亲题火学 Xinjiang University 电气工程学院运动控制系统 3.2.1转速、电流反馈控制直流调速系统的动态数学模型 双闭环直流调速系统的动态结构图 U啦☒ Uao d 队sR(S) WCR(s) Ks 1/R d TsS+1 Tis+1 a 对调速系统 跟随性能可以 能否实现所期望的恒加速 而言,被控 用阶跃给定下 过程,最终以时间最优的 制的对象是 的动态响应描 形式达到所要求的性能指 转速。 述。 标,是设置双闭环控制的 一个重要的追求目标
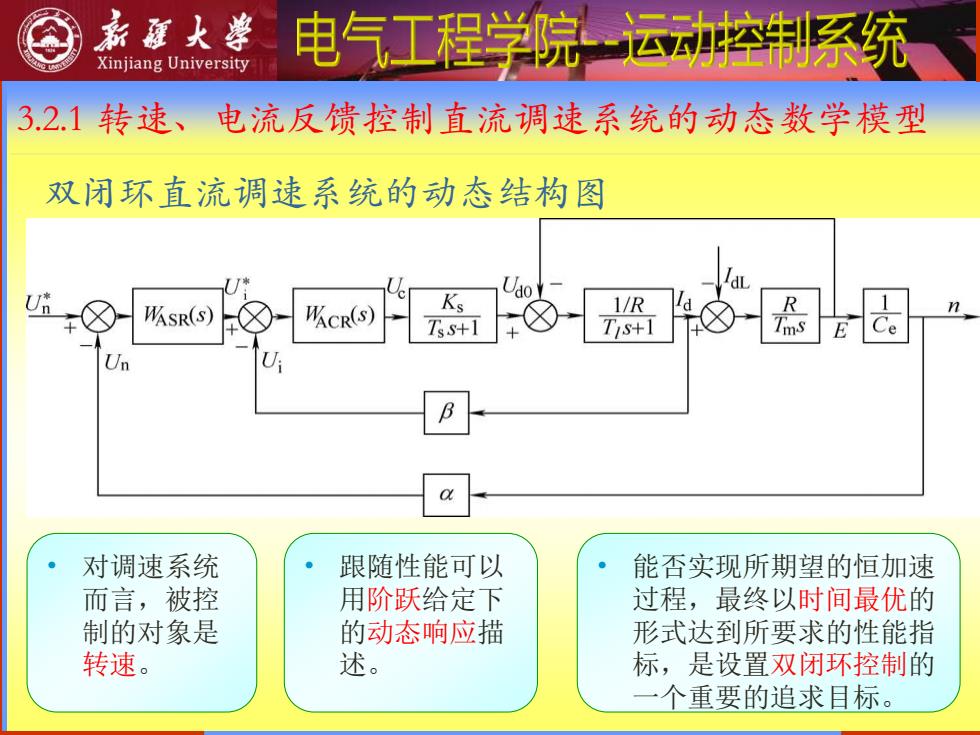
3.2.1 转速、电流反馈控制直流调速系统的动态数学模型 双闭环直流调速系统的动态结构图 • 对调速系统 而言,被控 制的对象是 转速。 • 跟随性能可以 用阶跃给定下 的动态响应描 述。 • 能否实现所期望的恒加速 过程,最终以时间最优的 形式达到所要求的性能指 标,是设置双闭环控制的 一个重要的追求目标
新庭大学 Xinjiang University 电气工程学院-运动控制系统 1.起动过程分析 4产生超调后,到达 3转速波形先是缓 给定值n。 慢升速,然后 以恒加速上升 1电流1从零增长 2电流下降并经 到1m,然后在一 段时间内维持其 调节后到达稳态 值等于linm不变。 值lao 双闭环直流调速系统起动过程的转速和电流波形 起动过程分为电流上升、恒流升速和转速调节三个阶段 转速调节器在此三个阶段中经历了不饱和、饱和以及退饱和三种情况
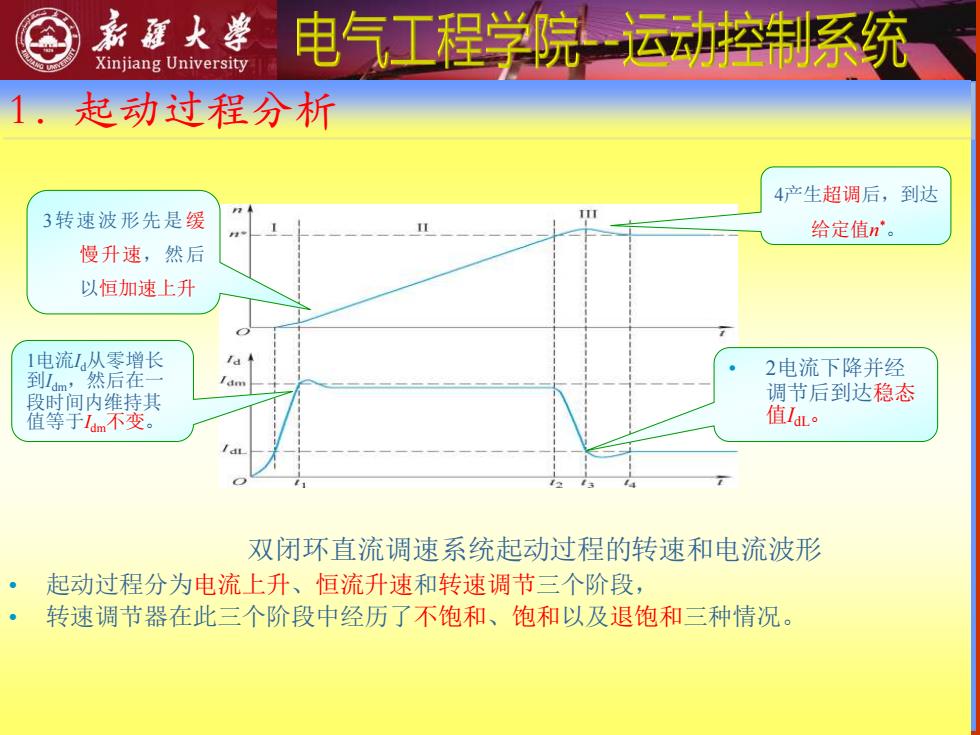
双闭环直流调速系统起动过程的转速和电流波形 • 起动过程分为电流上升、恒流升速和转速调节三个阶段, • 转速调节器在此三个阶段中经历了不饱和、饱和以及退饱和三种情况。 1.起动过程分析 1电流Id从零增长 到Idm,然后在一 段时间内维持其 值等于Idm不变。 4产生超调后,到达 给定值n 3转速波形先是缓 *。 慢升速,然后 以恒加速上升 • 2电流下降并经 调节后到达稳态 值IdL
