第2章机械图样绘制的基本原理 本章将从基本形体入手,介绍机械图样绘制的基本原理以及图物之间的对应关系。 2.1三视图及具投影规律 2.1.1正投影与视图 用正投影法得到的三视图能够准确、完整地表达机件的结构形状,而且作图方便、度量 性好,所以它是机械图样最主要的表达方法。 物体在阳光或灯光的照射下,会在地面或墙面上产生影子,这是投影的自然现象。人 们从物体和影子的对应关系中,总结出了用投影原理在平面上表达物体形状的正投影法, 如图2-1所示。 投影面 投影(视图) 援块 虚线表示看 不见的轮廓 图2-1正投影法 图中,平面V放置在拨块后面,若用一束与平面V垂直的平行光线照射拨块,在平面V 上就会出现拨块的影子。在正投影法中,该影子是一个以线条显示的平面图形,称为拨块在 平面V上的正投影(简称投影),而这些线条是拨块上内外表面边界轮廓线的投影。平面V 称为投影面:光线称为投射线。可见,正投影法的基本条件是投射线垂直于投影面。而这种 投射线相互平行的投影法,称为平行投影法
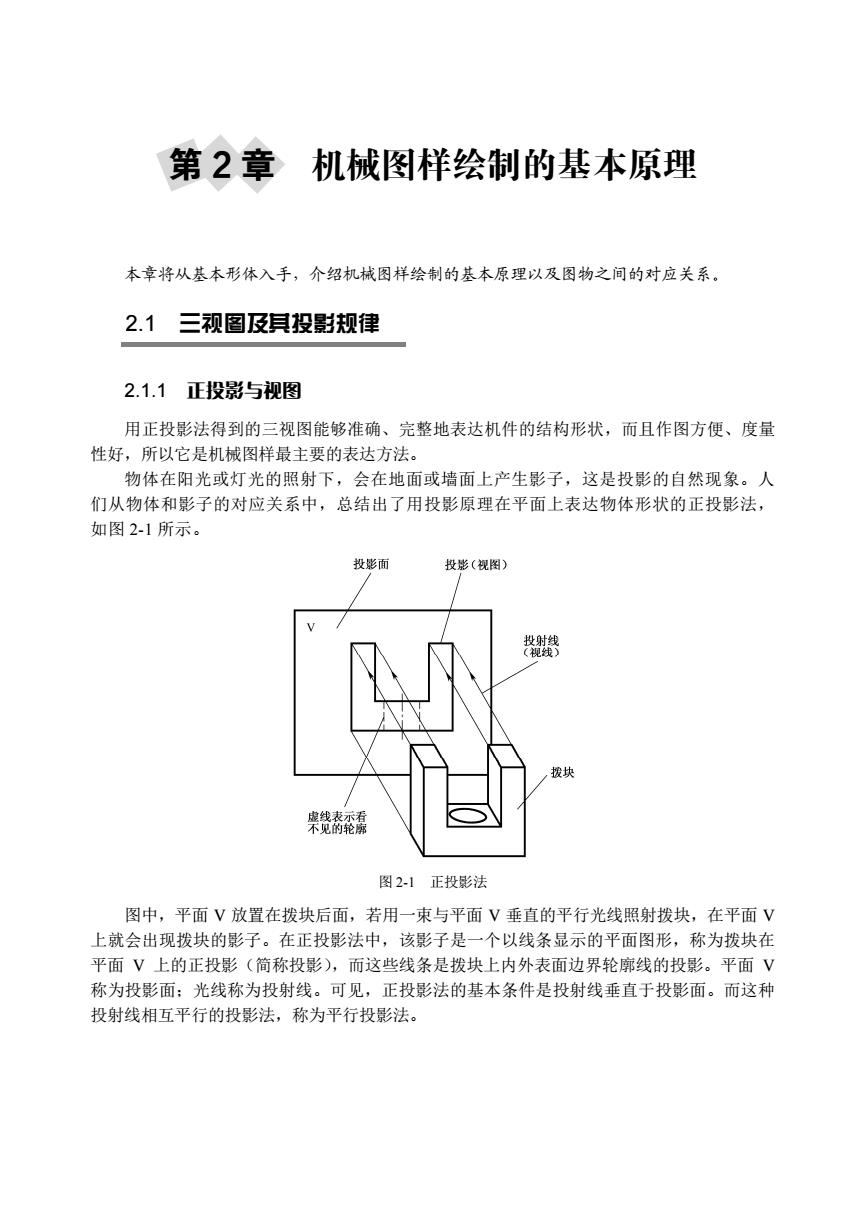
第2章 机械图样绘制的基本原理 本章将从基本形体入手,介绍机械图样绘制的基本原理以及图物之间的对应关系。 2.1 三视图及其投影规律 2.1.1 正投影与视图 用正投影法得到的三视图能够准确、完整地表达机件的结构形状,而且作图方便、度量 性好,所以它是机械图样最主要的表达方法。 物体在阳光或灯光的照射下,会在地面或墙面上产生影子,这是投影的自然现象。人 们从物体和影子的对应关系中,总结出了用投影原理在平面上表达物体形状的正投影法, 如图 2-1 所示。 图 2-1 正投影法 图中,平面 V 放置在拨块后面,若用一束与平面 V 垂直的平行光线照射拨块,在平面 V 上就会出现拨块的影子。