系庭大学 电气工程学院运动控制系统 Xinjiang University Uak Ug4 VD Ua=Ug4 =-U82=-U83 VTI VT. VD: VD 在一个开关周期内 Ug21 Ug3 >子,的平均值为正,电 UABI 动机正转,反之反转 +U = 2平均输出电压为零,停止。 +Us o 3 VT 不VD3 VD 0 Ug M 1d2 VD2不 VD
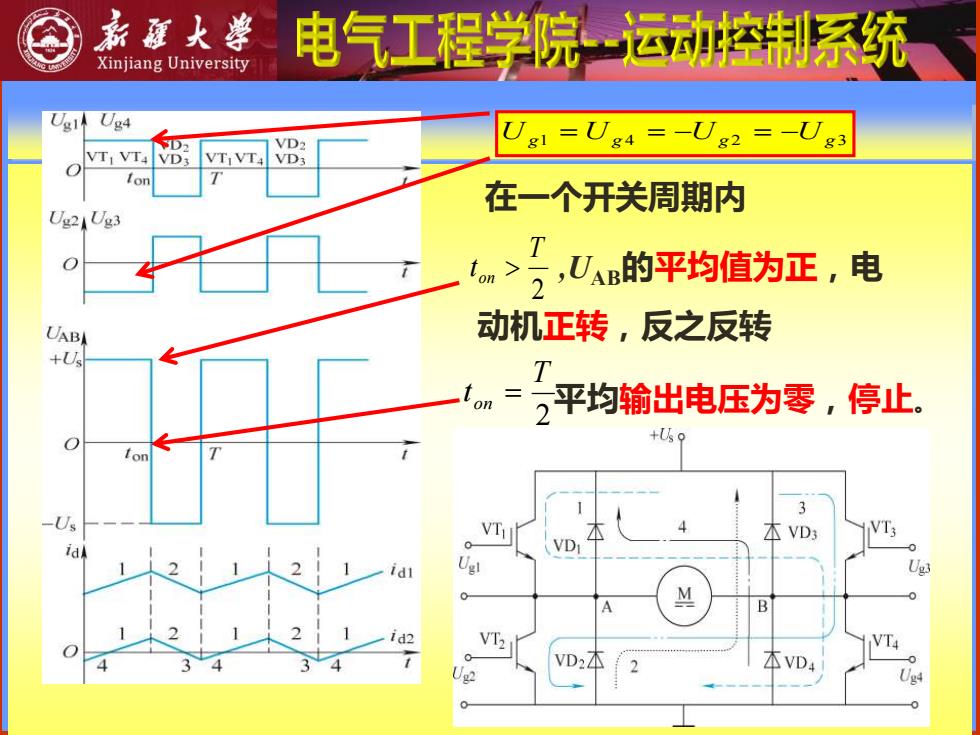
Ug1 = Ug 4 = −Ug 2 = −Ug3 平均输出电压为零,停止。 2 T t on = 2 T t on ,UAB的平均值为正,电 动机正转,反之反转 在一个开关周期内
素面火学 Xinjiang University 电气工程学院运动控制系统 电流波形存在两种情况 电动机负载较重 负载电流i大 电流仍维持正方向 电动机工作在第I象限的电动状态。 电动机负载很轻平均电流小二极管终止续流,反向开关器件导通 电枢电流反向,电动机处于制动状态 i电流中的线段3和4是工作在第Ⅱ象限的制动状态
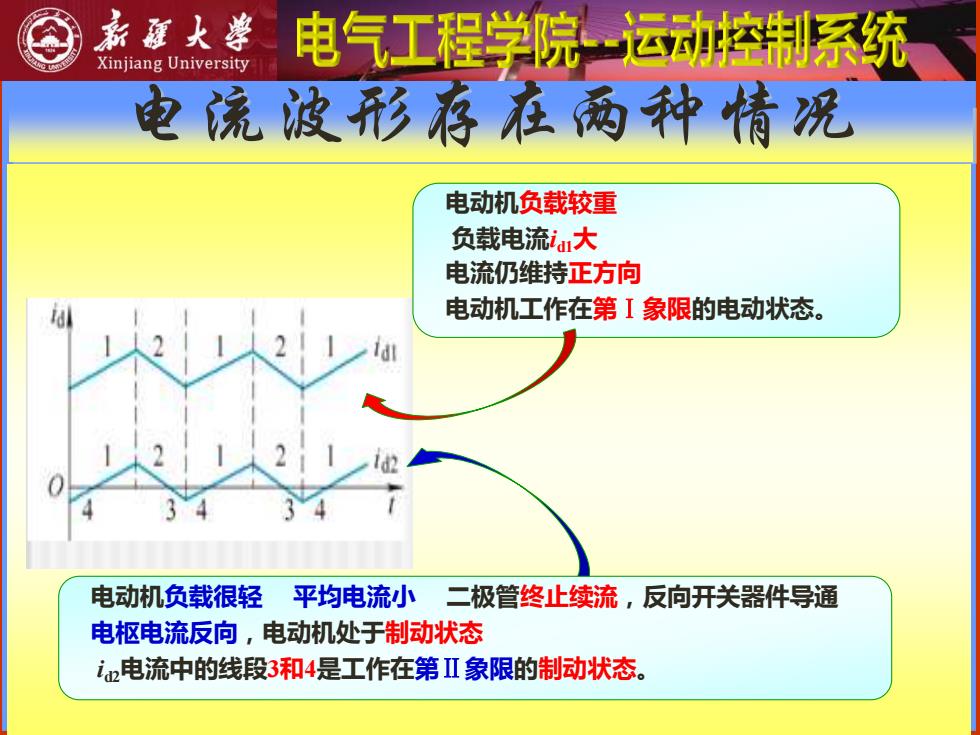
