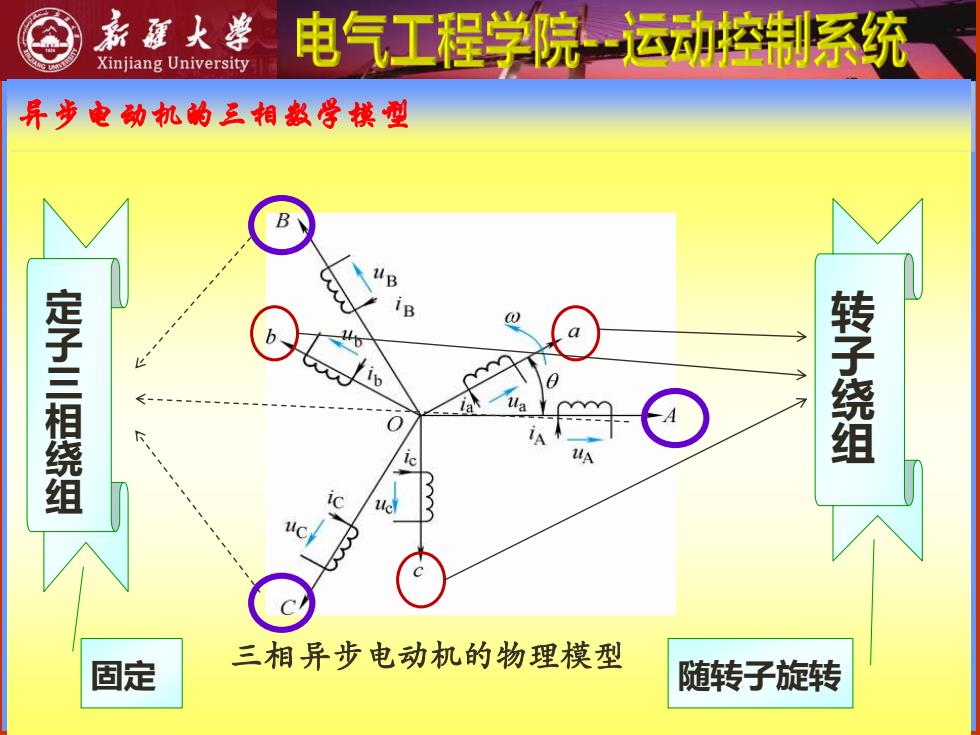
亲藤火学 电气工程学院运动控制系统 Xinjiang University 异步电动机的三相感学模型 定子三相绕组 转子绕组 固定 三相异步电动机的物理模型 随转子旋转
异步电动机的三相数学模型 三相异步电动机的物理模型 定 子 三 相 绕 组 固定 转 子 绕 组 随转子旋转
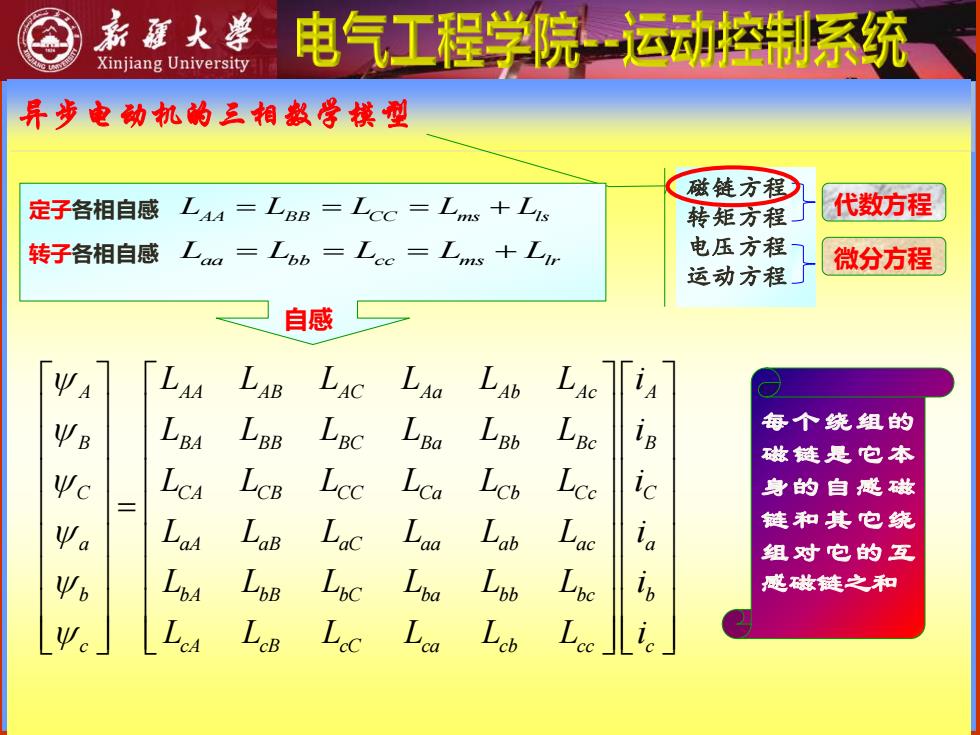
亲莲火学 Xinjiang University 电气工程学院运动控制系统 异步电动机的三相数骨模型 磁链方程 定子各相自感LA4=LBB=LCC=Lms+Ls 转矩方程 代数方程 转子各相自感Laa=Lbb=Lcc=Lms+Lr 电压方程 运动方程」 微分方程 自感 LAB LAC LAb ΨB LBA LBB LBc LBa Lsb Lge 每个绕组的 磁链是它本 Vc LCA LCB Lec LCb ic 身的自感磁 B 链和其它绕 组对它的互 LoA Loe Lob 感磁链之和 LeB Lec Lca b
异步电动机的三相数学模型 磁链方程 转矩方程 电压方程 运动方程 代数方程 微分方程 A AA AB AC Aa Ab Ac A B BA BB BC Ba Bb Bc B C CA CB CC Ca Cb Cc C a aA aB aC aa ab ac a b bA bB bC ba bb bc b c cA cB cC ca cb cc c L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i = 每个绕组的 磁链是它本 身的自感磁 链和其它绕 组对它的互 感磁链之和 定子各相自感 转子各相自感 L L L L L AA BB CC ms ls = = = + L L L L L aa bb cc ms lr = = = + 自感

