新庭火学 Xinjiang University 电气工程学院运动控制系统 3.1.2 稳态结构图与参数计算 度賨霾贵及赢电滦馨堡笔流溪夏犧麦馨第」 在达到稳态转速后, 在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和 电流, 把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制 电力电子变换器UPE。 公团环结构上看,鼎流环在黑面:称作内环转速环套外边,称作外环。形 成了转速、电流反馈控制直流调速系统(简称双闭环系统)。 电流反馈系数 内 转速反馈系数 双闭环直流调速系统的稳态结构图
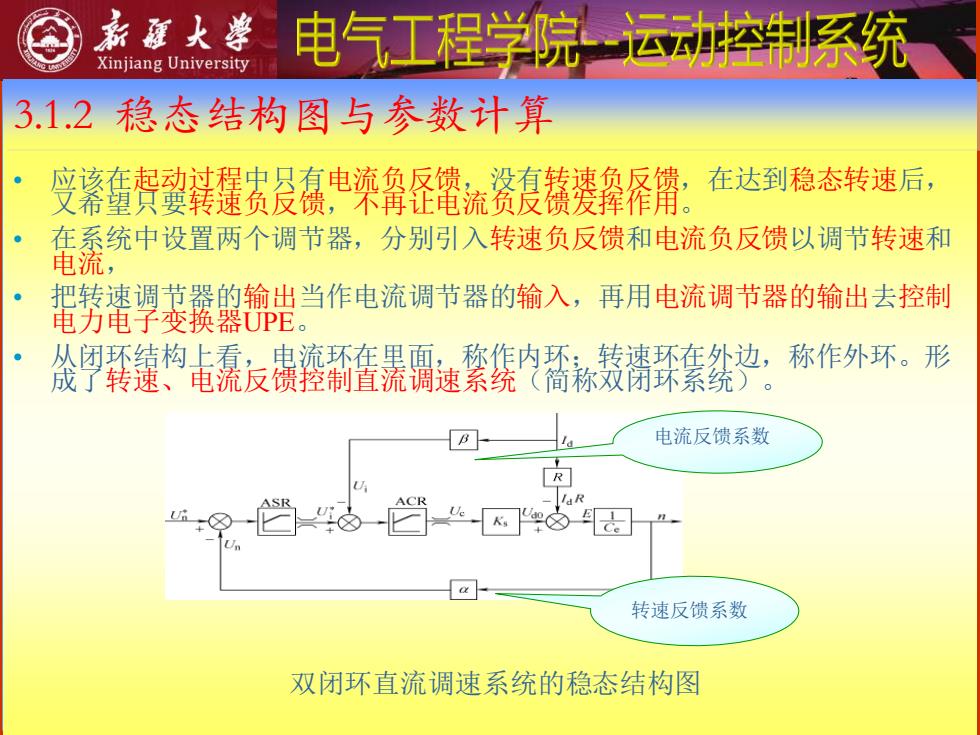
• 应该在起动过程中只有电流负反馈,没有转速负反馈,在达到稳态转速后, 又希望只要转速负反馈,不再让电流负反馈发挥作用。 • 在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和 电流, • 把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制 电力电子变换器UPE。 • 从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。形 成了转速、电流反馈控制直流调速系统(简称双闭环系统)。 3.1.2 稳态结构图与参数计算 电流反馈系数 转速反馈系数 双闭环直流调速系统的稳态结构图
系庭大学 Xinjiang University 电气工程学院运动控制系统 3.1.2稳态结构图与参数计算 1.稳态结构图和静特性 (1)转速调节器不饱和 两个调节器都不饱和,稳态时,它们的输入偏差电压都是零。 d 转速反馈电压 电流反馈电压 U=U=Bld 转速 U n 二no <I dm x
