Different Laplace-Beltrami operators Cotangent Laplacian. the movement in the normal direction is true. 。Uniform Laplacian move each vertex to the barycenter of its one-ring neighbors. smooths the mesh geometry and a tangential relaxation of the triangulation. Input Uniform Cotangent
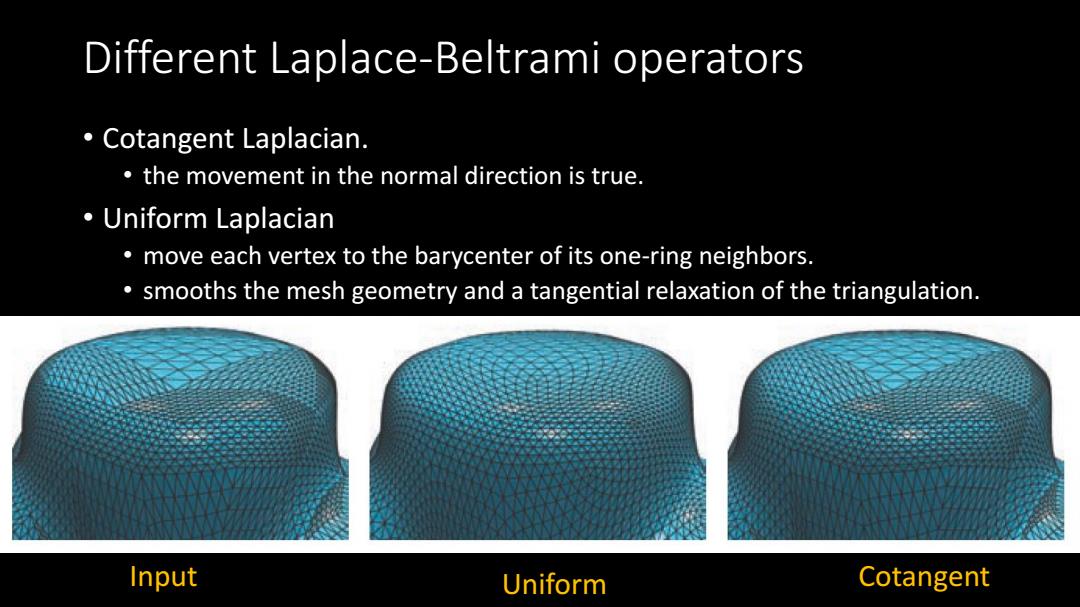
Different Laplace-Beltrami operators • Cotangent Laplacian. • the movement in the normal direction is true. • Uniform Laplacian • move each vertex to the barycenter of its one-ring neighbors. • smooths the mesh geometry and a tangential relaxation of the triangulation. Input Uniform Cotangent

Fairing ·Goal:compute shapes that are as smooth as possible ·Steady-states of the flow: ·Lx=0 ·Lkx=0 Figure 4.8.The blue region is determined by minimizing a fairness functional: membrane surface (Ax =0,left),thin-plate surface (A2x =0,center),and minimum variation surface(A3x=0,right).The order k of the Euler-Lagrange equation Ax=0 determines the maximum smoothness Ck-1at the boundary. (Image taken from [Botsch and Kobbelt 04a].C2004 ACM,Inc.Included here by permission.)