在正投影法中,该影子是一个以线条显示的平面图形,称为拨块在 平面 V 上的正投影(简称投影),而这些线条是拨块上内外表面边界轮廓线的投影。平面 V 称为投影面;光线称为投射线。可见,正投影法的基本条件是投射线垂直于投影面。而这种 投射线相互平行的投影法,称为平行投影法
现代机械制图(第3版) 2.1.2三视图的形成及对应关系 如果把正投影法中的投射线看做人的视线,则投影面上出现的物体的投影就称为视图。 在图中,可见的轮廓线用粗实线绘制,不可见的轮廓线用虚线绘制。另外,用细点画线 表示物体的对称线、回转轴线和圆的中心线。 在正投影中,只用一个视图不能确定物体的形状和大小。如图2-2所示,两个形状不同 的压板,当按图示位置把它们向投影面V进行投影时,所得到的视图完全相同。为了准确地 表达物体的形状和大小,就需要从几个方向来进行观察,即从不同的方向进行投影得到几个 视图,互相补充。在实际绘图中常用的是三视图。三投影面体系如图2-3所示。 H 图2-2不同形状的压板在同一个投影面上的视图相同 图2-3三投影面体系 1.三视图的形成 三视图的形成过程如图2-4所示。 如图2-3所示,采用相互垂直的三个投影面,建立一个三投影面体系。正立投影面简称 正面,用V表示:水平投影面简称水平面,用H表示:侧立投影面简称侧面,用W表示。 两个投影面之间的交线称为投影轴。正面V与水平面H的交线称为X轴:水平面H与 侧面W的交线称为Y轴:正面V与侧面W的交线称为Z轴。X,Y,Z轴相互垂直,分别代 表物体长度、宽度、高度的方向,三个轴的交点O称为原点。 如图2-4(a)所示,将螺栓毛坯放置在三投影面体系中,按图中箭头的方向,用正投影 的方法得到螺栓毛坯在V面、H面、W面上的三个投影,分别称为正面投影、水平投影、侧 面投影。