
运动控制系统实验指导书 张厚升 触发电路及晶 闸管主回响 流电流表 电源控制屏 T 电压 直流电机 励磁申泥 V 转速显示 飞轮惯量G2的测定 及输用 TG 调速系统控制单 触发电路和品管主回 脉冲移相控制 G给定 UR 张冲放大电路 电力拖动系统的运动方程式为 M-M=(GD2/375)×dm1d 式中 M-电动机的电磁转矩,单位为N.m M一负载转矩,空载时即为空载转矩MK,单位为N.m n一电机转速,单位为r/min: 突然断电,电机空载自由停车时,运动方程式为 MK=(-GD2 /375)xdnldt 故 GD2 =375Mk/dnl dr 式中GD2的单位为N.m2. MK可由空载功率Pk(单位为W)求出 MK=9.55PK/n Px Ualk-1R dn做可由自由停车时所得曲线n=f(心求得,其实验线路如上图所示。 电动机M加额定励磁。 >
运动控制系统 实验指导书 张厚升 7 U V W V A 直流电流表 直流电压表 M TG 飞轮惯量GD2的测定 转速显示 及输出 直流电机 励磁电源 电源控制屏 G给定 Ug 调速系统控制单元 低压单元 脉冲移相控制 Uct 脉冲放大电路 触发电路和晶闸管主回路 触发电路及晶 闸管主回响 平波电抗 器 平波电抗 器 电力拖动系统的运动方程式为 M ML (GD / 375) dn / dt 2 − = × 式中 M—电动机的电磁转矩,单位为 N.m; ML 负载转矩,空载时即为空载转矩 MK,单位为 N.m; n 电机转速,单位为 r/min; 突然断电,电机空载自由停车时,运动方程式为 MK ( GD / 375) dn / dt 2 = − × 故 GD 375MK / dn / dt 2 = 式中 GD2 的单位为 N.m2 . MK 可由空载功率 Pk(单位为 W)求出。 MK = 9.55PK / n PK UaIK I K R2 = − dn/dt 可由自由停车时所得曲线 n= f (t)求得,其实验线路如上图所示。 电动机 M 加额定励磁
运动控制系统实验指导书 张厚升 低压单元的给定电位器RP,逆时针调到底,使Ut=O。 合上主电路电源开关,转速计TG的转速输出与示波器相连,TG置于”ON”。调 节U,将电机空载起动至稳定转速后,测取电枢电压Ua和电流K,然后突然新开U, 用记忆示波器拍摄曲线,即可求取某一转速时的Mk和dn。由于空载转矩不是常数, 可以转速n为基准选择若千个点(如1500rmin,1000rmin),测出相应的Mk和dn/t, 以求取GD的平均值。 电机为1500rmin。 Ud (v)Ik (A) dn/dt Pk Mk GD 电机为1000rmin。 Ud (v)Ik (A) dn/dt GD2 4.主电路电磁时间常数Td的测定 根据己经测出的回路电阻和电感可计算出电磁时间常数: Td=L/R 5.电动机电势常数C。和转矩常数CM的测定 按上图连线,将电动机加额定励磁,调节给定,使Uc=0,闭合主电路电源,调节给 定Ug,使电机空载运行(如1000rm)记录Ud。