Fairing • Goal: compute shapes that are as smooth as possible • Steady-states of the flow: • 𝐿𝒙 = 0 • 𝐿 𝑘𝒙 = 0 • …
Gaussian Image Denoising The Gaussian filter for an image pixel I(p),at coordinate p (x,y) is defined as: 1o-元∑kp-ga qEn(p) 1.(p):neighborhood of p. 2.W:position similarity between p and g,Gaussian function with standard deviations os 3.Kp is the normalization term,the summation of weights
Gaussian Image Denoising • The Gaussian filter for an image pixel 𝐼(𝒑), at coordinate 𝒑 = (𝑥, 𝑦), is defined as: 𝐼 𝒑 ⟵ 1 𝐾𝒑 𝒒∈Ω(𝒑) 𝑊𝑠 𝒑 − 𝒒 𝐼(𝒒) 1. Ω 𝒑 : neighborhood of 𝒑. 2. 𝑊𝑠 : position similarity between 𝒑 and 𝒒, Gaussian function with standard deviations 𝜎𝑠 3. 𝐾𝒑 is the normalization term, the summation of weights
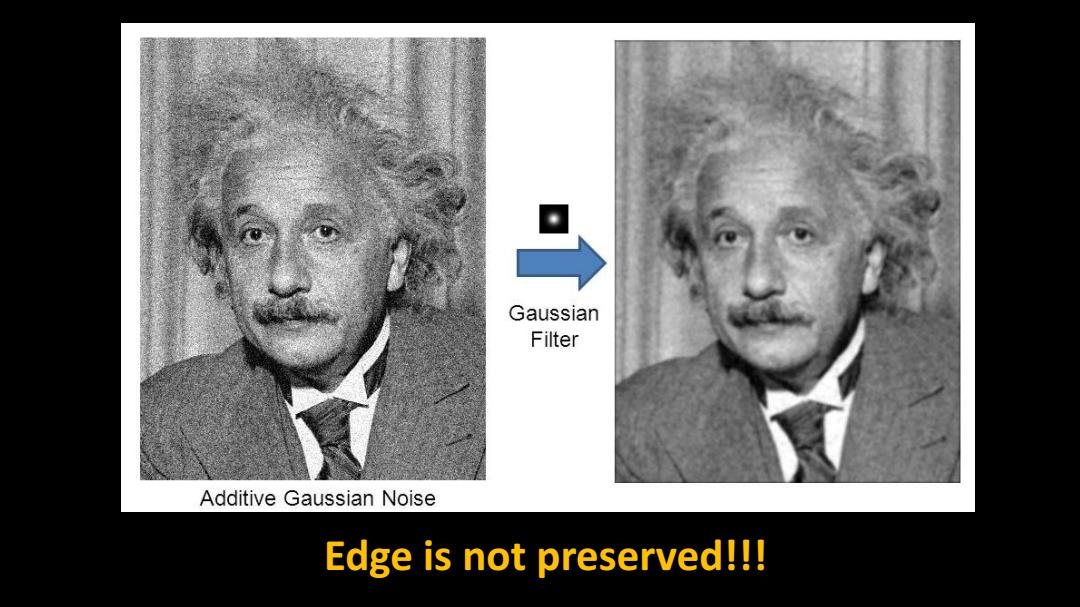
Gaussian Filter Additive Gaussian Noise Edge is not preserved!!!
Edge is not preserved!!!
Bilateral Image Denoising The bilateral filter for an image pixel I(p),at coordinate p =(x,y),is defined as: -云%w-aw-1aa qEn(p) 1.(p):neighborhood of p. 2.Ws and W:monotonically decreasing weighting functions and often be Gaussian functions,with standard deviations os and or. 3.W:position similarity between p and q. 4.W:color similarity between p and q. 5.Kp is the normalization term,the summation of weights
Bilateral Image Denoising • The bilateral filter for an image pixel 𝐼(𝒑), at coordinate 𝒑 = (𝑥, 𝑦), is defined as: 𝐼 𝒑 ⟵ 1 𝐾𝒑 𝒒∈Ω(𝒑) 𝑊𝑠 𝒑 − 𝒒 𝑊𝑟 𝐼 𝒑 − 𝐼 𝒒 𝐼(𝒒) 1. Ω 𝒑 : neighborhood of 𝒑. 2. 𝑊𝑠 and 𝑊𝑟 : monotonically decreasing weighting functions and often be Gaussian functions, with standard deviations 𝜎𝑠 and 𝜎𝑟 . 3. 𝑊𝑠 : position similarity between 𝒑 and 𝒒. 4. 𝑊𝑟 : color similarity between 𝒑 and 𝒒. 5. 𝐾𝒑 is the normalization term, the summation of weights