此三投影即为螺栓毛坯的三视图。 为便于画图,需将相互垂直的三个投影面展成一个平面(即图纸平面),如图2-4(b)所 示,展开时,V面的位置不变,H面绕X轴向下旋转90°,W面绕Z轴向右旋转90°,使之 与V面重合,便得到同一个平面上的三视图。其中,Y轴随H面旋转后以Y:表示,随W面 旋转后以Yw表示,如图2-4(c)所示。实际绘图时无须画出投影面的边框和投影轴,即得到 螺栓毛坯的三视图,如图2-4(d)所示。 在三视图中,正面投影是从前向后投射而得到的图形,通常表达物体的主要形状特征, 称为主视图:水平投影是从上向下投射而得到的图形,称为俯视图:侧面投影是从左向右投 射而得到的图形,称为左视图。 52
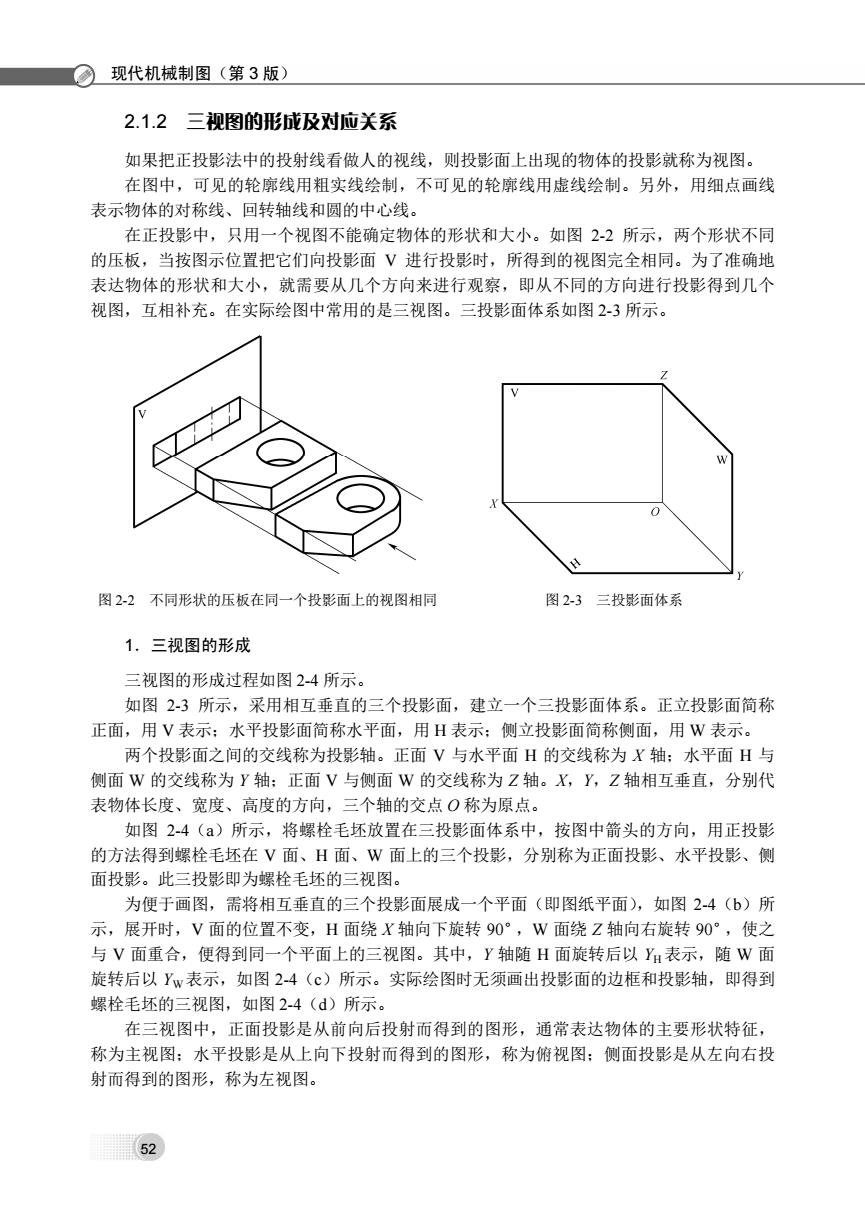
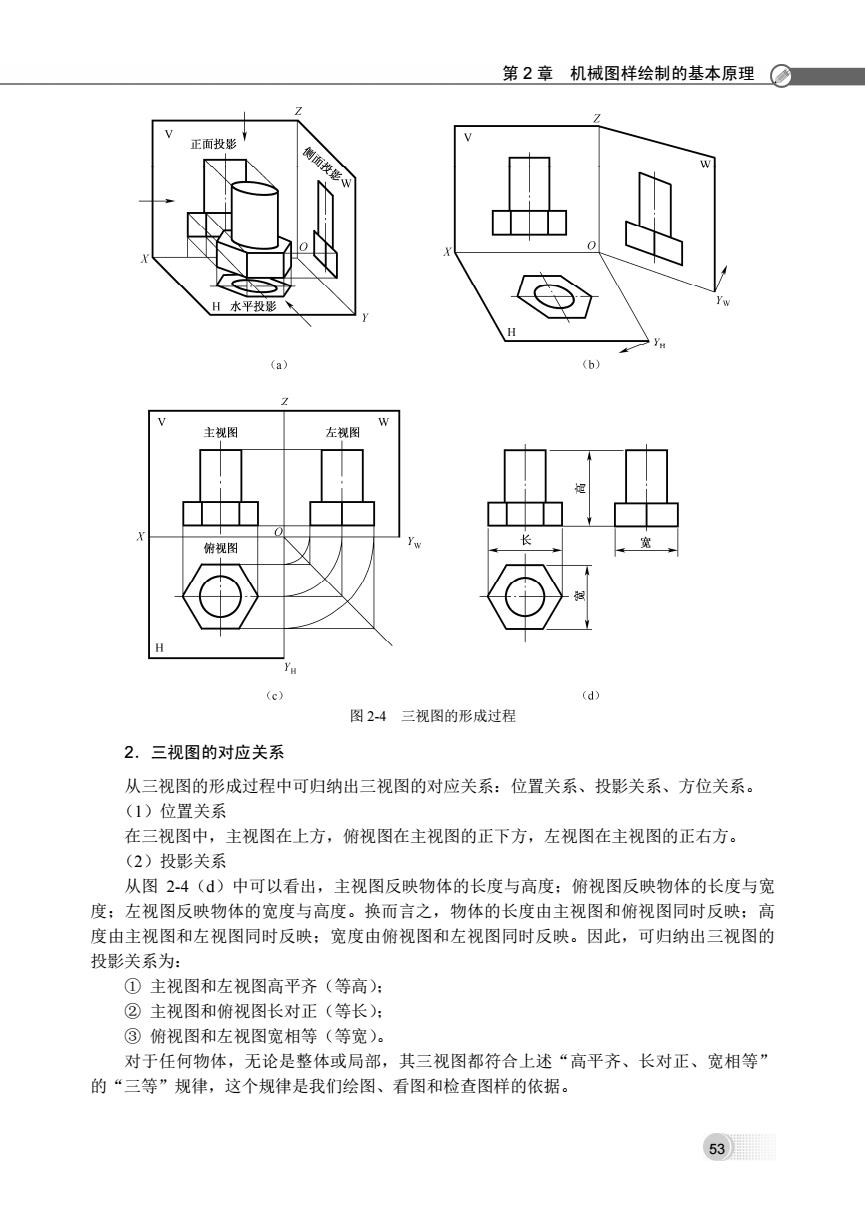
现代机械制图(第 3 版) 52 2.1.2 三视图的形成及对应关系 如果把正投影法中的投射线看做人的视线,则投影面上出现的物体的投影就称为视图。 在图中,可见的轮廓线用粗实线绘制,不可见的轮廓线用虚线绘制。另外,用细点画线 表示物体的对称线、回转轴线和圆的中心线。 在正投影中,只用一个视图不能确定物体的形状和大小。如图 2-2 所示,两个形状不同 的压板,当按图示位置把它们向投影面 V 进行投影时,所得到的视图完全相同。为了准确地 表达物体的形状和大小,就需要从几个方向来进行观察,即从不同的方向进行投影得到几个 视图,互相补充。在实际绘图中常用的是三视图。三投影面体系如图 2-3 所示。 图 2-2 不同形状的压板在同一个投影面上的视图相同 图 2-3 三投影面体系 1.