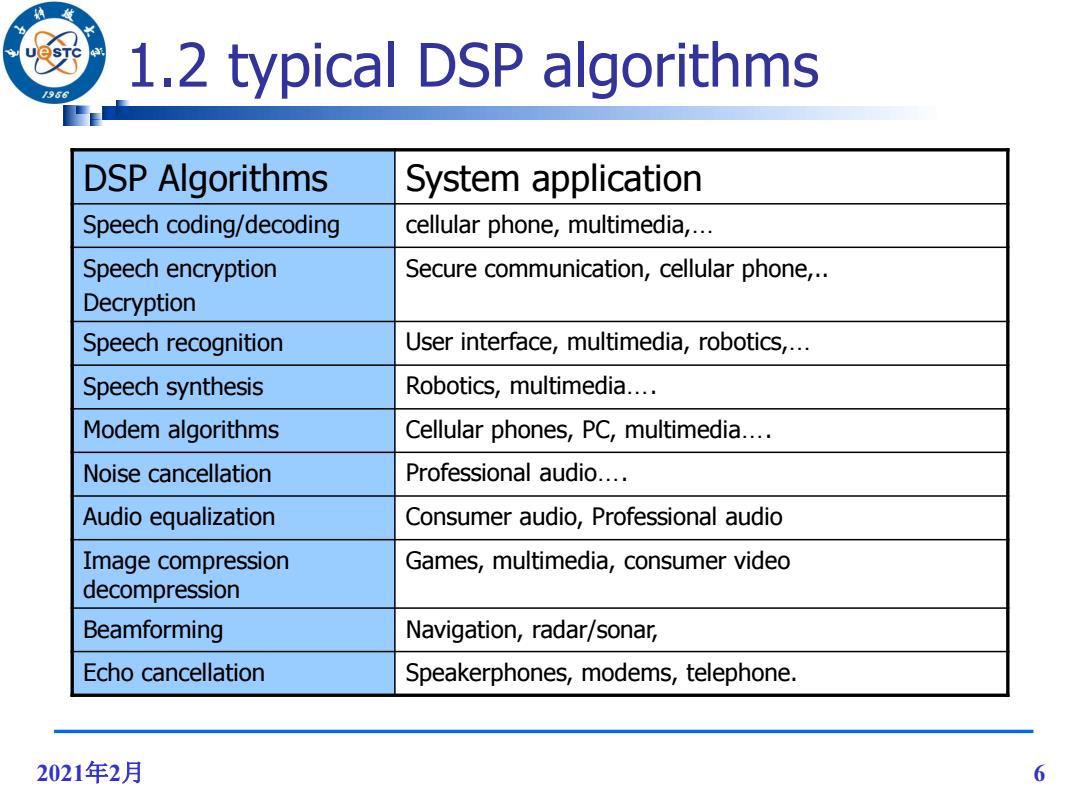
1.2 typical DSP algorithms /966 DSP Algorithms System application Speech coding/decoding cellular phone,multimedia,... Speech encryption Secure communication,cellular phone,.. Decryption Speech recognition User interface,multimedia,robotics,... Speech synthesis Robotics,multimedia.... Modem algorithms Cellular phones,PC,multimedia.... Noise cancellation Professional audio.... Audio equalization Consumer audio,Professional audio Image compression Games,multimedia,consumer video decompression Beamforming Navigation,radar/sonar, Echo cancellation Speakerphones,modems,telephone. 2021年2月 6
2021年2月 6 1.2 typical DSP algorithms DSP Algorithms System application Speech coding/decoding cellular phone, multimedia,… Speech encryption Decryption Secure communication, cellular phone,.. Speech recognition User interface, multimedia, robotics,… Speech synthesis Robotics, multimedia…. Modem algorithms Cellular phones, PC, multimedia…. Noise cancellation Professional audio…. Audio equalization Consumer audio, Professional audio Image compression decompression Games, multimedia, consumer video Beamforming Navigation, radar/sonar, Echo cancellation Speakerphones, modems, telephone
