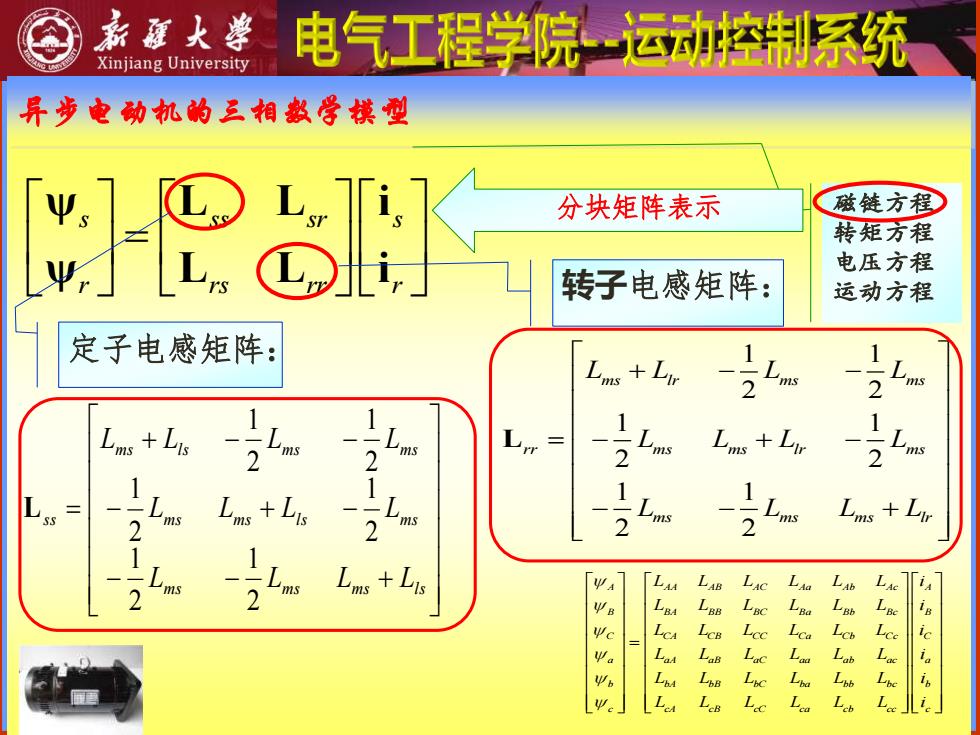
亲原火学 电气工程学院运动控制系统 Xinjiang University 异步电动机的三相数学模型 分块矩阵表示 磁链方程) 转矩方程 电压方程 转子电感矩阵: 运动方程 定子电感矩阵: 1 2 2 2 L= s 2 Lms Lir 2 1 2 s 2 2 2 Lms Li 1 LAA LAB LAC 2 2 LBA LBC LBb LCB Lca LCb Lab
异步电动机的三相数学模型 s s ss sr r r rs rr = ψ L L i ψ L L i A AA AB AC Aa Ab Ac A B BA BB BC Ba Bb Bc B C CA CB CC Ca Cb Cc C a aA aB aC aa ab ac a b bA bB bC ba bb bc b c cA cB cC ca cb cc c L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i = 定子电感矩阵: 转子电感矩阵: − − + − + − + − − = m s m s m s l s m s m s l s m s m s l s m s m s s s L L L L L L L L L L L L 2 1 2 1 2 1 2 1 2 1 2 1 L 1 1 2 2 1 1 2 2 1 1 2 2 ms lr ms ms rr ms ms lr ms ms ms ms lr L L L L L L L L L L L L + − − = − + − − − + L 磁链方程 转矩方程 电压方程 运动方程 分块矩阵表示
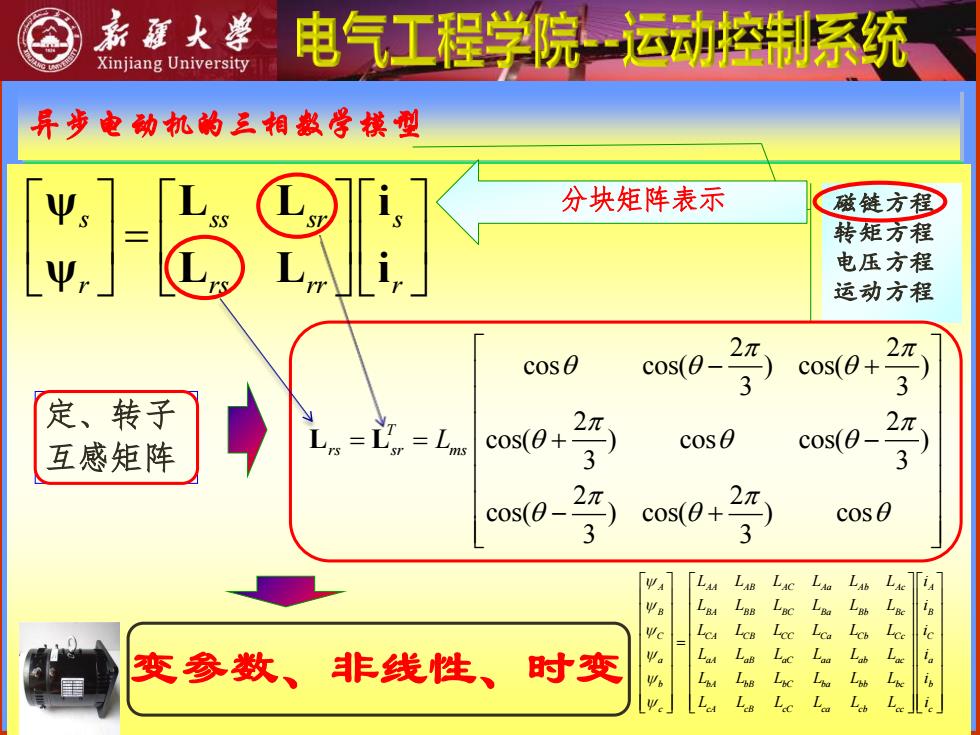