亲藤火学 电气工程学院运动控制系统 Xinjiang University 异步电动机的三相数骨模型 2元 三相绕组轴线彼此在空间的相位差:± 3 磁链方程 互感:Lcos2 π 3 定子三相间或 转矩方程 电压方程 运动方程 定子三相间或转子三相间互感: 转子三相间互感 LAB LBC LCA=LBA LCB LAC = 2 定子和转子 2 三相彼此之间 ΨA LAB LAC LAa LAb 位置都固定 互感为常值 LaB Lea in We Lea LCB Lcc Lce Lcb ic LaB Lac Lab 。 LpB Lpb LeB Lec Loa 女G
异步电动机的三相数学模型 A AA AB AC Aa Ab Ac A B BA BB BC Ba Bb Bc B C CA CB CC Ca Cb Cc C a aA aB aC aa ab ac a b bA bB bC ba bb bc b c cA cB cC ca cb cc c L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i = 磁链方程 转矩方程 电压方程 运动方程 互 感 定子和转子 三相彼此之间 位置都固定 互感为常值 定子与转子 任一相间的相 对位置是变化 互感是 角位移的函数 三相绕组轴线彼此在空间的相位差: 2 3 定 子 三 相 间 或 转 子 三 相 间 互 感 2 2 1 cos cos( ) 3 3 2 L L L ms ms ms 互感: = − = − 1 2 1 2 AB BC CA BA CB AC ms ab bc ca ba cb ac ms L L L L L L L L L L L L L L = = = = = = − = = = = = = − 定子三相间或转子三相间互感:
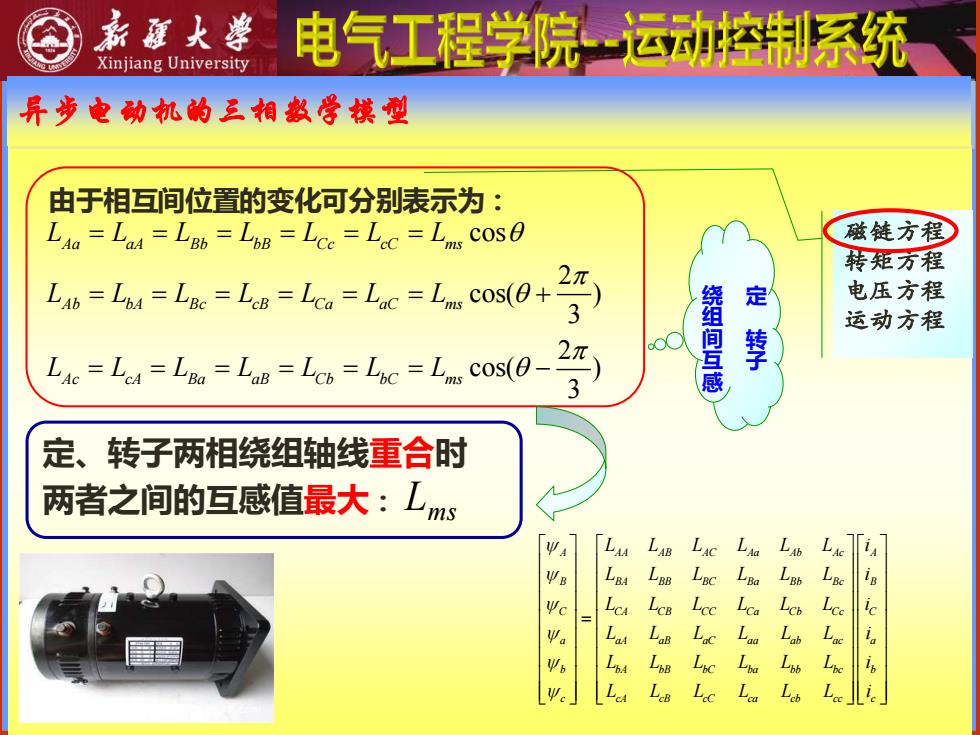
亲莲火学 电气工程学院运动控制系统 Xinjiang University 异步电动机的三相数学模型 由于相互间位置的变化可分别表示为: Lia Lad LBb LoB =LCe Loc Lns COS 磁链方程 转矩方程 Lin=Ia=Lwe ha =Lc=Loe=Lm cost0+2) 电压方程 3 2π ● Lic=Lea=LBa=Lon Lcb Loc=Lmgs COS(0- 绕组间互感 定 运动方程 定、转子两相绕组轴线重合时 两者之间的互感值最大:Lms %% LAA LAB LAC LAa L Le i