调节给定Ug,改变相应的n(如1400rm 记录相应的数值。刚可由下式算出Ce。实验结束后断开主电源。 C。=K:d=(Ud2-Ua1)/nznl Ce的单位为V(r/min) 转矩常数(额定磁通时)CM的单位为N.mlA,可由Ce求出 Cw=9.55C。 6.系统机电时间常数TM的测定 系统的机电时间常数可由下式计算 Tm=(GD2x R)/375CeLM 由于Tm>Td,也可以近似地把系统看成是一阶惯性环节,即 n=K/(1+TmS)xUd 当电枢突加给定电压时,转速n将按指数规律上升,当n到达63.2%稳态值时, 所经过的时间即为拖动系统的机电时间常数。 按上图接线,使U=0,按下主电源控制开关,调节给定,使Uct增加,使电机空 载运行1000rm。然后保持Uct不变,突然切断Uct,待电机完全停止后,突然合上Uct 用数字示波器记录转速N过渡过程曲线,即可由此曲线确定系统机电时间常数。 7.测速发电机特性Urc=f)的测定 8
运动控制系统 实验指导书 张厚升 8 低压单元的给定电位器 RP1 逆时针调到底,使 Uct=0。 合上主电路电源开关,转速计 TG 的转速输出与示波器相连,TG 置于”ON”。调 节 Uct,将电机空载起动至稳定转速后,测取电枢电压 Ud 和电流 IK,然后突然断开 Uct, 用记忆示波器拍摄曲线,即可求取某一转速时的 MK 和 dn/dt。由于空载转矩不是常数, 可以转速 n 为基准选择若干个点(如 1500r/min,1000r/min),测出相应的 MK 和 dn/dt, 以求取 GD2的平均值。 电机为 1500r/min。 Ud(v) IK(A) dn/dt PK MK GD2 电机为 1000r/min。 Ud(v) IK(A) dn/dt PK MK GD2 4.主电路电磁时间常数 Td 的测定 根据已经测出的回路电阻和电感可计算出电磁时间常数。 Td=L/R 5.电动机电势常数 Ce和转矩常数 CM的测定 按上图连线,将电动机加额定励磁,调节给定,使 Uct=0,闭合主电路电源,调节给 定 Ug,使电机空载运行(如 1000r/m)记录 Ud。调节给定 Ug,改变相应的 n(如 1400r/m) 记录相应的数值。刚可由下式算出 Ce。实验结束后断开主电源。 Ce=KeΦ=(Ud2-Ud1)/(n2-n1) Ce 的单位为 V/(r/min) 转矩常数(额定磁通时)CM 的单位为 N.m/A,可由 Ce 求出 CM=9.55Ce 6.系统机电时间常数 TM的测定 系统的机电时间常数可由下式计算 Tm (GD R)/ 375CeLM 2 = × 由于 Tm>>Td,也可以近似地把系统看成是一阶惯性环节,即 n = K /(1+TmS)×Ud 当电枢突加给定电压时,转速 n 将按指数规律上升,当 n 到达 63.2%稳态值时, 所经过的时间即为拖动系统的机电时间常数。 按上图接线,使 Uct=0,按下主电源控制开关,调节给定,使 Uct 增加,使电机空 载运行 1000r/m。然后保持 Uct 不变,突然切断 Uct,待电机完全停止后,突然合上 Uct 用数字示波器记录转速 Nr 过渡过程曲线,即可由此曲线确定系统机电时间常数。 7.测速发电机特性 UTG=f(n)的测定
