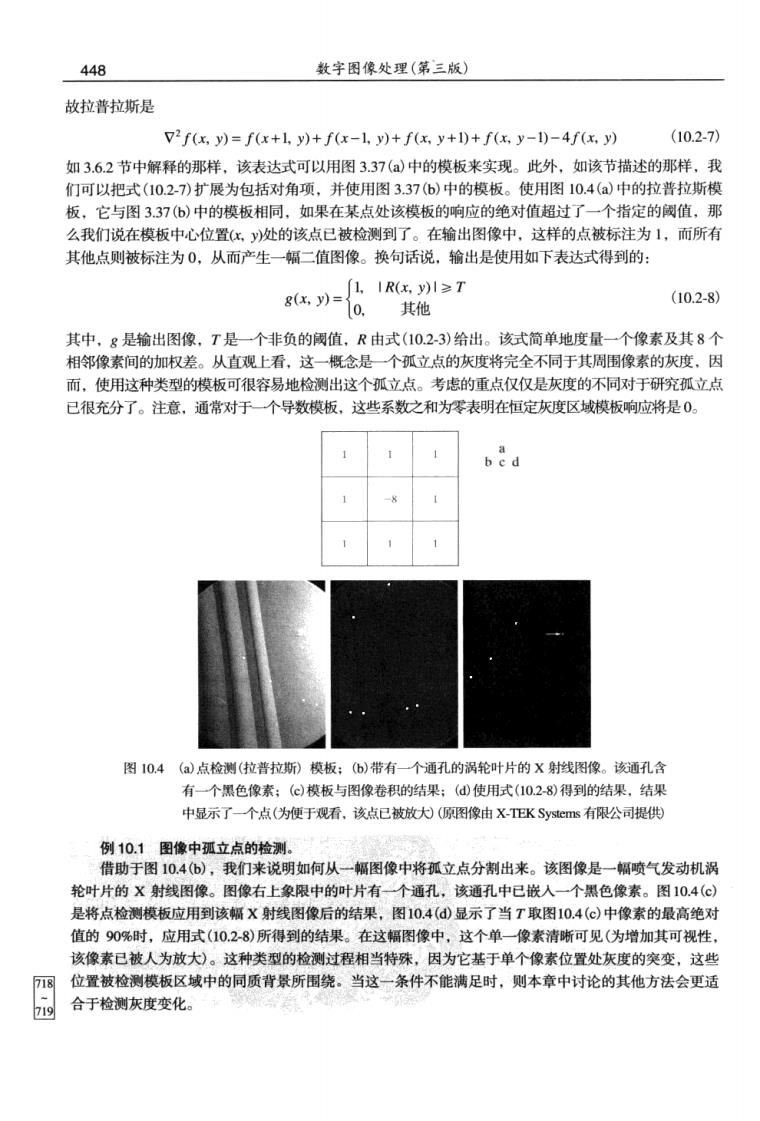
448 数字图像处理(第三版) 故拉普拉斯是 V2f(x.y)=f(x+Ly)+f(x-l.y)+f(x.y+l)+f(x,y-l)-4f(x.y) (10.2-7 如3.6.2节中解释的那样,该表达式可以用图3.37()中的模板来实现。此外,如该节描述的那样,我 们可以把式(10.2-7)扩展为包括对角项,并使用图3.37(6)中的模板。使用图10.4(a)中的拉普拉斯模 板,它与图3,37(6)中的模板相同,如果在某点处该模板的响应的绝对值超过了一个指定的值,那 么我们说在模板中心位置x,y)处的该点已被检测到了。在输出图像中,这样的点被标注为1,而所有 其他点则被标注为0,从而产生一幅二值图像。换句话说,输出是使用如下表达式得到的: 8,功=么1RG1≥7 (10.2-8) 0,其他 其中,g是输出图像,T是一个非负的阀值,R由式(1023)给出。该式简单地度量一个像素及其8个 相邻像素间的加权差。从直观上看,这一概念是一个弧立点的灰度将完全不同于其周围像素的灰度,因 而,使用这种类型的模板可很容易地检测出这个孤立点。考虑的重点仅仅是灰度的不同对于研究孤立点 已很充分了。注意,通常对于一个导数模板,这些系数之和为零表明在恒定灰度区域模板响应将是0。 1 图104(a)点检测(拉普拉斯模板:(6)带有一个通孔的祸轮叶片的X射线图像。该通孔含 有一个里色像素:(c)模板与图像卷积的结果:()使用式(102-8)得到的结果,结果 中显示了一个点(为便于观看.该点已被放力(原图像由XT EKSystems正有限公司提供 例10.1图像中孤立点的检测。 借助于图10.46),我们来说明如何从一幅图像中将孤立点分割出来。该图像是一幅喷气发动机误 轮叶片的X射线图像。图像右上象限中的叶片有一个通孔,该通孔中已嵌入一个黑色像素。图10.4(c) 是将点检测模板应用到该幅X射线图像后的结果,图10,4(d)显示了当T取图10.4(c)中像素的最高绝对 值的90%时,应用式(10.2-8)所得到的结果。在这幅图像中,这个单一像素清晰可见(为增加其可视性】 该像素已被人为放大)。这种类型的检测过程相当特殊,因为它基于单个像素位置处灰度的突变,这些 品合于径浅整城中的同质背景所围绕。当这一条件不能清足时。则本衣中时论的其他方法会更污