电流波形存在两种情况 电动机负载较重 负载电流id1大 电流仍维持正方向 电动机工作在第Ⅰ象限的电动状态。 电动机负载很轻 平均电流小 二极管终止续流,反向开关器件导通 电枢电流反向,电动机处于制动状态 id2电流中的线段3和4是工作在第Ⅱ象限的制动状态
系庭大学 电气工程学院运动控制系统 Xinjiang University 双极式控制可逆PWM变换器的输出平均电压为 T-tonU 2 on -1U (4-1) 占空比柳和电压系数的关系为 =2p-1 (4-2) 1.p>1/2 2.p<1/2 3.p=1/2 为正 为负 2=0 电动机正转 电动机反转 电动机停止
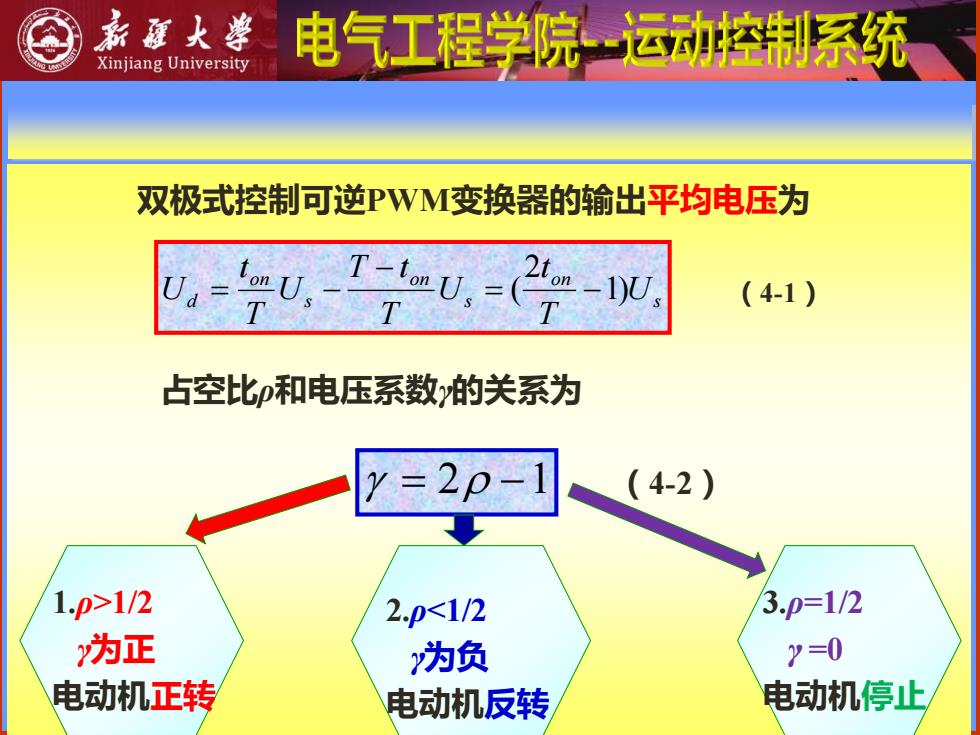
s on s on s on d U T t U T T t U T t U 1) 2 = ( − − = − = 2 −1 (4-2) 双极式控制可逆PWM变换器的输出平均电压为 (4-1) 占空比ρ和电压系数γ的关系为 1.ρ>1/2 γ为正 电动机正转 2.ρ<1/2 γ为负 电动机反转 3.ρ=1/2 γ =0 电动机停止