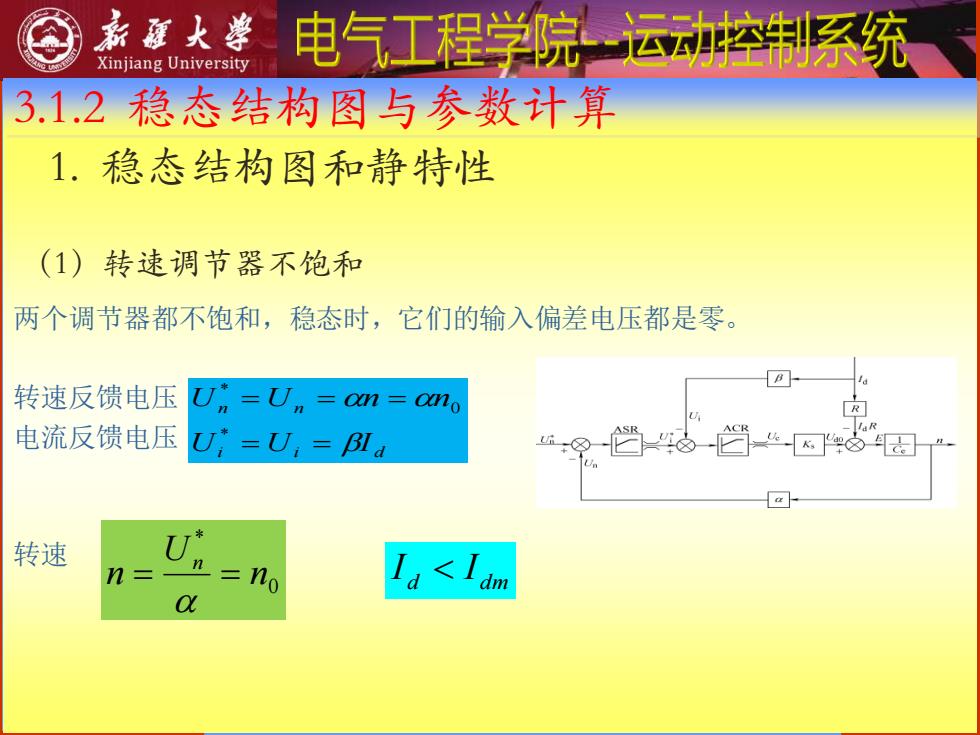
两个调节器都不饱和,稳态时,它们的输入偏差电压都是零。 转速反馈电压 电流反馈电压 转速 3.1.2 稳态结构图与参数计算 i i d n n U U I U U n n = = = = = * 0 * 0 * n U n n = = d dm I I (1)转速调节器不饱和 1. 稳态结构图和静特性
嘉原火学 Xinjiang University 电气工程学院-运动控制系统 AB段是两个调节器都不饱和 时的静特性,Id<Idm,n=n0。 BC段是ASR调节器饱和 时的静特性,Id=Idm, n<n0. /dN /dm d 双闭环直流调速系统的静特性 在负载电流小于Im时表现为转速无静差,转速负反馈起主要调节作用。 当负载电流达到m时转速调节器为饱和输出Um, 电流调节器起主要调节作用 系统表现为电流无静差 采用两个P调节器形成了内、外两个闭环的效果。 当ASR处于饱和状态时,I。=am,若负载电流减小,l<m,使转速上升,>, n<0,ASR反向积分,使ASR调节器退出饱和
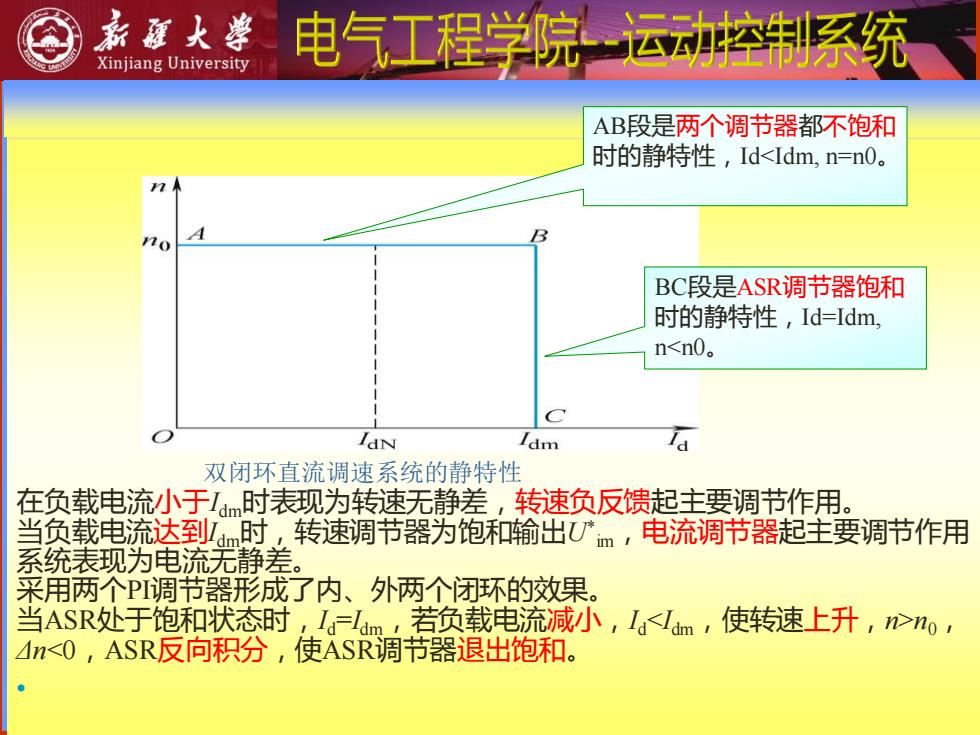
在负载电流小于Idm时表现为转速无静差,转速负反馈起主要调节作用。 当负载电流达到Idm时,转速调节器为饱和输出U* im,电流调节器起主要调节作用, 系统表现为电流无静差。 采用两个PI调节器形成了内、外两个闭环的效果。 当ASR处于饱和状态时,Id=Idm,若负载电流减小,Id<Idm,使转速上升,n>n0, Δn<0,ASR反向积分,使ASR调节器退出饱和。 • 双闭环直流调速系统的静特性 AB段是两个调节器都不饱和 时的静特性,Id<Idm, n=n0。 BC段是ASR调节器饱和 时的静特性,Id=Idm, n<n0