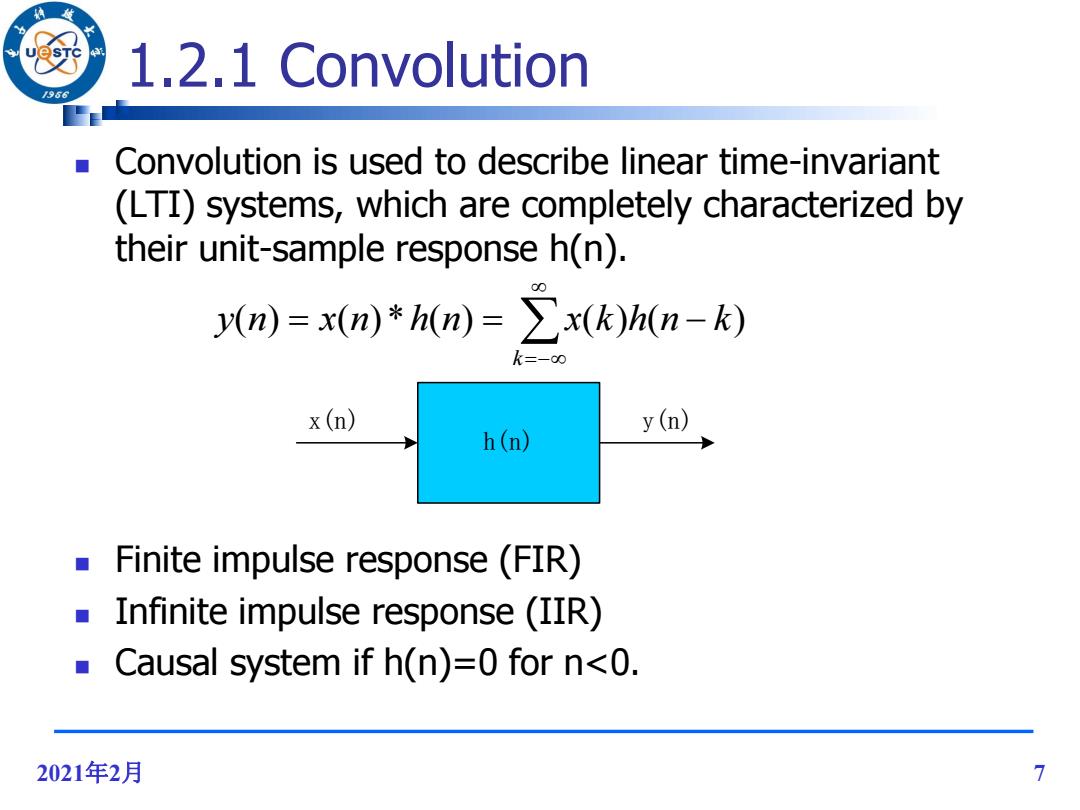
1.2.1 Convolution /96 Convolution is used to describe linear time-invariant (LTI)systems,which are completely characterized by their unit-sample response h(n). y(n)=x(n)h(n)=>x(k)h(n-k) k=-0 x (n) y(n) h(n) Finite impulse response(FIR) Infinite impulse response (IIR) Causal system if h(n)=0 for n<0. 2021年2月 7
2021年2月 7 1.2.1 Convolution Convolution is used to describe linear time-invariant (LTI) systems, which are completely characterized by their unit-sample response h(n). Finite impulse response (FIR) Infinite impulse response (IIR) Causal system if h(n)=0 for n<0. k y(n) x(n)*h(n) x(k)h(n k) h(n) x(n) y(n)
1.2.2 Correlation /96 Correlation is widely used in communication and random signal processing y(n)=a(k)x(n+k)=a(-n)*a(n) 2021年2月 8
2021年2月 8 1.2.2 Correlation Correlation is widely used in communication and random signal processing. ( ) ( ) ( ) ( )* ( ) k y n a k x n k a n a n
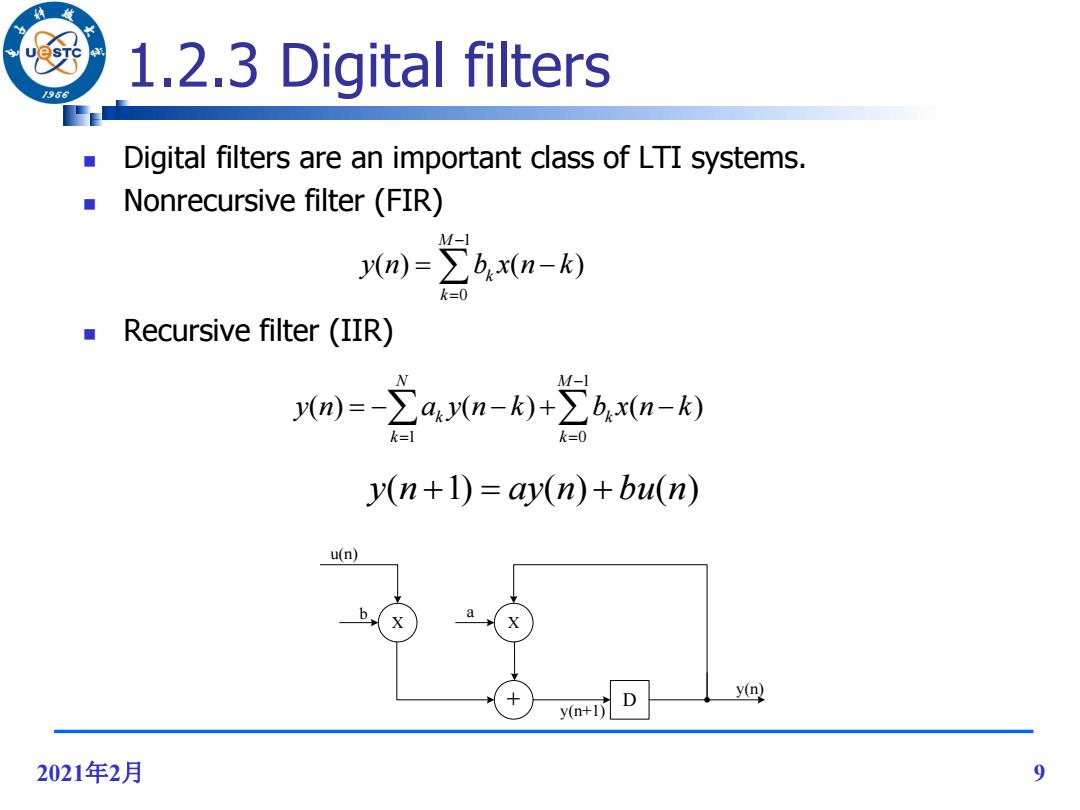