三视图的形成 三视图的形成过程如图 2-4 所示。 如图 2-3 所示,采用相互垂直的三个投影面,建立一个三投影面体系。正立投影面简称 正面,用 V 表示;水平投影面简称水平面,用 H 表示;侧立投影面简称侧面,用 W 表示。 两个投影面之间的交线称为投影轴。正面 V 与水平面 H 的交线称为 X 轴;水平面 H 与 侧面 W 的交线称为 Y 轴;正面 V 与侧面 W 的交线称为 Z 轴。X,Y,Z 轴相互垂直,分别代 表物体长度、宽度、高度的方向,三个轴的交点 O 称为原点。 如图 2-4(a)所示,将螺栓毛坯放置在三投影面体系中,按图中箭头的方向,用正投影 的方法得到螺栓毛坯在 V 面、H 面、W 面上的三个投影,分别称为正面投影、水平投影、侧 面投影。此三投影即为螺栓毛坯的三视图。 为便于画图,需将相互垂直的三个投影面展成一个平面(即图纸平面),如图 2-4(b)所 示,展开时,V 面的位置不变,H 面绕 X 轴向下旋转 90°,W 面绕 Z 轴向右旋转 90°,使之 与 V 面重合,便得到同一个平面上的三视图。其中,Y 轴随 H 面旋转后以 YH表示,随 W 面 旋转后以 YW表示,如图 2-4(c)所示。实际绘图时无须画出投影面的边框和投影轴,即得到 螺栓毛坯的三视图,如图 2-4(d)所示。 在三视图中,正面投影是从前向后投射而得到的图形,通常表达物体的主要形状特征, 称为主视图;水平投影是从上向下投射而得到的图形,称为俯视图;侧面投影是从左向右投 射而得到的图形,称为左视图