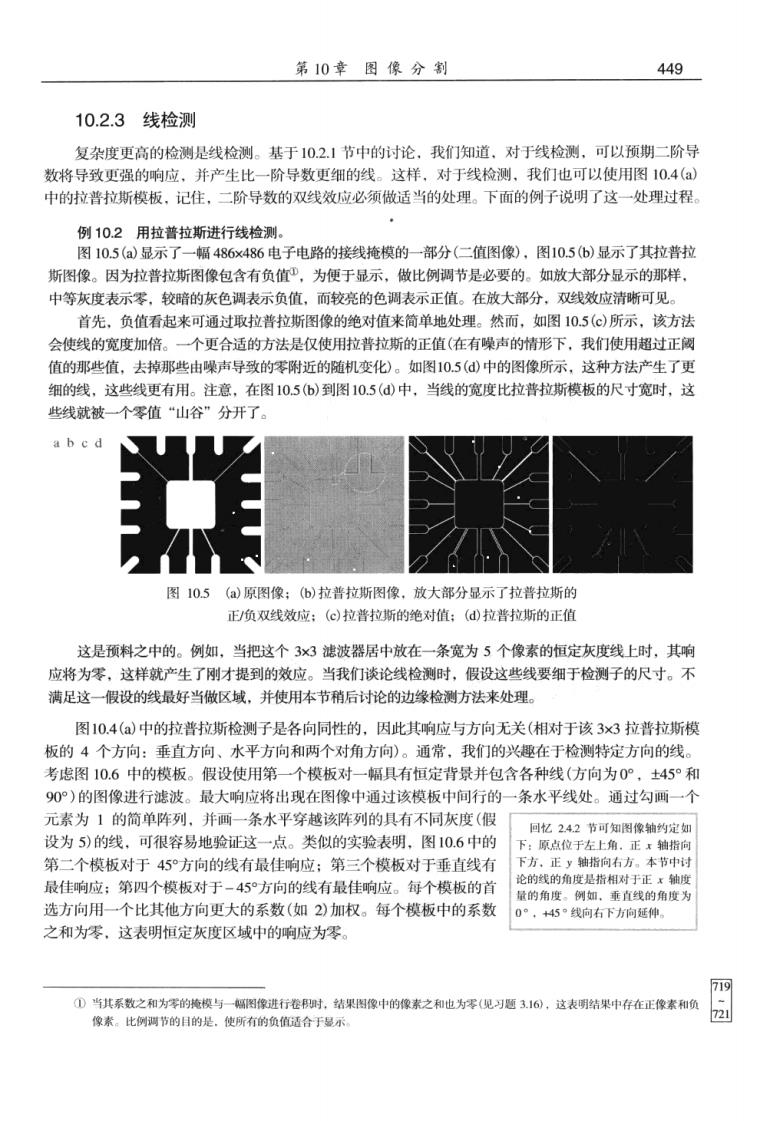
第10章图像分割 449 10.2.3线检测 复杂度更高的检测是线检测。基于10.2.1节中的讨论,我们知道.对于线检测,可以预期二阶号 数将导致更强的响应,并产生比一阶导数更细的线。这样,对于线检测,我们也可以使用图10,4(a) 中的拉普拉斯模板,记住 二阶导数的双线效应必须做适当的处理。下面的例子说明了这一处理过程 例102用拉普拉斯进行线检测 图10.5(a)显示了一幅486x486电子电路的接线掩模的一部分(二值图像),图10.5(b)显示了其拉普拉 斯图像。因为拉普拉斯图像包含有负值,为便于显示,做比例调节是必要的。如放大部分显示的那样, 中等灰度表示零,较暗的灰色调表示负值,而较亮的色调表示正值。在放大部分,双线效应清嘶可见。 首先。负值看起来可通过取拉普拉斯图像的绝对值来简单地处理。然而,如图10.5(⊙)所示,该方法 会使线的宽度加倍。一个更合适的方法是仅使用拉普拉斯的正值(在有噪声的情形下,我们使用超过正圆 值的那些值,去掉那些由噪声导致的零附近的随机变化)。如图10.5(d)中的图像所示,这种方法产生了更 细的线,这些线更有用。注意,在图10.56)到图10.5(d)中,当线的宽度比拉普拉斯模板的尺寸宽时,这 些线就被一个零值“山谷”分开了。 图105(a)原图像:(6)拉善拉斯图像,故大部分显示了拉普拉斯的 正/负双线效应:(c)拉普拉斯的绝对值:(@拉普拉斯的正值 这是预料之中的。例如,当把这个3x3滤波器居中放在一条宽为5个像素的恒定灰度线上时,其响 应将为零,这样就产生了刚才提到的效应。当我们谈论线检测时,假设这些线要细于检测子的尺寸。不 满足这一假设的线最好当做区域,并使用本节稍后讨论的边缘检测方法来处理。 