运动控制系统实验指导书 张厚升 实验线路如上图所示。 电动机加额定励磁,闭合主电源,逐渐增加触发电路的控制电压U,分别读取对应 的UTG,n的数值若干组,即可描绘出特性曲线Ue=f)。 n (r/min) UTG (V) 七.实验报告 1。作出实验所得各种曲线,计算有关参数。 2.由Ks=fU特性,分析品闸管装置的非线性现象
运动控制系统 实验指导书 张厚升 9 实验线路如上图所示。 电动机加额定励磁,闭合主电源,逐渐增加触发电路的控制电压 Uct,分别读取对应 的 UTG ,n 的数值若干组,即可描绘出特性曲线 UTG=f(n)。 n(r/min) UTG(V) 七. 实验报告 1.作出实验所得各种曲线,计算有关参数。 2.由 Ks=f(Uct)特性,分析晶闸管装置的非线性现象
运动控制系统实验指导书 张厚升 实验二不可逆单闭环直流调速系统静特性的研究 一.实验目的 1.研究晶闸管直流电动机调速系统在反馈控制下的工作。 2.研究直流调速系统中速度调节器ASR的工作及其对系统静特性的影响。 3.学习反馈控制系统的调试技术。 二.预习要求 1.了解速度调节器在比例工作与比例一积分工作时的输入一输出特性。 2.弄清不可逆单闭环直流调速系统的工作原理。 三.实验线路及原理 见图2-1. 1)电源控制屏位于NMCL-32MEL-002T等 2)L平波电抗器位于NMCL-331 3)Rd可调电阻位于NMEL-03/4或NMCL-03等 4)G给定(Ug)位于NMCL-31或NMCL-31A或SMCL-01调速系统控制单中 5)Uct位于NMCL-33或NMCL-33F中 6)触发电路及晶闸管主电路位于NMCL33或NMCL-33F中 7)ACR,ASR位于NMCL-18中 8)TG指光电编码器与电机导轨同轴连接 9)转速显示及输出位于电机导轨上或NMEL-13AWF/C中 10)直流电机励磁电源位于NMCL-32或NMEL-18/2中 11)负载用M01电机或测功机(NMEL-13A) 12)M电机采用M03电机 10
运动控制系统 实验指导书 张厚升 10 实验二 不可逆单闭环直流调速系统静特性的研究 一.实验目的 1.研究晶闸管直流电动机调速系统在反馈控制下的工作。 2.研究直流调速系统中速度调节器 ASR 的工作及其对系统静特性的影响。 3.学习反馈控制系统的调试技术。 二.预习要求 1.了解速度调节器在比例工作与比例—积分工作时的输入—输出特性。 2.弄清不可逆单闭环直流调速系统的工作原理。 三.实验线路及原理 见图 2-1。 