第2章机械图样绘制的基本原理○ 2 正面投影 侧面投影 H水平投影 (a) (b) 主视图 左视图 X 俯视图 长 H (c) (d) 图2-4三视图的形成过程 2.三视图的对应关系 从三视图的形成过程中可归纳出三视图的对应关系:位置关系、投影关系、方位关系。 (1)位置关系 在三视图中,主视图在上方,俯视图在主视图的正下方,左视图在主视图的正右方。 (2)投影关系 从图2-4(d)中可以看出,主视图反映物体的长度与高度:俯视图反映物体的长度与宽 度:左视图反映物体的宽度与高度。换而言之,物体的长度由主视图和俯视图同时反映:高 度由主视图和左视图同时反映:宽度由俯视图和左视图同时反映。因此,可归纳出三视图的 投影关系为: ①主视图和左视图高平齐(等高): ②主视图和俯视图长对正(等长): ③俯视图和左视图宽相等(等宽)。 对于任何物体,无论是整体或局部,其三视图都符合上述“高平齐、长对正、宽相等” 的“三等”规律,这个规律是我们绘图、看图和检查图样的依据。 53
第 2 章 机械图样绘制的基本原理 53 图 2-4 三视图的形成过程 2.三视图的对应关系 从三视图的形成过程中可归纳出三视图的对应关系:位置关系、投影关系、方位关系。 (1)位置关系 在三视图中,主视图在上方,俯视图在主视图的正下方,左视图在主视图的正右方。 (2)投影关系 从图 2-4(d)中可以看出,主视图反映物体的长度与高度;俯视图反映物体的长度与宽 度;左视图反映物体的宽度与高度。换而言之,物体的长度由主视图和俯视图同时反映;高 度由主视图和左视图同时反映;宽度由俯视图和左视图同时反映。因此,可归纳出三视图的 投影关系为: ① 主视图和左视图高平齐(等高); ② 主视图和俯视图长对正(等长); ③ 俯视图和左视图宽相等(等宽)。 对于任何物体,无论是整体或局部,其三视图都符合上述“高平齐、长对正、宽相等” 的“三等”规律,这个规律是我们绘图、看图和检查图样的依据