图10.4(a)中的拉普拉斯检测子是各向同性的,因此其响应与方向无关(相对于该3x3拉普拉斯模 板的4个方向:垂直方向、水平方向和两个对角方向)。通常,我们的兴趣在于检测特定方向的线。 考虑图10.6中的模板。假设使用第一个模板对一幅具有恒定背景并包含各种线(方向为0°,45°和 90°)的图像进行滤波。最大响应将出现在图像中通过该模板中间行的一条水平线处。通过勾画一个 元素为1的简单阵列,并画一条水平穿越该阵列的具有不同灰度(假 设为5)的线。可很容易地验证这一点。类似的实验表明。图10.6中的 第二个模板对于45°方向的线有最佳响应第三个模板对于垂直线有 下方正,指向方。本节中 最佳响应;第四个模板对于-45°方向的线有最佳响应。每个模板的首 论的线的角度是指相对于正轴 选方向用一个比其他方向更大的系数(如2)加权。每个模板中的系数 之和为零,这表明恒定灰度区域中的响应为零 ①当其系数之和为零的施模与幅图像进行卷时,结果图像中的像素之和也为零(见习题3.16,这表明结果中存在正像素和负 像素。比例调节的日的是。使所有的负值话合于号示

450 数字图像处理(第三版) 水平 +45 垂直 -45 图10.6线检测模板。角度是相对于图2.186)中的坐标轴系统的 令R,R,R,和R表示图10.6中从左到右的各个模板的响应,其中R值由式(10.2-3)给出。假设 使用这4个模板对一幅图像滤波。在该图像中的某个给定点处,如果 对于所有j≠k有R,>R,则称该点可能与模板k方向的一条线更相 注意。这里使用R来表示模板响 101节中则用来表示区城.。 似。例如,如果在图像中的某个点处,对于j=2.3.4有R,1>.则 请不要混 说该点可能与一条水平线更相似。换句话说,我们可能对检测特定方 向上的线感兴趣。在这种情况下,我们会使用与该方向相关的模板,并对其输出进行阀值处理,就像 在式(10.12)中那样。换句话说,如果我们对检测图像中由给定模板定义的方向上的所有线感兴趣 则只须简单地对该图像运行这个模板,并对结果的绝对值进行阔值处理。留下的点是有最强响应的点, 对于1个像素宽度的线来说,相应的点最接近于模板定义的方向。