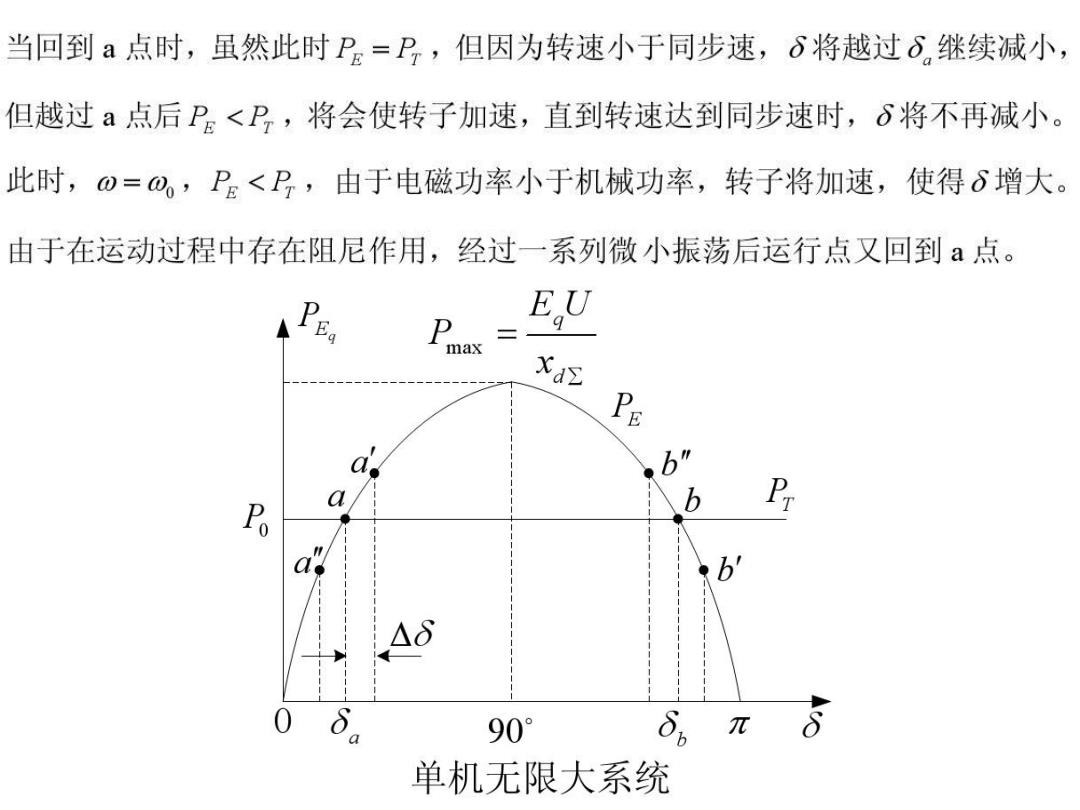
当回到a点时,虽然此时P。=P,但因为转速小于同步速,6将越过6,继续减小, 但越过a点后P。<P,将会使转子加速,直到转速达到同步速时,δ将不再减小。 此时,o=,P。<P,由于电磁功率小于机械功率,转子将加速,使得6增大。 由于在运动过程中存在阻尼作用,经过一系列微小振荡后运行点又回到点。 EU P ax Xa Pe b" P P △δ a 90° ⑧b π 单机无限大系统
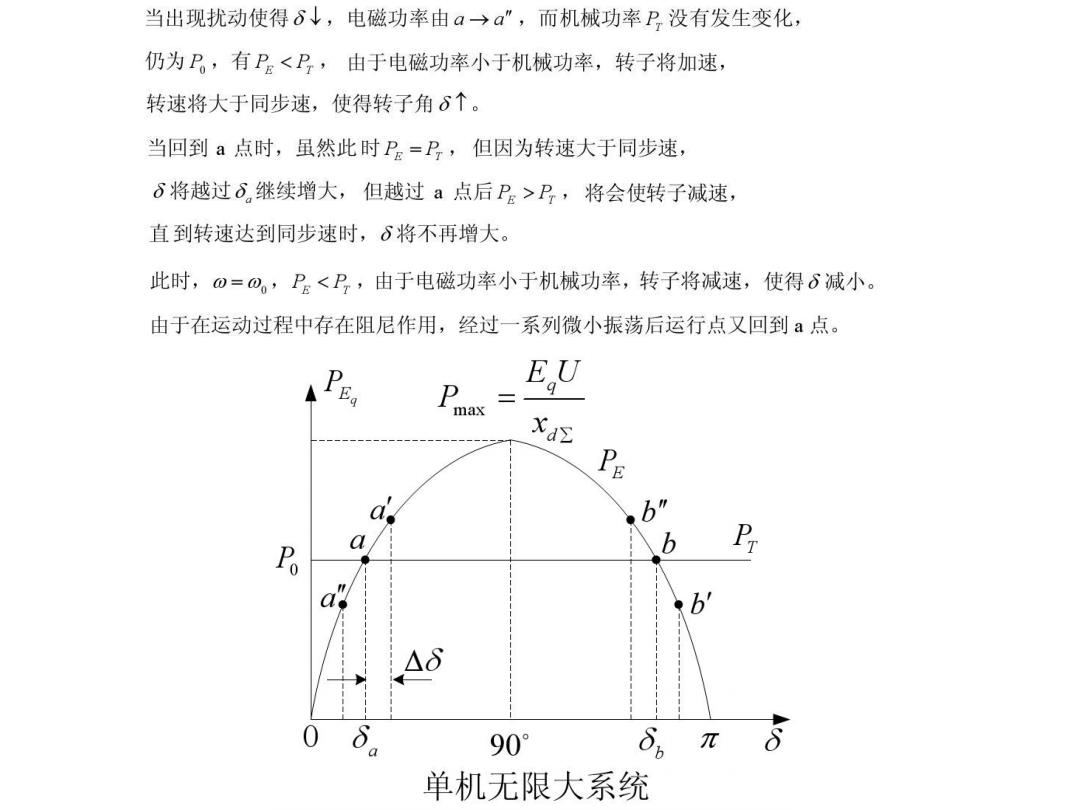
当出现扰动使得6↓,电磁功率由a→a”,而机械功率P,没有发生变化, 仍为P。,有P。<P,由于电磁功率小于机械功率,转子将加速, 转速将大于同步速,使得转子角6个。 当回到a点时,虽然此时P。=P,但因为转速大于同步速, 6将越过δ继续增大,但越过a点后P。>P,将会使转子减速, 直到转速达到同步速时,δ将不再增大。 此时,o=O。,P<卫,由于电磁功率小于机械功率,转子将减速,使得δ减小。 由于在运动过程中存在阻尼作用,经过一系列微小振荡后运行点又回到a点。 EU D max xa Pe a, b” a b P P b △8 0 a 90° 86 π 单机无限大系统