现代机械制图(第3版) 作图时,可利用自点O所作的与水平方向成角为45°的辅助直线或以点O为圆心所作的 辅助圆弧来实现俯视图与左视图宽度相等的关系,如图2-4(c)所示。 (3)方位关系 三视图能够反映物体各部分之间上下、左右、前后的方位关系。如图2-5(a)所示,当 支架在三面体系中的位置确定后,其各部分之间上下、左右、前后的方位关系就能通过支架 的三视图反映出来,如图2-5(b)所示。例如,支架的支撑板在底板之上,靠右后方:底板 的左前方被平面切去一角。因此,从图2-5中,可归纳出三视图的方位关系为: ①主视图反映上下、左右方位: ②俯视图反映前后、左右方位: ③左视图反映上下、前后方位。 后 左 前 H (a) (b 图2-5三视图反映物体的方位关系 应该指出,物体各部分之间上下、左右的方位关系容易从主视图上得到直观判断: 而前、后方位关系却不能从俯视图和左视图上进行直观判断。对于俯视图和左视图来 说,凡靠近主视图的一侧(里面),是物体的后方:凡远离主视图的一侧(外面),是物 体的前方。 2.2垦本形体的三视图 2.2.1基本形体及其三视图 机件(机器的零件和部件),不管其形状有多复杂,一般都可视做由简单的基本形体组合 而成,如图2-6所示球阀的各部分就是如此。其中,棱柱体和棱锥体的表面都是平面,称之 为平面体:表面是回转面或是回转面和平面的圆柱体、圆锥体、球体和圆环体,称之为回转 体。它们是常见的基本形体。 不同形状或不同位置的基本形体有不同的投影特点,即它们的三视图有不同的图形特征。掌 握基本形体的三视图特征,有利于根据三视图较快地识别出各种基本形体,这是看懂机械图样的 基础。常见基本形体在特殊位置情况下的三视图及其图形特征见表2-1,供读者分析比较。 54