下例说明了这一过程。 例10,3特定方向线的检测 图10.7(a)显示了前一例子中所用的图像。假设我们的兴趣在于寻找所有的宽度为1个像素、方向为 45°的线。为了这一目的,我们使用图10.6中的第二个模板。图1076)是用该模板对图像滤波后的结果 如之前那样,图10.76)中比背景暗的色调对应于负值。图像中有两个取向为+45方向的主要线段: 个在左上方.另一个在右下方。图10.7(c和()显示了图10.7(b)中对应于这两个区域的放大部分。注意 图10.7(d中的直线段比图10.7()中的该线段亮得多。原因是图10.7(a)中右下方线段的宽度为1个像素 而左上方线段的宽度则不是。该模板被“调谐”到检测+45方向的1个像素宽的线,我们期望,当检测 这样的线时,其响应较强。图10,7()显示了图10.76)的正值。因为我们的兴趣在于最强响应,我们冷T 等于图10.7(@)中的最大值。图10.70使用白色显示了其值满足条件g≥T的点,其中g是图10.7(@)中 的图像。该图中的孤立点是对模板也有类似强响应的点。在原图像中,这些点与它们的邻点都按这样 种方法来取向,即模板在这些位置会产生最大的响应。用图10.4(中的模板可检测这些弧立点,然后副 除这些点;或者可以使用上一章中讨论的形态学算子来副除这些孤立点。 10.2.4边缘模型 边缘检测是基于灰度突变来分割图像的最常用的方法。我们从介绍一些边缘建模的方法开始 然后讨论一些边缘检测方法。 边缘模型根据它们的灰度剖面来分类。台阶边缘是指在1个像素的距离上发生两个灰度级间理 想的过渡。图10.8()显示了-一个垂直台阶边缘的一部分和通过该边缘的一个水平剖面。例如,用于 诸如固体建模和动画领域的出现在由计算机生成的图像中的台阶边缘。这些清晰、理想的边缘可出现 在1个像素的距离上,不需要提供任何使它们看上去“很真实”的附加处理(如平滑)。在算法开发中, 圆客的李季投.06节中花流沙峰祛钱是用一个沙画
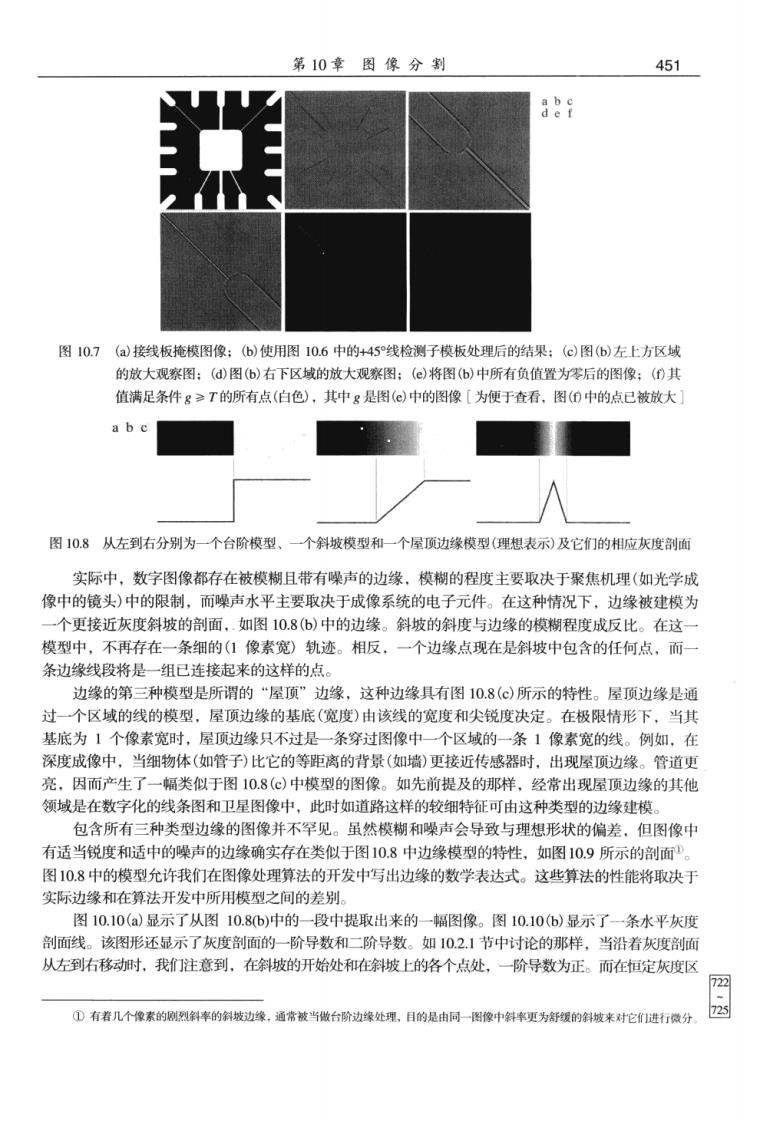