异步电动机的三相数学模型 磁链方程 转矩方程 电压方程 运动方程 A AA AB AC Aa Ab Ac A B BA BB BC Ba Bb Bc B C CA CB CC Ca Cb Cc C a aA aB aC aa ab ac a b bA bB bC ba bb bc b c cA cB cC ca cb cc c L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i = cos 2 cos( ) 3 2 cos( ) 3 Aa aA Bb bB Cc cC ms Ab bA Bc cB Ca aC ms Ac cA Ba aB Cb bC ms L L L L L L L L L L L L L L L L L L L L L = = = = = = = = = = = = + = = = = = = − 由于相互间位置的变化可分别表示为: 定 转 子 绕 组 间 互 感 Lms 定、转子两相绕组轴线重合时 两者之间的互感值最大:

素群火学 电气工程学院运动控制系统 Xinjiang University 异步电动机的三相数学模型 EEN 分块矩阵表示 磁链方程 转矩方程 电压方程 武中 运动方程 ,=w,wawe了i,=E4iic]了 平,=山。w。w=b。 LAA LAB LAC Lo Lce Lab La Lc i
异步电动机的三相数学模型 磁链方程 转矩方程 电压方程 运动方程 A AA AB AC Aa Ab Ac A B BA BB BC Ba Bb Bc B C CA CB CC Ca Cb Cc C a aA aB aC aa ab ac a b bA bB bC ba bb bc b c cA cB cC ca cb cc c L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i L L L L L L i = s s ss sr r r rs rr = ψ L L i ψ L L i T ψs = A B C T ψr = a b c T s A B C i = i i i T r a b c i = i i i 分块矩阵表示 式中: