
5.1磁电感应式传感器 ◆而传感器的输出电压和电压灵敏度分别为: U=1R= B.LwvR (5-5) R+R S Uo BoLwR (5-6) R+R ◆当传感器的工作温度发生变化或受到外界磁场干扰、 机械振动或冲击时,其灵敏度将发生变化而产生测 量误差。相对误差为 ds,dB dL dR Y= (5-7) B 磁电式传感器茬使用时存在误差,主要为非线性误 ◆ 差和温度误差
◆而传感器的输出电压和电压灵敏度分别为: ◆当传感器的工作温度发生变化或受到外界磁场干扰、 机械振动或冲击时,其灵敏度将发生变化而产生测 量误差。相对误差为 ◆磁电式传感器在使用时存在误差,主要为非线性误 差和温度误差。 0 0 0 (5 5) f f f B LwvR U I R R R 0 0 (5 6) f U f U B LwR S v R R (5 7) I I ds dB dL dR s B L R 5.1 磁电感应式传感器
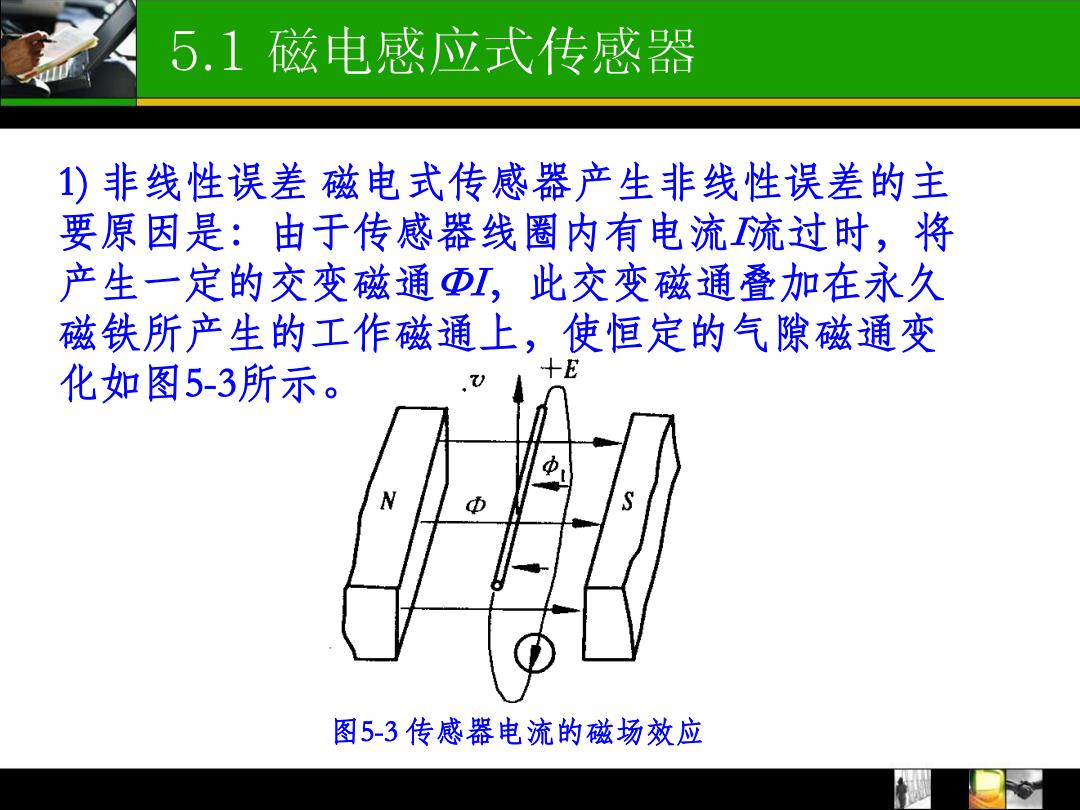
5.1磁电感应式传感器 1)非线性误差磁电式传感器产生非线性误差的主 要原因是:由于传感器线圈内有电流流过时,将 产生一定的交变磁通Φ江,此交变磁通叠加在永久 磁铁所产生的工作磁通上,使恒定的气隙磁通变 化如图5-3所示。 N S 图5-3传感器电流的磁场效应
图5-3 传感器电流的磁场效应 1) 非线性误差 磁电式传感器产生非线性误差的主 要原因是:由于传感器线圈内有电流I流过时,将 产生一定的交变磁通ΦI,此交变磁通叠加在永久 磁铁所产生的工作磁通上,使恒定的气隙磁通变 化如图5-3所示。 5.1 磁电感应式传感器

5.1磁电感应式传感器 2)温度误差当温度变化时,式(5-7)中右边三项 都不为零,对铜线而言每摄氏度变化量为 dL/L≈0.157×10-4,dRR≈0.43×10-2,dB/B每摄氏 度的变化量取决于永久磁铁的磁性材料。对铝镍钴永 久磁合金,dB/B≈-0.02×10-2,这样由式(5-7)可得 近似值: %≈(-4.5%)/10C 这一数值是很可观的,所以需要进行温度补偿。 补偿通常采用热磁分流器。热磁分流器由具有很大负 温度系数的特殊磁性材料做成。它在正常工作温度下 已将空气隙磁通分路掉一小部分