第10章图像分割 451 图10.7()接线板掩模图像:()使用图10.6中的+45线检测子模板处理后的结果:()图(b)左上方区域 的放大观察图:()图(b)右下区域的放大观察图:(@)将图(b)中所有负值置为零后的图像:(0其 值满足条件g≥T的所有点(白色),其中g是图(©)中的图像[为便于查看,图(0中的点已被放大 图10.8从左到右分别为一个台阶模型、一个斜坡模型和一个屋顶边缘模型(理想表示)及它们的相应灰度剖面 实际中,数字图像都存在被模糊且带有噪声的边缘模糊的程度主要取决于聚焦机理(如光学成 像中的镜头)中的限制,而噪声水平主要取决于成像系统的电子元件。在这种情况下,边缘被建模为 一个更接近灰度斜坡的剖面,如图10.8(6)中的边缘。斜坡的斜度与边缘的模糊程度成反比。在这 模型中,不再存在一条细的(1像素宽)轨迹。相反,一个边缘点现在是斜坡中包含的任何点,而 条边缘线段将是一组已连接起来的这样的点。 边缘的第三种模型是所谓的“屋顶”边缘,这种边缘具有图10.8()所示的特性。屋顶边缘是通 过一个区域的线的模型,屋顶边缘的基底(宽度)由该线的宽度和尖锐度决定。在极限情形下,当其 基底为1个像素宽时,屋顶边缘只不过是一条穿过图像中一个区域的一条1像素宽的线。例如,在 深度成像中,当细物体(如管子)比它的等距离的背景(如墙)更接近传感器时,出现屋顶边缘。管道更 亮,因而产生了一幅类似于图10.8()中模型的图像。如先前提及的那样,经常出现屋顶边缘的其他 领域是在数字化的线条图和卫星图像中,此时如道路这样的较细特征可由这种类型的边缘建模 包含所有三种类型边缘的图像并不罕见。虽然模糊和噪声会导致与理想形状的偏差,但图像中 有适当锐度和适中的噪声的边缘确实存在类似于图10.8中边缘模型的特性,如图10.9所示的剖面 图10.8中的模型允许我们在图像处理算法的开发中写出边缘的数学表达式。这些算法的性能将取决于 实际边缘和在算法开发中所用模型之间的差别。 图10.10(a)显示了从图10.8b)中的一段中提取出来的一辐图像。图10.10(6)显示了-一条水平灰度 剂面线。该图形还显示了灰度剖面的一阶导数和二阶导数。如10.2.1节中讨论的那样,当沿着灰度剖面 从左到右移动时,我们注意到,在斜坡的开始处和在斜坡上的络个点处,一阶导数为正。而在恒定灰度区 ①有着几个像素的侧列斜率的斜坡边缘,通常被当做台阶边处理。目的是由同图像中斜率更为舒暖的斜来对它们遗打微分