1.2.3 Digital filters /966 Digital filters are an important class of LTI systems. Nonrecursive filter(FIR) M-1 y(m)=∑bx(n-k) k=0 Recursive filter(IIR) M-l 0m)=-2a0n-k)+2b,an-k) k=0 y(n+1)=ay(n)+bu(n) u(n) a y(n) y(n+) D 2021年2月 9
2021年2月 9 1.2.3 Digital filters Digital filters are an important class of LTI systems. Nonrecursive filter (FIR) Recursive filter (IIR) 1 1 0 ( ) ( ) ( ) N M k k k k y n a y n k b x n k 1 0 ( ) ( ) M k k y n b x n k y(n 1) ay(n) bu(n) X + D X y(n) u(n) b a y(n+1)
1.2.4 Adaptive filters /96 ■ Adaptive filter predict one random process y(n)}from observations of another random process {x(n)}using linear models. The coefficients in adaptive digital filters are updated at each iteration. Adaptive filters usually consist of a general filter block and coefficient update block. 2021年2月 10
2021年2月 10 1.2.4 Adaptive filters Adaptive filter predict one random process {y(n)} from observations of another random process {x(n)} using linear models. The coefficients in adaptive digital filters are updated at each iteration. Adaptive filters usually consist of a general filter block and coefficient update block