亲源火学 电气工程学院运动控制系统 Xinjiang University 双极式控制的桥式可逆PWM变换器 1.电流一定连续 5.低速时每个开关器 件的驱动脉冲仍较宽 保证器件的可靠导通 2.电动机在四 优点 象限运行 4.低速平稳性好 3.电动机停止时有 系统的调速范围大 微振电流 能消除静磨擦死区
双极式控制的桥式可逆PWM变换器 优点 1.电流一定连续 2.电动机在四 象限运行 3.电动机停止时有 微振电流 能消除静磨擦死区 4.低速平稳性好 系统的调速范围大 5.低速时每个开关器 件的驱动脉冲仍较宽 保证器件的可靠导通
亲题火学 电气工程学院运动控制系统 Xinjiang University 双极式控制方式的不是之处 1. 四个开关器 缺点 件可能都处于 +5 开关状态 开关损耗大 3 3.为防止桥臂 木VD房 0- VD 0 直通 Ug 在上、下桥臂 M B 2.切换时可能 的驱动脉冲之 发生上、下桥 间需设置 VD4 臂直通的事故 逻辑延时
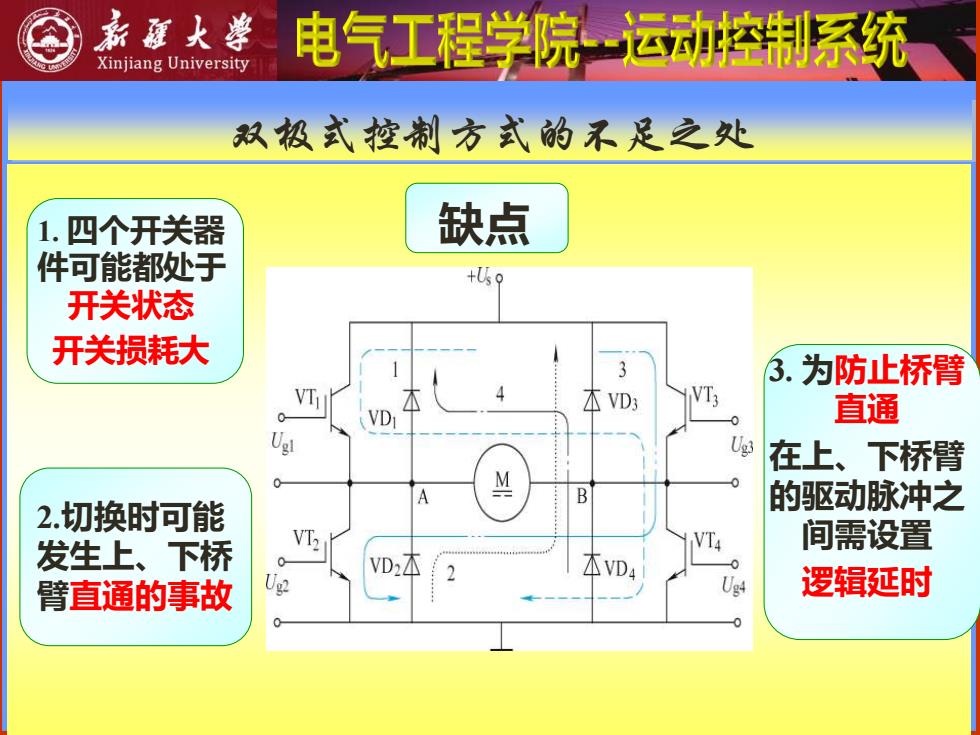
双极式控制方式的不足之处 1. 四个开关器 缺点 件可能都处于 开关状态 开关损耗大 2.切换时可能 发生上、下桥 臂直通的事故 3. 为防止桥臂 直通 在上、下桥臂 的驱动脉冲之 间需设置 逻辑延时