亲藤火学 电气工程学院运动控制系统 Xinjiang University 4.1.2直流PW小M可递直流调速系统转速反向的过液过程 b点→c点d 从零反向上升到允 n a点 → b点 许的制动电流-Idm Ia从正向I降低为零 c点→d点 回馈制动状态 a(Te) /dm la(Te) 转速将减速到0 在点稳定工作 d点→e点 电枢电流与负载 反向起动状态 电流-l相等 转速要超调 转速环退饱和
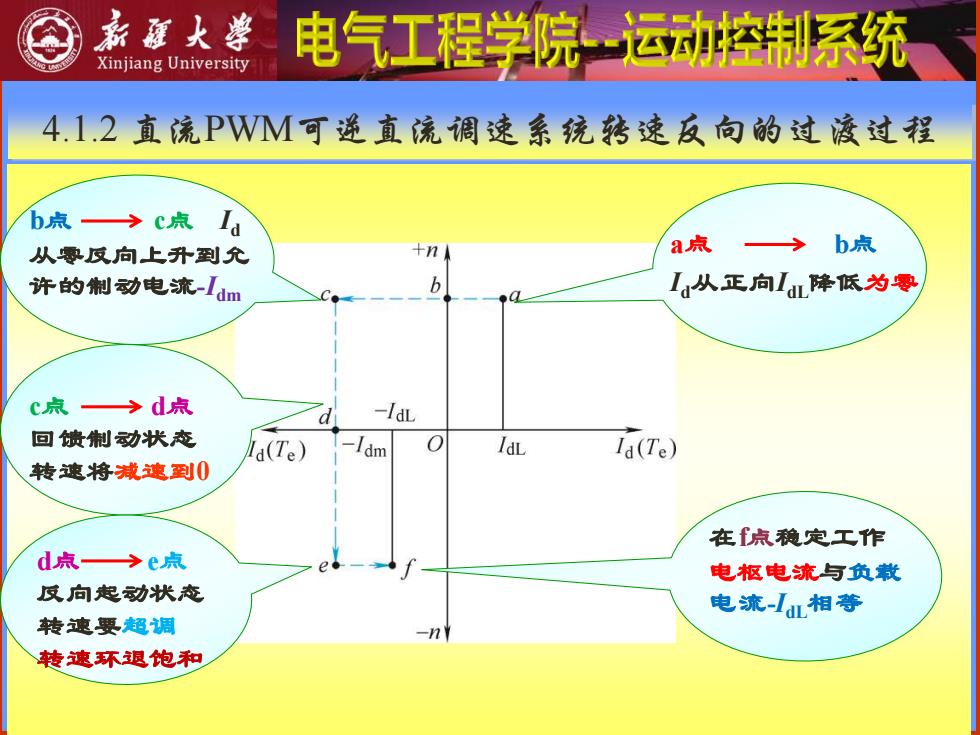
4.1.2 直流PWM可逆直流调速系统转速反向的过渡过程 在f点稳定工作 电枢电流与负载 电流-IdL相等 c点 d点 回馈制动状态 转速将减速到0 b点 c点 Id 从零反向上升到允 许的制动电流-Idm d点 e点 反向起动状态 转速要超调 转速环退饱和 a点 b点 Id从正向IdL降低为零
嘉红火学 电气工程学院运动控制系统 Xinjiang University 4.1.3直流PWM功率变换器的能量回馈 滤波大电容 放电电阻 Ro VT VD VT? 本本本 R VD; 不 Q H型桥 M 式PWM VT2 变换器 不本本 VD2 VT4[ 木VD4 整流器 Ue PWM控制器
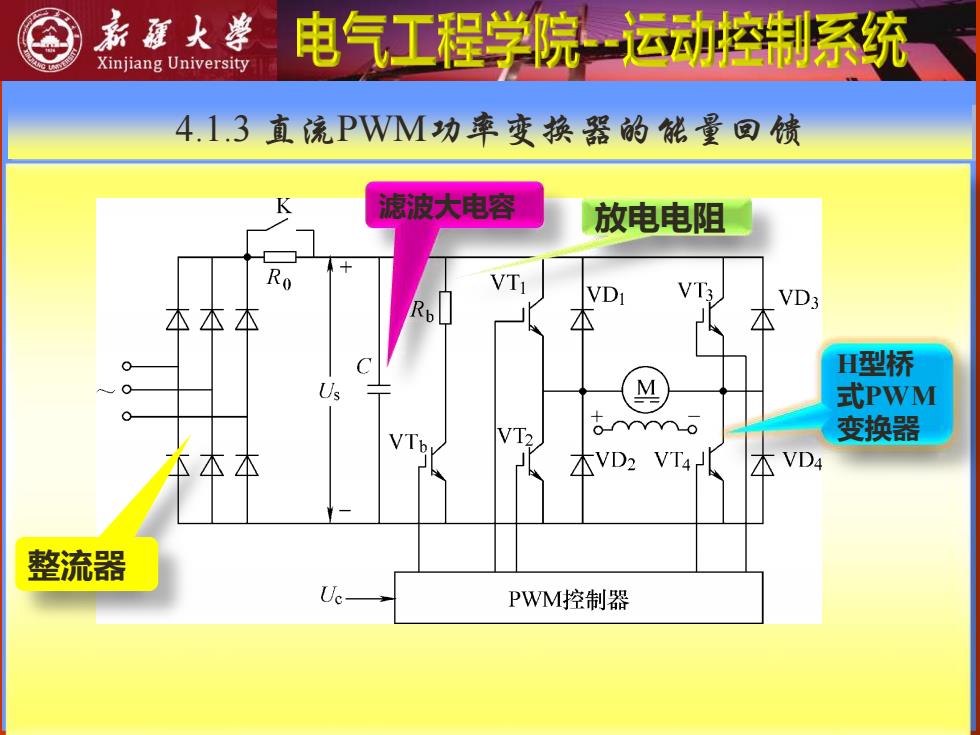
4.1.3 直流PWM功率变换器的能量回馈 整流器 滤波大电容 放电电阻 H型桥 式PWM 变换器