电气工程学院一运动控制系统 Xinjiang University 异步电动机的三相款学模型 分块矩阵表示 磁链方程 转矩方程 Ψ 电压方程 运动方程 cos 0 cos(0- cos(0+ 3 定、转子 c0s0+2】 2π 互感矩阵 cos 0 cos(0- cos(0-. eo0+2号 cos 0 L LAB LAb 变参数、非线性、 时变 e Le 小
异步电动机的三相数学模型 磁链方程 转矩方程 电压方程 运动方程 s s ss sr r r rs rr = ψ L L i ψ L L i 分块矩阵表示 A AA AB AC Aa Ab Ac A B BA BB BC Ba Bb Bc B C CA CB CC Ca Cb Cc C a aA aB aC aa ab ac a b bA bB bC ba bb bc b c cA cB cC ca cb cc c L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i = 2 2 cos cos( ) cos( ) 3 3 2 2 cos( ) cos cos( ) 3 3 2 2 cos( ) cos( ) cos 3 3 T rs sr ms L − + = = + − − + L L 变参数、非线性、时变 定、转子 互感矩阵
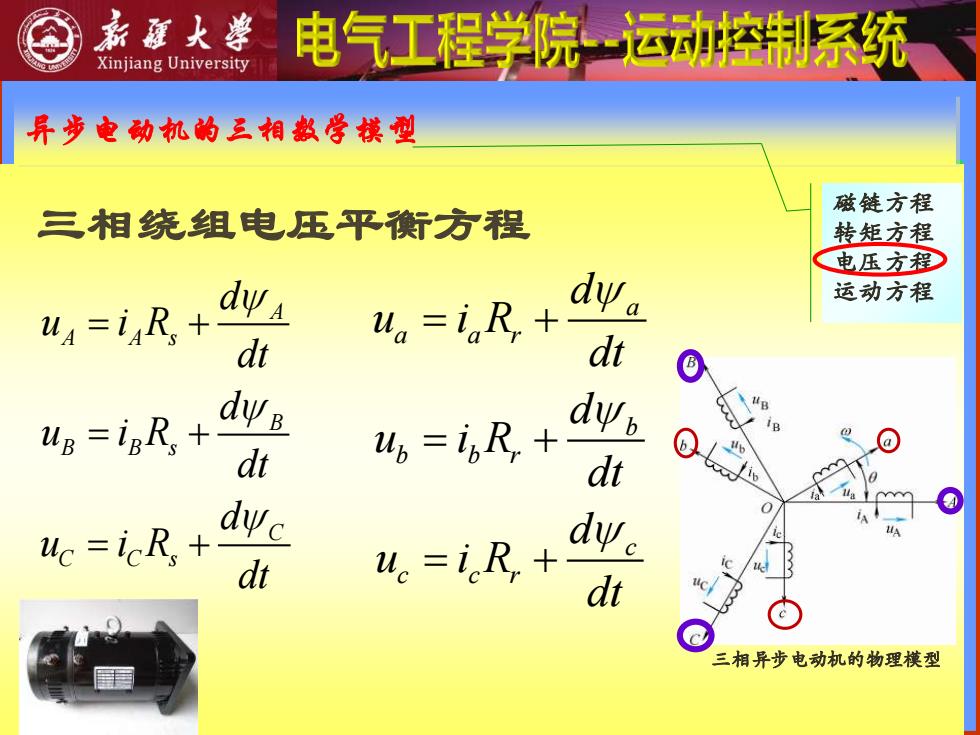
系庭大学 电气工程学院运动控制系统 Xinjiang University 异步电动机的三相款学模型 磁链方程 三相绕组电压平衡衔方程 转矩方程 电压方程) dw a dya 运动方程 u4=i4R,+ di ug igR, dt dwB dΨb dt u6=6R+ dt uc icRs+ dyc u。=i。R+ dΨe dt 三相异步电动机的物理模型