1) 电源控制屏位于 NMCL-32/MEL-002T 等 2) L 平波电抗器位于 NMCL-331 3) Rd 可调电阻位于 NMEL-03/4 或 NMCL-03 等 4) G 给定(Ug)位于 NMCL-31 或 NMCL-31A 或 SMCL-01 调速系统控制单中 5) Uct 位于 NMCL-33 或 NMCL-33F 中 6) 触发电路及晶闸管主电路位于 NMCL-33 或 NMCL-33F 中 7) ACR,ASR 位于 NMCL-18 中 8) TG 指光电编码器与电机导轨同轴连接 9) 转速显示及输出位于电机导轨上或 NMEL-13A/F/C 中 10) 直流电机励磁电源位于 NMCL-32 或 NMEL-18/2 中 11) 负载用 M01 电机或测功机(NMEL-13A) 12) M 电机采用 M03 电机
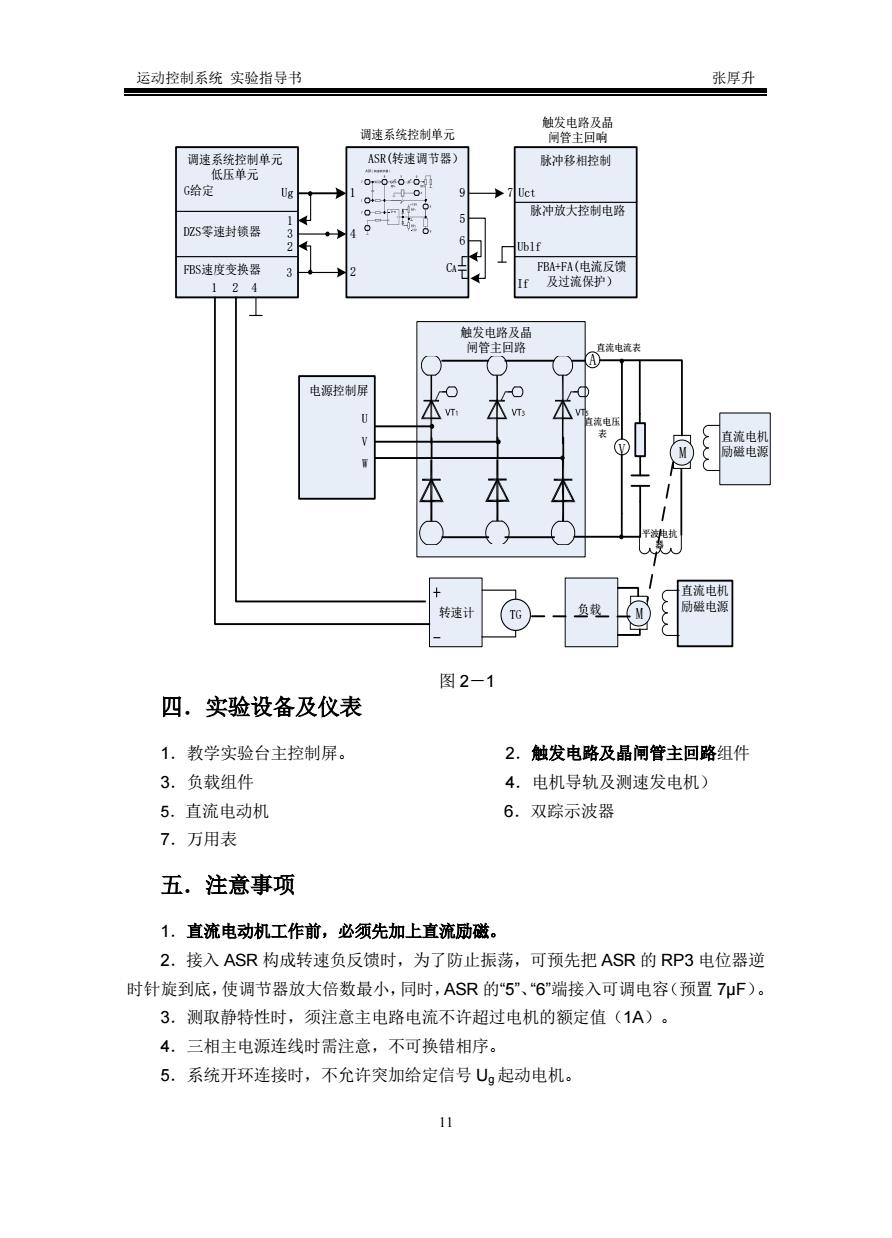
运动控制系统实验指导书 张厚升 调速系统控制单元 界电及品 AS求(转速满节器) 厂脉冲移相控制 给定 199“8 脉冲故大控制电路 DzS零速封领器 B5速度变换器 触发电路及品 电源控制屏 本m 7不 电门 图2-1 四.实验设备及仪表 1.教学实验台主控制屏。 2.触发电路及晶闸管主回路组件 3.负载组件 4.电机导轨及测速发电机) 5.直流电动机 6.双踪示波器 7.万用表 五.注意事项 1.直流电动机工作前,必须先加上直流励磁。 2.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的RP3电位器逆 时针旋到底,使调节器放大倍数最小,同时,ASR的5”、“6"端接入可调电容(预置7μF)。 3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。 4.三相主电源连线时需注意,不可换错相序。 5.系统开环连接时,不允许突加给定信号Ug起动电机
运动控制系统 实验指导书 张厚升 11 U V W V A 直流电流表 直流电压 表 M 直流电机 励磁电源 触发电路及晶 闸管主回路 电源控制屏 平波电抗 器 G给定 Ug ASR(转速调节器) FBS速度变换器 1 2 3 4 1 2 DZS零速封锁器 3 1 2 9 7 4 脉冲移相控制 Uct 脉冲放大控制电路 Ublf FBA+FA(电流反馈 If 及过流保护) 5 6 CA 调速系统控制单元 低压单元 调速系统控制单元 触发电路及晶 闸管主回响 直流电机 励磁电源 转速计 TG 负载 M 图 2-1 四.实验设备及仪表 1.教学实验台主控制屏。 2.触发电路及晶闸管主回路组件 3.负载组件 4.电机导轨及测速发电机) 5.直流电动机 6.双踪示波器 7.万用表 五.注意事项 1.直流电动机工作前,必须先加上直流励磁。 2.接入 ASR 构成转速负反馈时,为了防止振荡,可预先把 ASR 的 RP3 电位器逆 时针旋到底,使调节器放大倍数最小,同时,ASR 的“5”、“6”端接入可调电容(预置 7μF)。 3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。 4.三相主电源连线时需注意,不可换错相序。 5.系统开环连接时,不允许突加给定信号 Ug起动电机