系庭大学 Xinjiang University 电气工程学院运动控制系统 第I阶段:电流上升阶段(O) 当Ia≥IaL后,电机起 在上升到之前, 电动机转矩小于负载 动,由于电机惯 转矩,转速为零。 性作用,转速增 长缓慢 ASR输入偏差电压 仍较大,ASR很 快进入饱和状态, 在=O时,系统突加阶跃 而ACR一般不饱 和。直到la=Iam 给定信号U。,1a很 U=U'm。 快上升
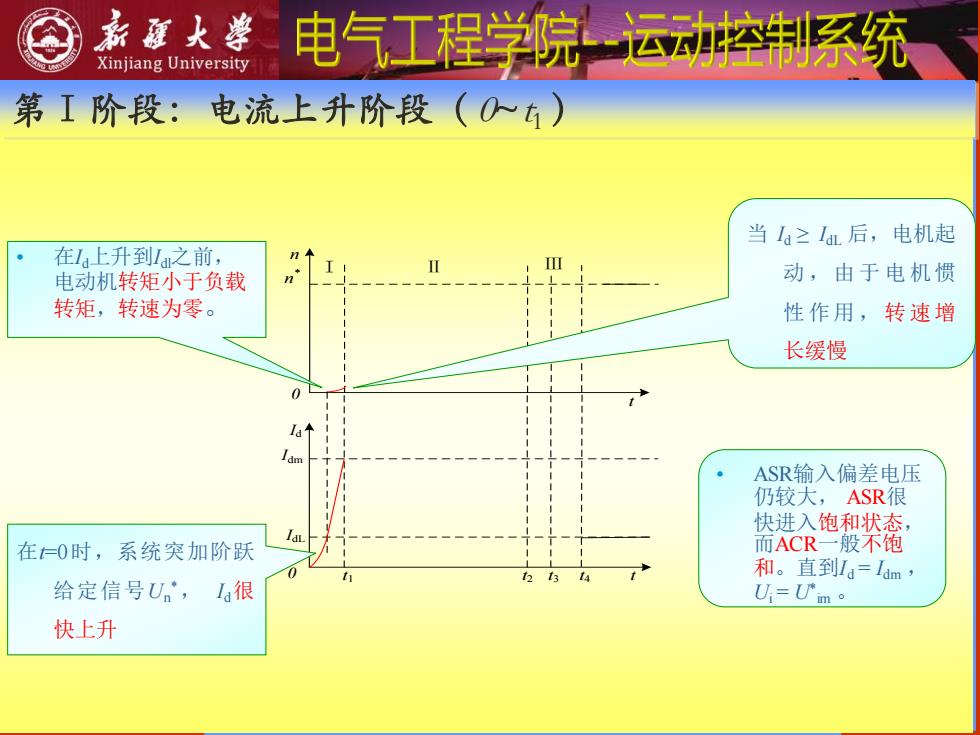
第Ⅰ阶段:电流上升阶段(0~t1) Ⅰ Ⅱ Ⅲ n n* t t1 t2 t3 t4 t Id IdL Idm 0 0 在t=0时,系统突加阶跃 给定信号Un *, Id很 快上升 • 在Id上升到Idl之前, 电动机转矩小于负载 转矩,转速为零。 当 Id ≥ IdL 后,电机起 动 ,由于电 机惯 性 作用 , 转 速增 长缓慢 • ASR输入偏差电压 仍较大, ASR很 快进入饱和状态, 而ACR一般不饱 和。直到Id = Idm , Ui = U* im
新庭火学 Xinjiang University 电气工程学院运动控制系统 第Ⅱ阶段:恒流升速阶段((~) 电动机加速到 了给定值n* Id基本保持在Idm ASR调节器始终保持在饱和状态,转速环仍相当于开环工作。系统表现为使用PI 调节器的电流闭环控制 电流调节器的给定值就是ASR调节器的饱和值Um,基本上保持电流山a=I不变 电流闭环调节的扰动是电动机的反电动势,它是一个线性渐增的斜坡扰动量, 系统做不到无静差,而是Ia略低于Iam
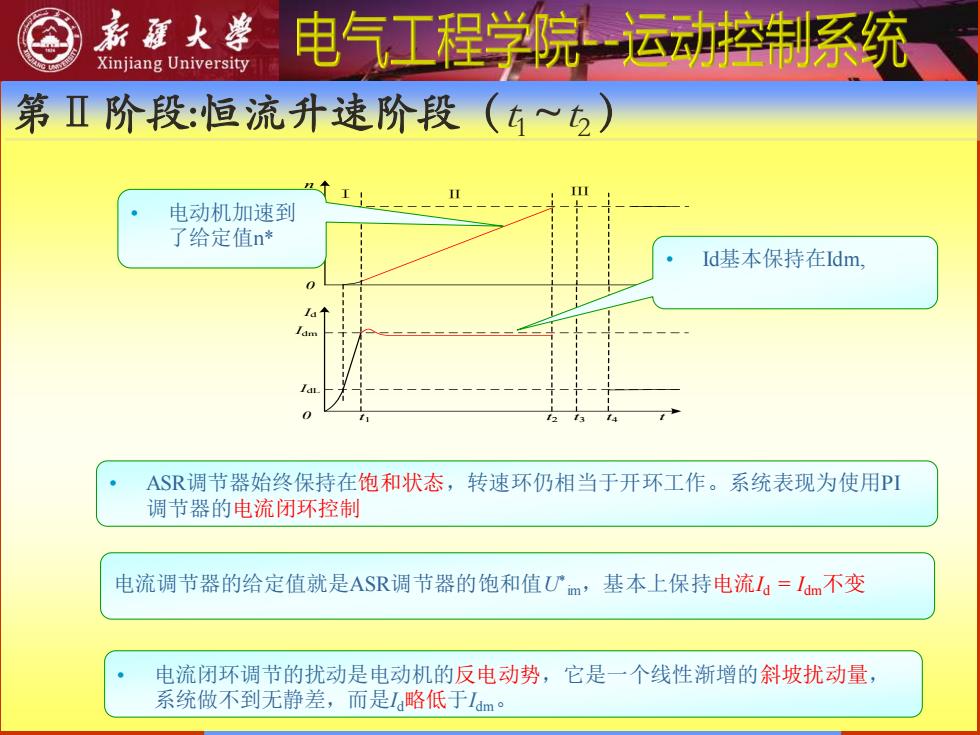