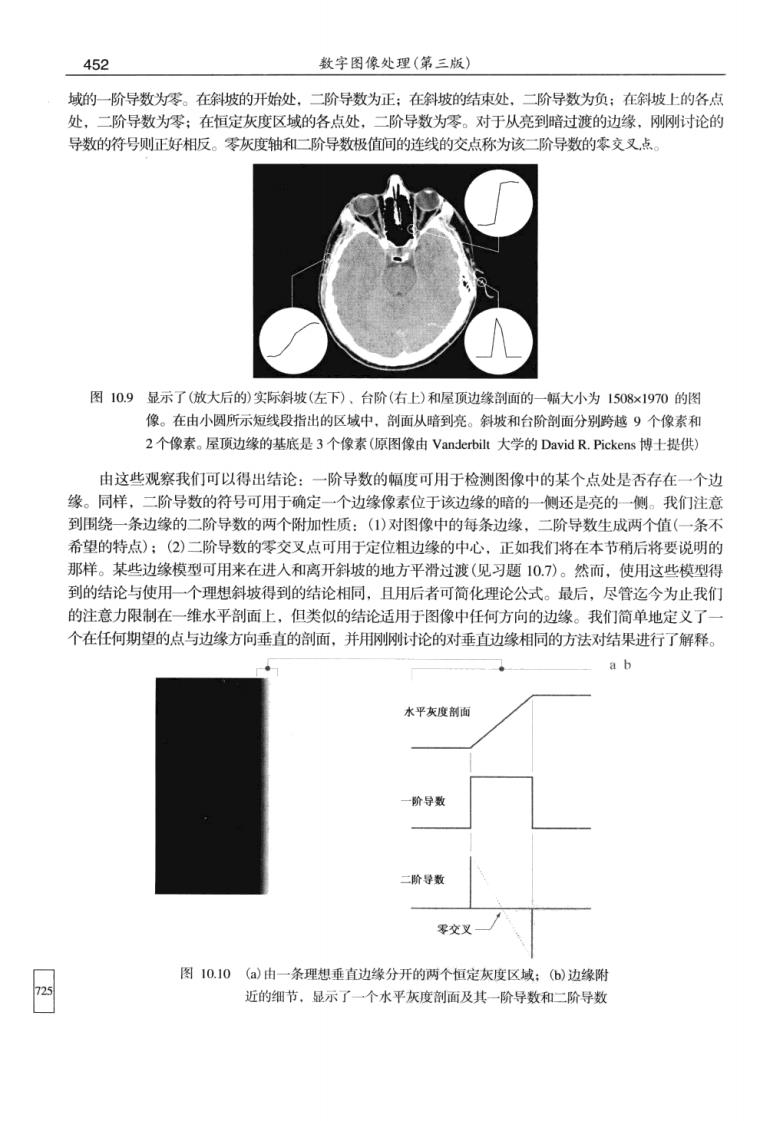
452 数字图像处理(第三版) 城的一阶导数为零。在斜坡的开始处,二阶导数为正:在斜坡的结束处.二阶导数为负:在斜坡上的各点 处,二阶导数为零:在恒定灰度区域的各点处,二阶导数为零。对于从亮到暗过渡的边缘,刚刚讨论的 导数的符号则侧正好相反。零灰度轴和二阶导数极值间的连线的交点称为该二阶导数的零交又,点 图10.9显示了(放大后的)实际斜坡(左下)、台阶(右上)和屋顶边缘剖面的一幅大小为1508x1970的图 像。在由小圆所示短线段指出的区域中,剖面从暗到亮。斜坡和台阶剖面分别跨越9个像素利 2个像素。屋顶边缘的基底是3个像素(原图像由Vanderbilt大学的David R.Pickens博士提供) 由这些观察我们可以得出结论:一阶导数的幅度可用于检测图像中的某个点处是否存在一个边 缘。同样,二阶导数的符号可用于确定一个边缘像素位于该边缘的暗的一侧还是亮的一侧。我们注意 到围绕一条边缘的二阶导数的两个附加性质:()对图像中的每条边缘,二阶导数生成两个值(一条不 希望的特点):(2)二阶导数的零交叉点可用于定位相边缘的中心,正如我们将在本节稍后将要说明的 那样。某些边缘模型可用来在进入和离开斜坡的地方平滑过渡(见习题10.7)。然而,使用这些模型得 到的结论与使用一个理想斜坡得到的结论相同,且用后者可简化理论公式。最后,尽管迄今为止我们 的注意力限制在一维水平剖面上,但类似的结论适用于图像中任何方向的边缘。我们简单地定义了 个在任何期望的点与边缘方向垂直的剖面,并用刚刚讨论的对垂直边缘相同的方法对结果进行了解释。 a b 水平灰度制面 阶导数 阶导贵 零交义一 图10.10()由一条理想垂直边缘分开的两个恒定灰度区域:()边缘 近的细节,显示了一个水平灰度剖面及其一阶导数和二阶导数