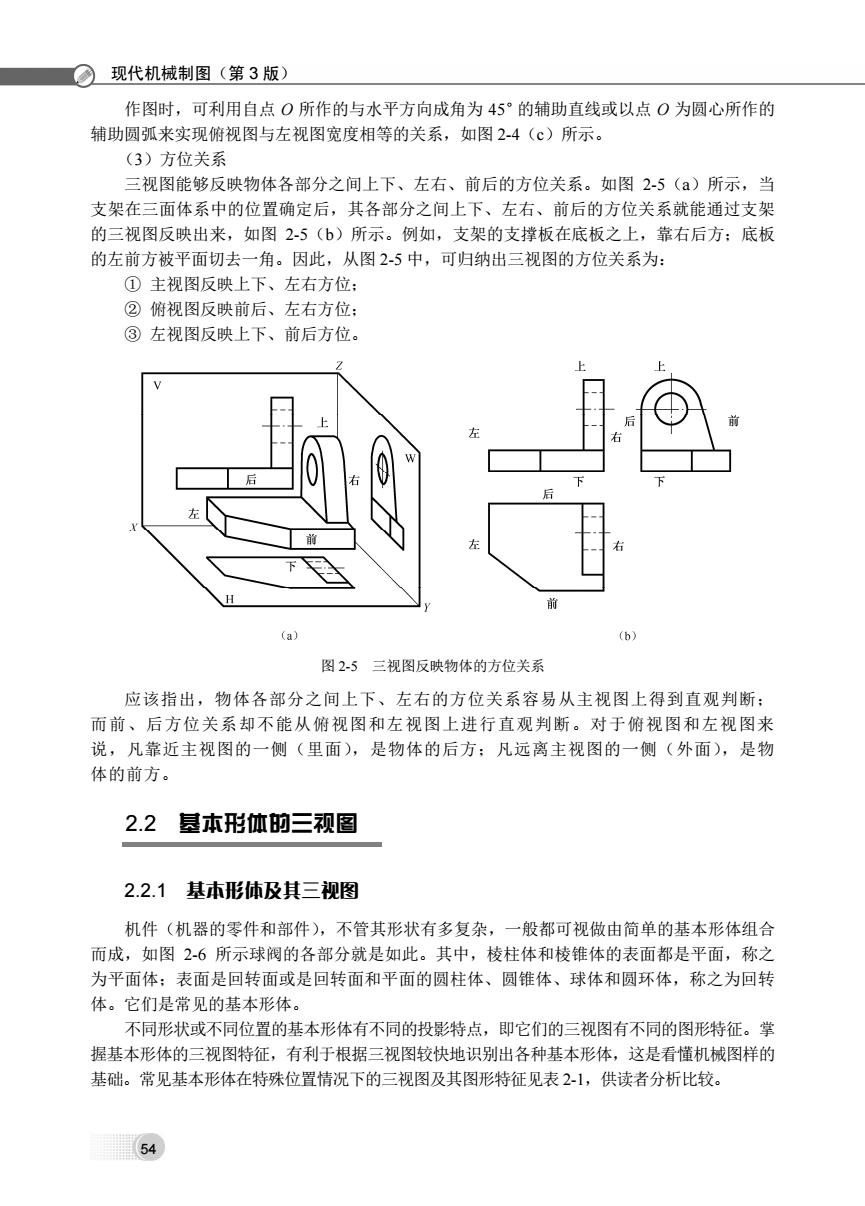
现代机械制图(第 3 版) 54 作图时,可利用自点 O 所作的与水平方向成角为 45°的辅助直线或以点 O 为圆心所作的 辅助圆弧来实现俯视图与左视图宽度相等的关系,如图 2-4(c)所示。 (3)方位关系 三视图能够反映物体各部分之间上下、左右、前后的方位关系。如图 2-5(a)所示,当 支架在三面体系中的位置确定后,其各部分之间上下、左右、前后的方位关系就能通过支架 的三视图反映出来,如图 2-5(b)所示。例如,支架的支撑板在底板之上,靠右后方;底板 的左前方被平面切去一角。因此,从图 2-5 中,可归纳出三视图的方位关系为: ① 主视图反映上下、左右方位; ② 俯视图反映前后、左右方位; ③ 左视图反映上下、前后方位。 图 2-5 三视图反映物体的方位关系 应该指出,物体各部分之间上下、左右的方位关系容易从主视图上得到直观判断; 而前、后方位关系却不能从俯视图和左视图上进行直观判断。对于俯视图和左视图来 说,凡靠近主视图的一侧(里面),是物体的后方;凡远离主视图的一侧(外面),是物 体的前方。 2.2 基本形体的三视图 2.2.1 基本形体及其三视图 机件(机器的零件和部件),不管其形状有多复杂,一般都可视做由简单的基本形体组合 而成,如图 2-6 所示球阀的各部分就是如此。其中,棱柱体和棱锥体的表面都是平面,称之 为平面体;表面是回转面或是回转面和平面的圆柱体、圆锥体、球体和圆环体,称之为回转 体。它们是常见的基本形体。 不同形状或不同位置的基本形体有不同的投影特点,即它们的三视图有不同的图形特征。掌 握基本形体的三视图特征,有利于根据三视图较快地识别出各种基本形体,这是看懂机械图样的 基础。常见基本形体在特殊位置情况下的三视图及其图形特征见表 2-1,供读者分析比较