2)温度误差 当温度变化时,式(5-7)中右边三项 都不为零,对铜线而言每摄氏度变化量为 dL/L≈0.157×10-4,dR/R≈0.43×10-2,dB/B每摄氏 度的变化量取决于永久磁铁的磁性材料。对铝镍钴永 久磁合金,dB/B≈-0.02×10-2,这样由式(5-7)可得 近似值: 这一数值是很可观的,所以需要进行温度补偿。 补偿通常采用热磁分流器。热磁分流器由具有很大负 温度系数的特殊磁性材料做成。它在正常工作温度下 已将空气隙磁通分路掉一小部分。 5.1 磁电感应式传感器 t 4.5% 10 C
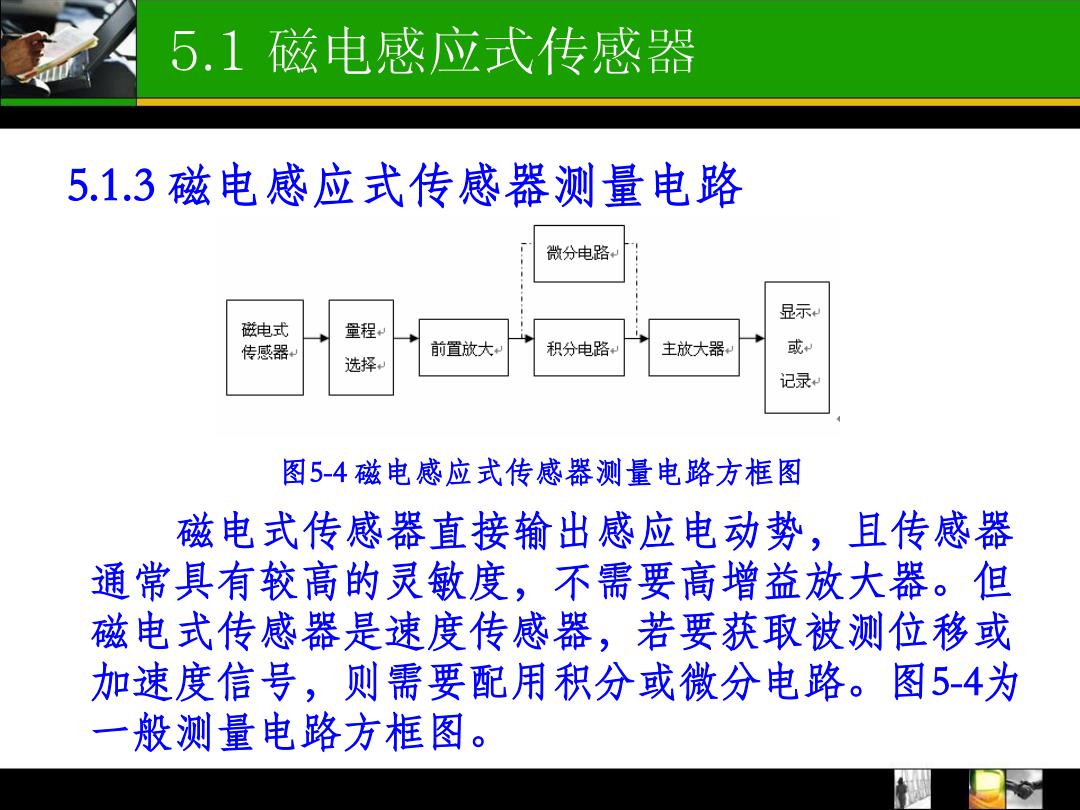
5.1磁电感应式传感器 5.1.3磁电感应式传感器测量电路 微分电路 显示利 磁电式 量程 传感器 前置放大 积分电路 主放大器 或 选择 记录 图54磁电感应式传感器测量电路方框图 磁电式传感器直接输出感应电动势,且传感器 通常具有较高的灵敏度,不需要高增益放大器。但 磁电式传感器是速度传感器,若要获取被测位移或 加速度信号,则需要配用积分或微分电路。图5-4为 一般测量电路方框图
磁电式传感器直接输出感应电动势,且传感器 通常具有较高的灵敏度,不需要高增益放大器。但 磁电式传感器是速度传感器,若要获取被测位移或 加速度信号,则需要配用积分或微分电路。图5-4为 一般测量电路方框图。 图5-4 磁电感应式传感器测量电路方框图 5.1 磁电感应式传感器 5.1.3 磁电感应式传感器测量电路

5.2霍尔效应及霍尔元件 霍尔传感器为载流半导体在磁场中有电磁效 应(霍尔效应)而输出电动势的一种传感器。 ◆ 随着半导体技术的发展,开始用半导体材料制成 霍尔元件,由于它的霍尔效应显著而得到应用和 发展。 霍尔传感器广泛用于电磁测量电流、磁场、压力、 加速度、振动等方面的测量
霍尔传感器为载流半导体在磁场中有电磁效 应(霍尔效应)而输出电动势的一种传感器。 ◆随着半导体技术的发展,开始用半导体材料制成 霍尔元件,由于它的霍尔效应显著而得到应用和 发展。 ◆霍尔传感器广泛用于电磁测量电流、磁场、压力、 加速度、振动等方面的测量。 5.2 霍尔效应及霍尔元件