异步电动机的三相数学模型 磁链方程 转矩方程 电压方程 运动方程 三相绕组电压平衡方程 A A A s B B B s C C C s d u i R dt d u i R dt d u i R dt = + = + = + a a a r b b b r c c c r d u i R dt d u i R dt d u i R dt = + = + = + 三相异步电动机的物理模型
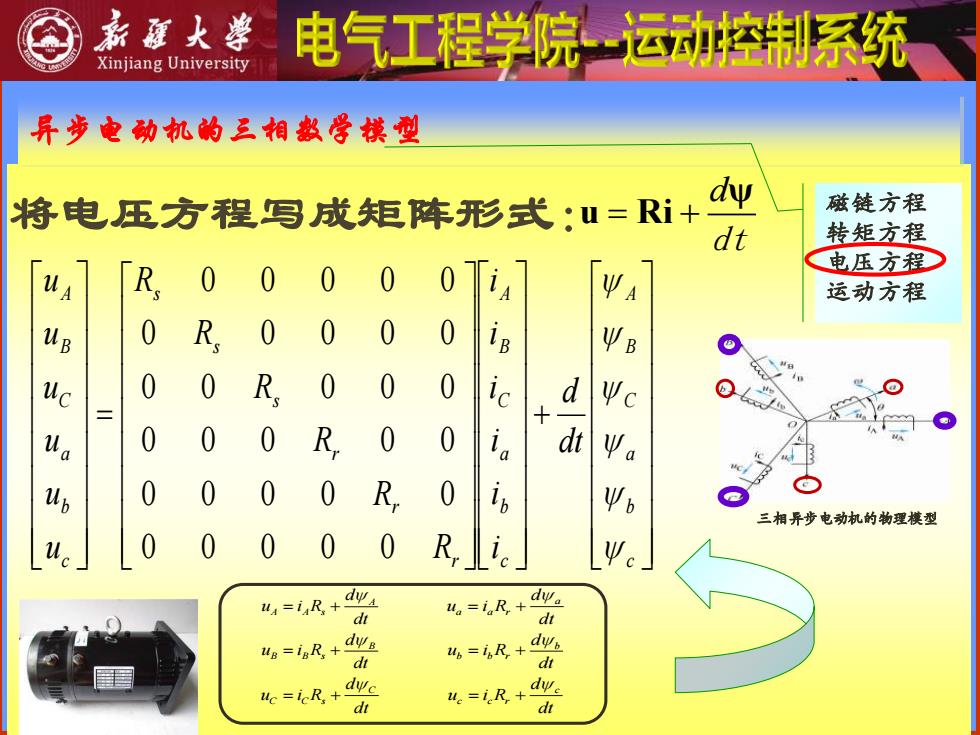
新庭火学 电气工程学院运动控制系统 Xinjiang University 异步电动机的三相数骨模型 将电压方程写成矩阵形式:u=R+ dy 磁链方程 dt 转矩方程 电压方程 R ΨA 运动方程 UB 0 R 0 0 B ΨB uc 0 0 R 0 0 0 d c 0 0 0 R 0 0 dt u, 0 0 0 0 R 0 6 三相异步电动机的物理模型 0 0 0 0 0 R u=ik+d 4。=iR,+ dt dt s=aR+d业e dt 么=R+业 ue =icR,duc dt 4=。R+ d
异步电动机的三相数学模型 磁链方程 转矩方程 电压方程 运动方程 将电压方程写成矩阵形式: 三相异步电动机的物理模型 d = + ψ u Ri dt + = c b a C B A c b a C B A r r r s s s c b a C B A dt d i i i i i i R R R R R R u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 A