新庭火学 电气工程学院运动控制系统 Xinjiang University 二极管整流器导电的 单向性,电能不能送 Ro VT VD VT 本本本 R 回交流电网,只能向 滤波电容充电,使电 容两端电压升高,称 o 作泵升电压 不不不 本VD2VT4 本VD4 PWM控制器 泵升电压高于规定值时 开关器件VT导通 制动状态时 制动过程中多余的动能以铜 直流PWM功率变换器把机械 耗的形式消耗在放电 能变为电能回馈到直流侧 电阻R中
制动状态时 直流PWM功率变换器把机械 能变为电能回馈到直流侧 泵升电压高于规定值时 开关器件VTb导通 制动过程中多余的动能以铜 耗的形式消耗在放电 电阻 中 二极管整流器导电的 单向性,电能不能送 回交流电网,只能向 滤波电容充电,使电 容两端电压升高,称 作泵升电压 Rb

系庭大学 电气工程学院运动控制系统 Xinjiang University 突加交流电源时,大电容量滤波电容C相当于短路 会产生很大的充电电流,容易损坏整流二极管 接触器触点K把电 因此,在整流器和滤波电容之间串入限流电阻 阻短路 以免在运行中造 成附加损耗 VD3 本本不 Q Us M 本本本 VD2 VT4 本VD4 PWM控制器
突加交流电源时,大电容量滤波电容C相当于短路 会产生很大的充电电流,容易损坏整流二极管 接触器触点K把电 因此,在整流器和滤波电容之间串入限流电阻 阻短路 以免在运行中造 成附加损耗

新庭火学 电气工程学院运动控制系统 Xinjiang University 三相交流电源经不可控 整流器变换为电压恒定 的直流电源 再经过直流PWM变换器 得到可调的直流电压, Ro VTy 给直流电动机供电 VD 本本本 R VD: C Us VTb 本本本 木VD2VT4〔 ND4 Ue PWM控制器
三相交流电源经不可控 整流器变换为电压恒定 的直流电源 再经过直流PWM变换器 得到可调的直流电压, 给直流电动机供电