研究背景 Input Process Output IMU:Local motion detection Artificial intelligence module Engine and brake control 、 Environment recognition Speeding up or down GPS:location and navigation Driving decision making Adaptive cruise control Pre-crash avoidance Environment perception Mapping module Steering control -Macro-scale road map Lane keeping or changing Lidar:3-D HD mapping Micro-scale road structure Overtaking (dynamic/static object features) Merging Radar:motion detection Machine vision module Route planning -Visual object recognition -Traffic jam avoidance Camera:object detection and -Mobility and motion prediction Construction detour visual presentation Lane marking Gas refuel or electric charging 自动驾驶系统和辅助技术 中包特茶生黑大
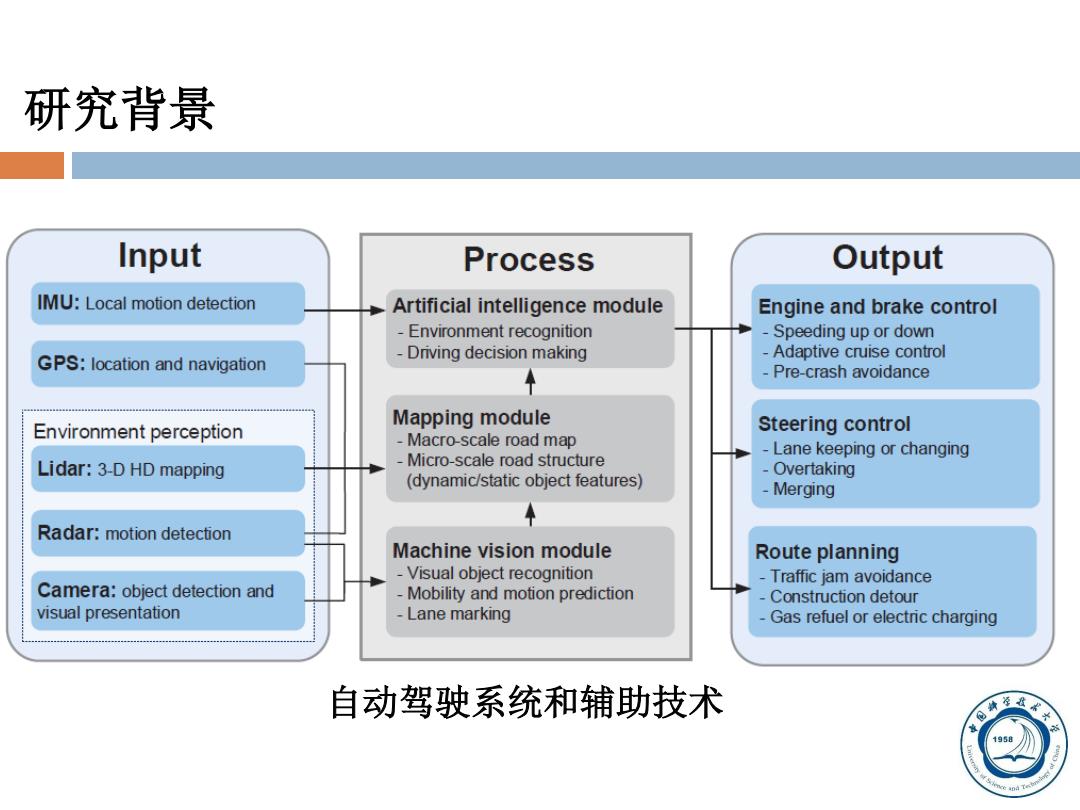
研究背景 自动驾驶系统和辅助技术

研究背景 >车载传感技术潜在障碍 。 受探测范围的限制 ·自动驾驶性能高度依赖于数据集 ·使用户面临网络安全攻击的风险 ·可能会导致失业或政治问题 ⊙特茶送术大
研究背景 ➢ 车载传感技术潜在障碍 • 受探测范围的限制 • 自动驾驶性能高度依赖于数据集 • 使用户面临网络安全攻击的风险 • 可能会导致失业或政治问题