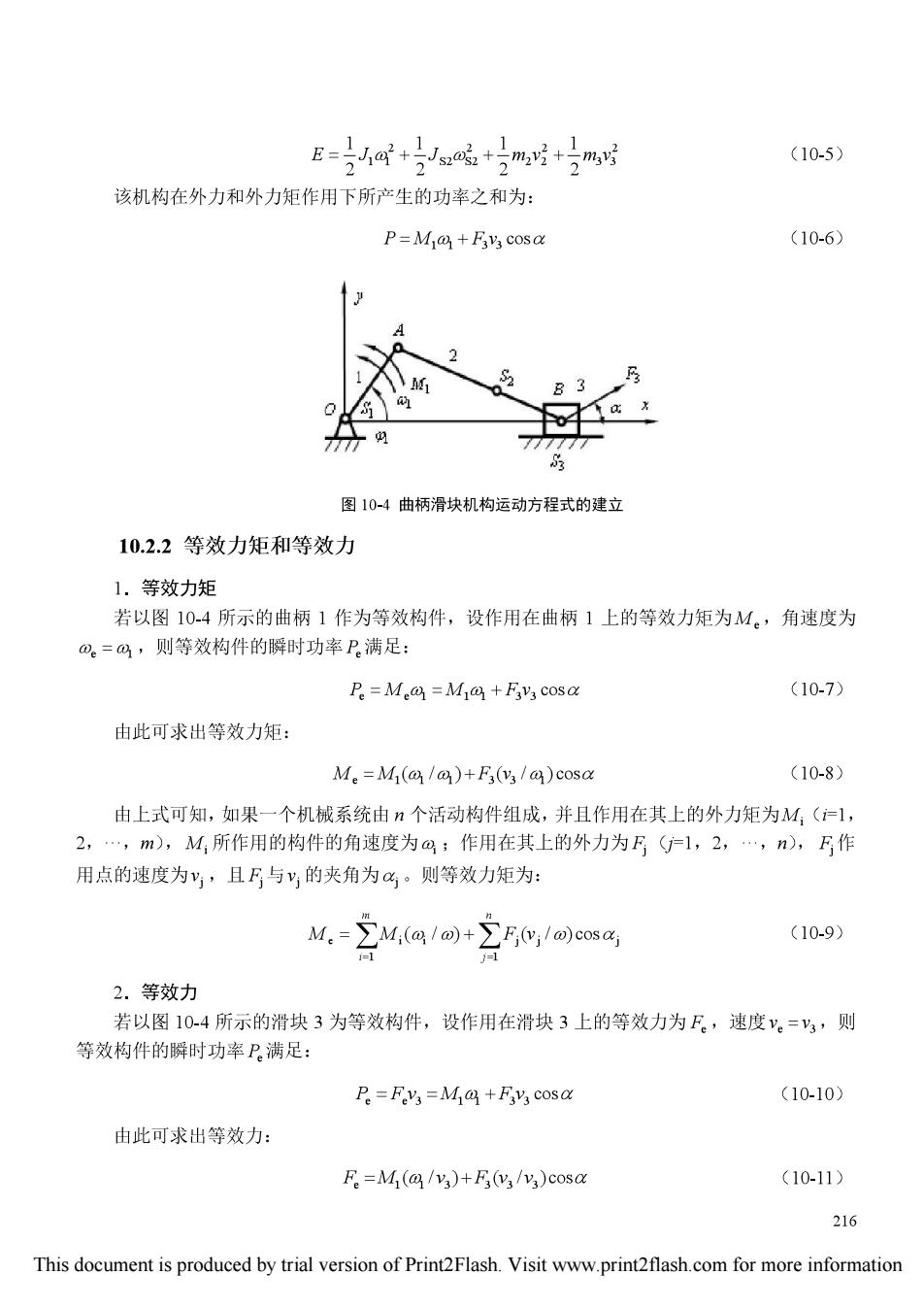
E=+a+%+ (10-5) 该机构在外力和外力矩作用下所产生的功率之和为: P=M a+F3v3 cosa (10-6) a x 777777 图10-4曲柄滑块机构运动方程式的建立 10.2.2等效力矩和等效力 1.等效力矩 若以图10-4所示的曲柄1作为等效构件,设作用在曲柄1上的等效力矩为M。,角速度为 @。=,则等效构件的瞬时功率P满足: P。=Me=M1+F3y3cos (10-7) 由此可求出等效力矩: Me=M(a/a)+F3(v3/a)cosa (10-8) 由上式可知,如果一个机械系统由n个活动构件组成,并且作用在其上的外力矩为M(1, 2,…,m),M所作用的构件的角速度为@;作用在其上的外力为F(1,2,,n),F作 用点的速度为y,且F与y,的夹角为必。则等效力矩为: M.=∑M,(a1o)+∑ j(vj/@)cosaj (10-9) 2.等效力 若以图10-4所示的滑块3为等效构件,设作用在滑块3上的等效力为F。,速度y。=3,则 等效构件的瞬时功率P满足: Pe =Fev,=Ma+F3v3 cosa (10-10) 由此可求出等效力: F=M1(/3)+F(y3/3)cosa (10-11) 216 This document is produced by trial version of Print2Flash.Visit www.print2flash.com for more information
This document is produced by trial version of Print2Flash. Visit www.print2flash.com for more information