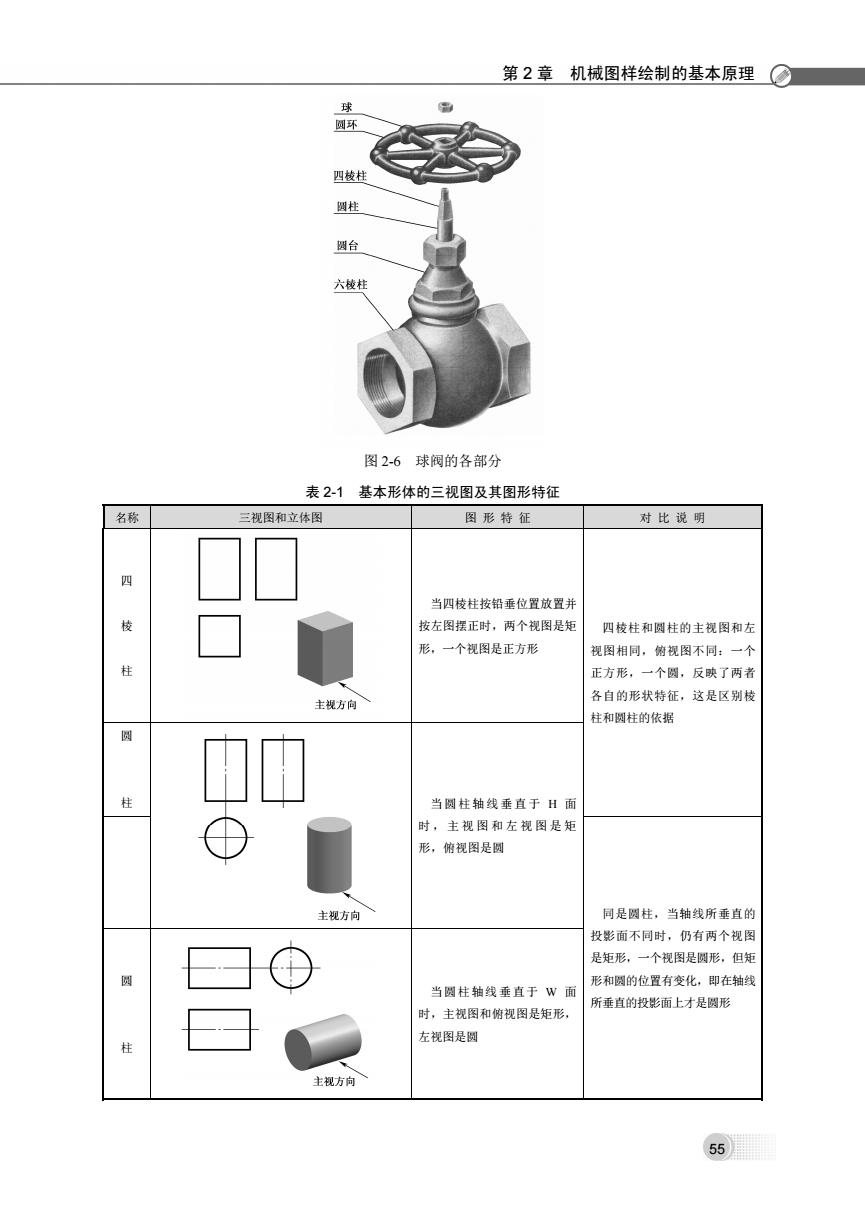
第2章机械图样绘制的基本原理 球 圆环 四棱柱 圆柱 圆台 六棱柱 图2-6球阀的各部分 表2-1基本形体的三视图及其图形特征 名称 三视图和立体图 图形特征 对比说明 四 当四棱柱按铅垂位置放置并 按左图摆正时,两个视图是矩 四棱柱和圆柱的主视图和左 形,一个视图是正方形 视图相同,俯视图不同:一个 柱 正方形,一个圆,反映了两者 各自的形状特征,这是区别棱 主视方向 柱和圆柱的依据 圆 柱 当圆柱轴线垂直于H面 时,主视图和左视图是矩 形,俯视图是圆 主视方向 同是圆柱,当轴线所垂直的 投影面不同时,仍有两个视图 是矩形,一个视图是圆形,但矩 圆 形和圆的位置有变化,即在轴线 当圆柱轴线垂直于W面 所垂直的投影面上才是圆形 时,主视图和俯视图是矩形, 左视图是圆 柱 主视方向 55
第 2 章 机械图样绘制的基本原理 55 图 2-6 球阀的各部分 表 2-1 基本形体的三视图及其图形特征 名称 三视图和立体图 图 形 特 征 对 比 说 明 四 棱 柱 当四棱柱按铅垂位置放置并 按左图摆正时,两个视图是矩 形,一个视图是正方形 四棱柱和圆柱的主视图和左 视图相同,俯视图不同:一个 正方形,一个圆,反映了两者 各自的形状特征,这是区别棱 柱和圆柱的依据 圆 柱 当圆柱轴线垂直于 H 面 时,主视图和左视图是矩 形,俯视图是圆 同是圆柱,当轴线所垂直的 投影面不同时,仍有两个视图 是矩形,一个视图是圆形,但矩 形和圆的位置有变化,即在轴线 所垂直的投影面上才是圆形 圆 柱 当圆柱轴线垂直于 W 面 时,主视图和俯视图是矩形, 左视图是圆