A6/() D=0 100 D=0.025 ----D=0.05 80 D=0.075 D-0.10 D=-0.01 60 40 20 t/s 0 十012 3 5 6-t仿真曲线
@/(rad/s) 系统失 318 去同步 317 316 315 D=0 ——D=0.025 314 -·--D=0.05 313 D=0.075 D=0.10 312 D=-0.01 311 t/s 310 0 1 2 3 4 5 o-t仿真曲线

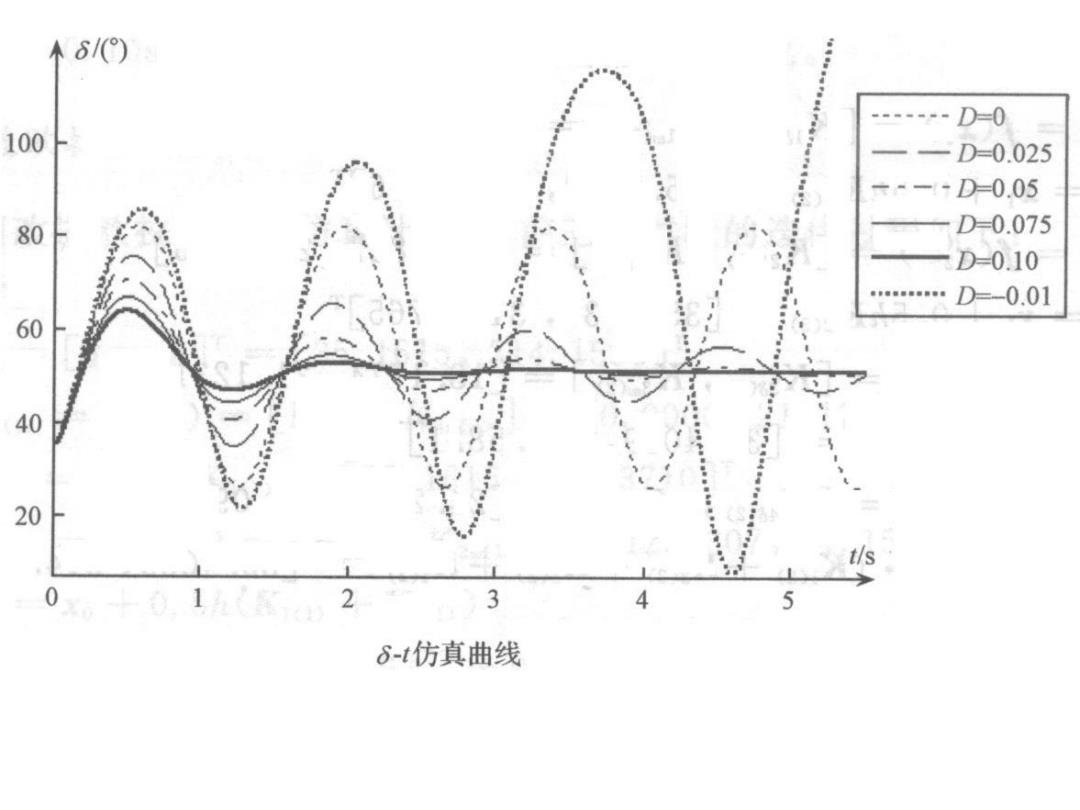
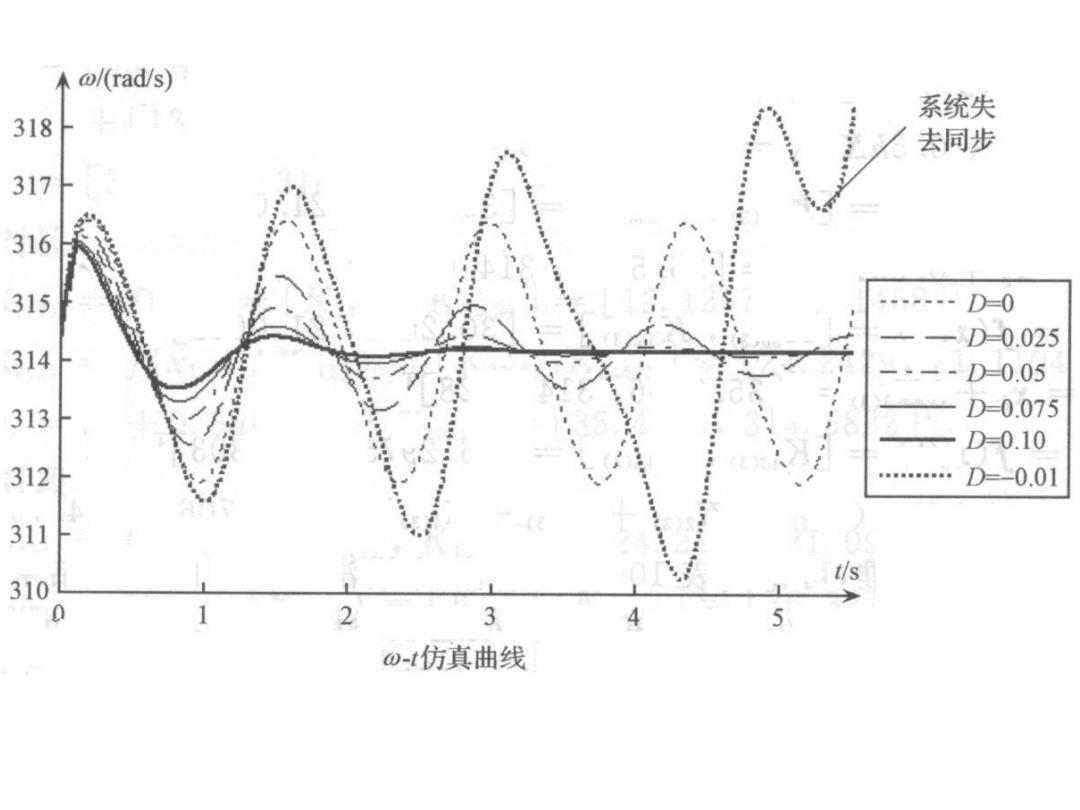
从图中可以看到,阻尼对系统的暂态过程影响较大。 (1)当系统不存在阻尼(D=0)时,在故障发生后, 系统的功角和角速度均作等幅振荡。 (2)当系统存在正的阻尼(D>0)时,在故障发生 后,系统的功角和角速度的振幅均逐渐衰减。随 着时间的增长,系统逐渐回到平衡状态。且系统 阻尼越强(即D的取值越大),功角和角速度的振荡 衰减速度越快,系统越容易回到平衡状态
从图中可以看到,阻尼对系统的暂态过程影响较大。 (1)当系统不存在阻尼(D=0)时,在故障发生后, 系统的功角和角速度均作等幅振荡。 (2)当系统存在正的阻尼(D>0)时,在故障发生 后,系统的功角和角速度的振幅均逐渐衰减。随 着时间的增长,系统逐渐回到平衡状态。且系统 阻尼越强(即D的取值越大),功角和角速度的振荡 衰减速度越快,系统越容易回到平衡状态

●(3)当系统存在负阻尼D<0)时,在故障 发生后,系统功角和角速度出现了增幅振 荡,系统无法恢复到稳定运行状态。电力 系统中的负阻尼现象,往往是由于控制设 备参数取值不合理或控制环节参数不匹配 造成的,在实际系统中应尽量避免
(3)当系统存在负阻尼(D<0)时,在故障 发生后,系统功角和角速度出现了增幅振 荡,系统无法恢复到稳定运行状态。电力 系统中的负阻尼现象,往往是由于控制设 备参数取值不合理或控制环节参数不匹配 造成的,在实际系统中应尽量避免