亲群大学 Xinjiang University 电气工程学院运动控制系统 (2)转速调节器饱和 ASR输出达到限幅值时,转速外环呈开环状态,转速的变化对转 速环不再产生影响。 ·双闭环系统变成一个电流无静差的单电流闭环调节系统。稳态时 U im
• ASR输出达到限幅值时,转速外环呈开环状态,转速的变化对转 速环不再产生影响。 • 双闭环系统变成一个电流无静差的单电流闭环调节系统。稳态时 dm im d I U I = = * (2)转速调节器饱和
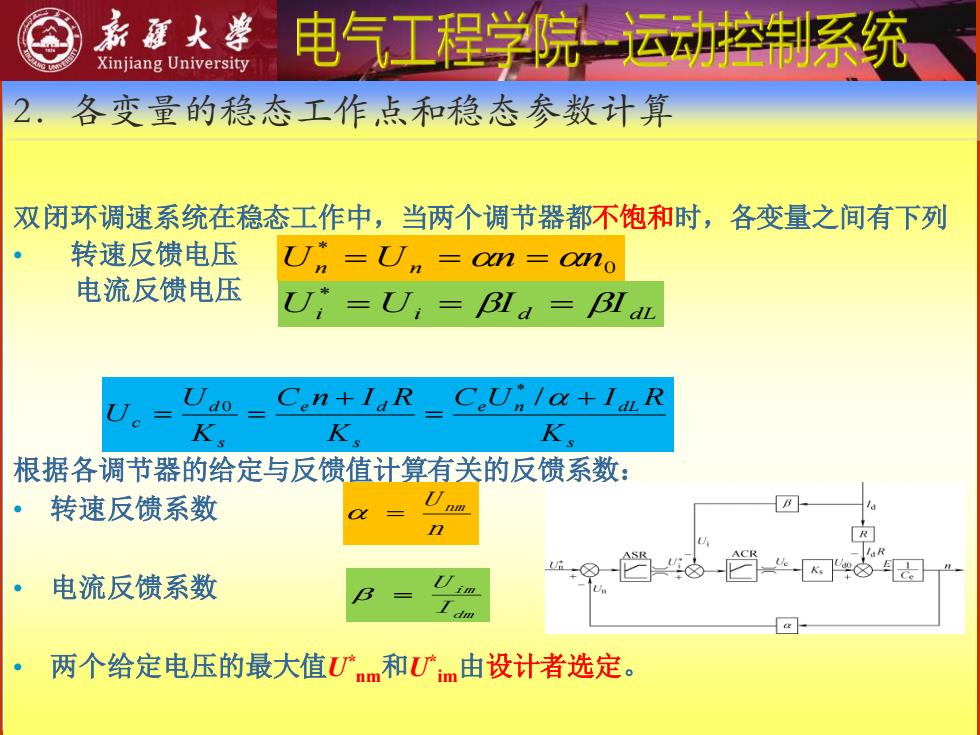
新庭火学 Xinjiang University 电气工程学院运动控制系统 2.各变量的稳态工作点和稳态参数计算 双闭环调速系统在稳态工作中,当两个调节器都不饱和时,各变量之间有下列 转速反馈电压 U=Un amn ano 电流反馈电压 U=U-BId=BIdL. U。 Cn+IR C。Um1a+IauR K K K 根据各调节器的给定与反馈值计算有关的反馈系数: 。 转速反馈系数 Unm n 电流反馈系数 im 两个给定电压的最大值矿mm和Uim由设计者选定
双闭环调速系统在稳态工作中,当两个调节器都不饱和时,各变量之间有下列 • 转速反馈电压 电流反馈电压 根据各调节器的给定与反馈值计算有关的反馈系数: • 转速反馈系数 • 电流反馈系数 • 两个给定电压的最大值U* nm和U* im由设计者选定。 2.各变量的稳态工作点和稳态参数计算 0 * Un = Un =n =n i i d dL U = U = I = I * s e n dL s e d s d c K C U I R K C n I R K U U + = + = = / * 0 n U nm = dm im I U =