第Ⅱ阶段:恒流升速阶段(t1 ~t 2 ) n Ⅰ Ⅱ Ⅲ n* t t1 t2 t3 t4 t Id IdL Idm 0 0 • Id基本保持在Idm, • 电动机加速到 了给定值n* • ASR调节器始终保持在饱和状态,转速环仍相当于开环工作。系统表现为使用PI 调节器的电流闭环控制 电流调节器的给定值就是ASR调节器的饱和值U* im,基本上保持电流Id = Idm不变 • 电流闭环调节的扰动是电动机的反电动势,它是一个线性渐增的斜坡扰动量, 系统做不到无静差,而是Id略低于Idm

条莲火学 Xinjiang University 电气工程学院运动控制系统 第Ⅲ阶段:转速调节阶段(6以后) n上升到了给定值 在14时间内,d <I,转速由加速变 n',4Un=0。 为减速,直到稳定 1>L,电动机仍 处于加速过程 使n超过了n°,称 1a个 之为起动过程的 /dm 转速超调 /aL 转速的超调造成了4U<O,ASR退出饱和状态,U和Ia很快下降。转速仍在上升 直到=1时,I。I,转速才到达峰值。 如果调节器参数整定得不够好,也会有一段振荡的过程 在第Ⅲ阶段中,ASR和ACR都不饱和,电流内环是一个电流随动子系统
第Ⅲ阶段:转速调节阶段(t2以后) n Ⅰ Ⅱ Ⅲ n* t t1 t2 t3 t4 t Id IdL Idm 0 0 n上升到了给定值 n *, ΔUn=0。 • Id>Idl,电动机仍 处于加速过程 • 使n超过了n * ,称 之为起动过程的 转速超调 • 转速的超调造成了ΔUn<0,ASR退出饱和状态,Ui和Id很快下降。转速仍在上升 直到t=t3时,Id= Idl ,转速才到达峰值。 • 在t3~t4时间内, Id <Idl,转速由加速变 为减速,直到稳定 • 如果调节器参数整定得不够好,也会有一段振荡的过程 • 在第Ⅲ阶段中, ASR和ACR都不饱和,电流内环是一个电流随动子系统