A A s B B B s C C C s d u i R dt d u i R dt d u i R dt = + = + = + a a a r b b b r c c c r d u i R dt d u i R dt d u i R dt = + = + = +
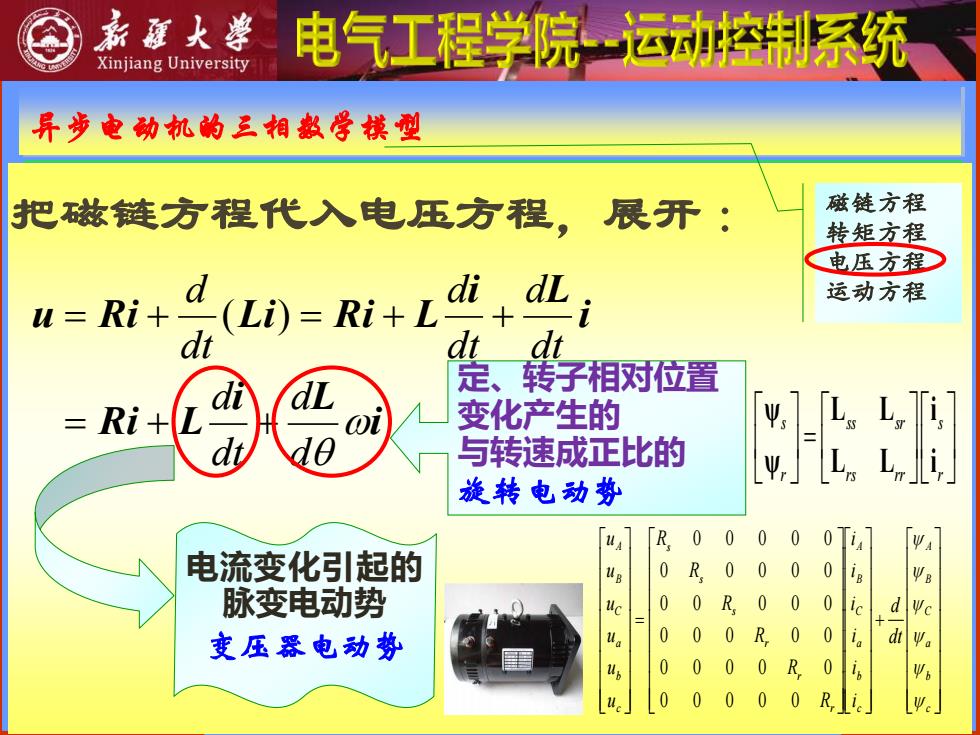
系庭大学 电气工程学院运动控制系统 Xinjiang University 异步电动机的三相数学模型 把磁链方程代入电压方程。展开: 磁链方程 转矩方程 《电压方程) u=Ri+ (Li)=Ri+L di dL 运动方程 dt dt dt 定、转子相对位置 Ri+ 变化产生的 与转速成正比的 旋转电动势 0 0 00 电流变化引起的 0 R 0 0 0 0 脉变电动势 0 0 0 0 0 ic 变压器电动势 0 0 0 R 0 d-山 0 0 0 R 0 0 0 0 R
异步电动机的三相数学模型 磁链方程 转矩方程 电压方程 运动方程 把磁链方程代入电压方程,展开 : i i L Ri L i i L u Ri Li Ri L d d dt d dt d dt d dt d = + + = + ( ) = + + 电流变化引起的 脉变电动势 变压器电动势 定、转子相对位置 变化产生的 与转速成正比的 旋转电动势 s s ss sr r r rs rr = ψ L L i ψ L L i + = c b a C B A c b a C B A r r r s s s c b a C B A dt d i i i i i i R R R R R R u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0