
动态模型 传感器的动态模型是指输入量随时间变化时传感 器的响应特性。 它描述了输出和输入信号的一种数学关系。由于 传感器的惯性和滞后,当被测量随时间变化时,传感 器的输出往往来不及达到平衡状态,处于动态过渡过 程之中,所以传感器的输出量也是时间的函数。 动态模型通常采用微分方程和传递函数描述
动态模型 传感器的动态模型是指输入量随时间变化时传感 器的响应特性。 它描述了输出和输入信号的一种数学关系。由于 传感器的惯性和滞后,当被测量随时间变化时,传感 器的输出往往来不及达到平衡状态,处于动态过渡过 程之中,所以传感器的输出量也是时间的函数。 动态模型通常采用微分方程和传递函数描述
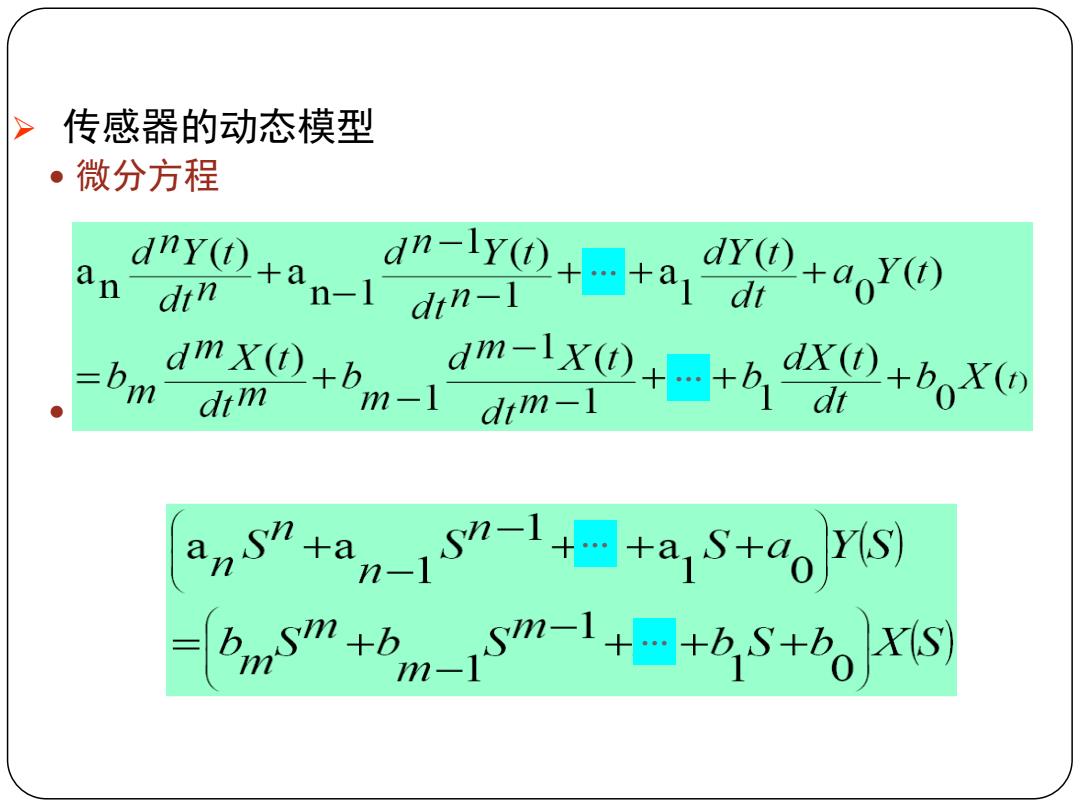
>传感器的动态模型 ·微分方程 dn-Iy(D++adi any(+a-n- an din dr(aY( dmx()+b dim box( m-l dim-1 ansa 5+dov(s) bmm+hm-Sm-1++hs+hoXS
传感器的动态模型 微分方程 传递函数 … … … …
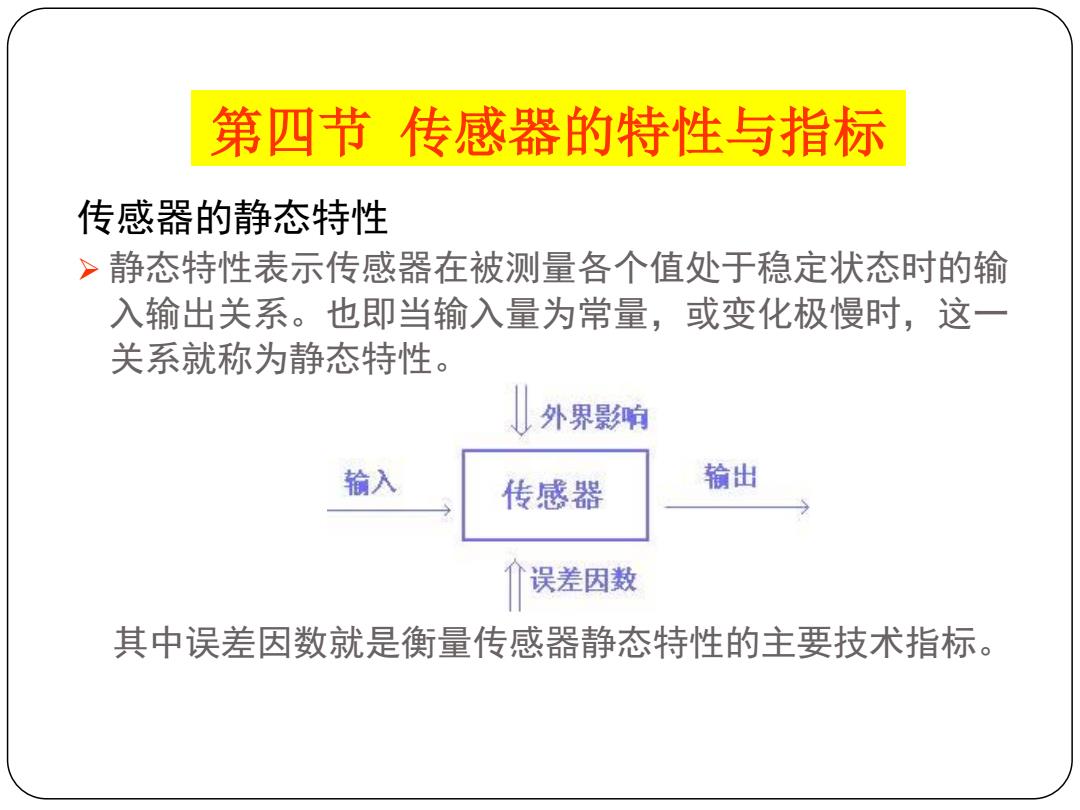
第四节传感器的特性与指标 传感器的静态特性 >静态特性表示传感器在被测量各个值处于稳定状态时的输 入输出关系。也即当输入量为常量,或变化极慢时,这一 关系就称为静态特性 外界影响 输入 传感器 输出 误差因数 其中误差因数就是衡量传感器静态特性的主要技术指标
传感器的静态特性 静态特性表示传感器在被测量各个值处于稳定状态时的输 入输出关系。也即当输入量为常量,或变化极慢时,这一 关系就称为静态特性。 其中误差因数就是衡量传感器静态特性的主要技术指标。 第四节 传感器的特性与指标

静态特性曲线可实际测试获得。 为了标定和数据处理的方便,希望得到线性关 系,可采用硬件和软件的补偿进行线性化处理。 在非线性误差不太大的情况下,采用直线拟合 的方法线性化。 选择拟合直线的主要出发点: 获得最小的非线性误差 计算简便,使用方便
静态特性曲线可实际测试获得。 为了标定和数据处理的方便,希望得到线性关 系,可采用硬件和软件的补偿进行线性化处理。 在非线性误差不太大的情况下,采用直线拟合 的方法线性化。 选择拟合直线的主要出发点: 获得最小的非线性误差。 计算简便,使用方便
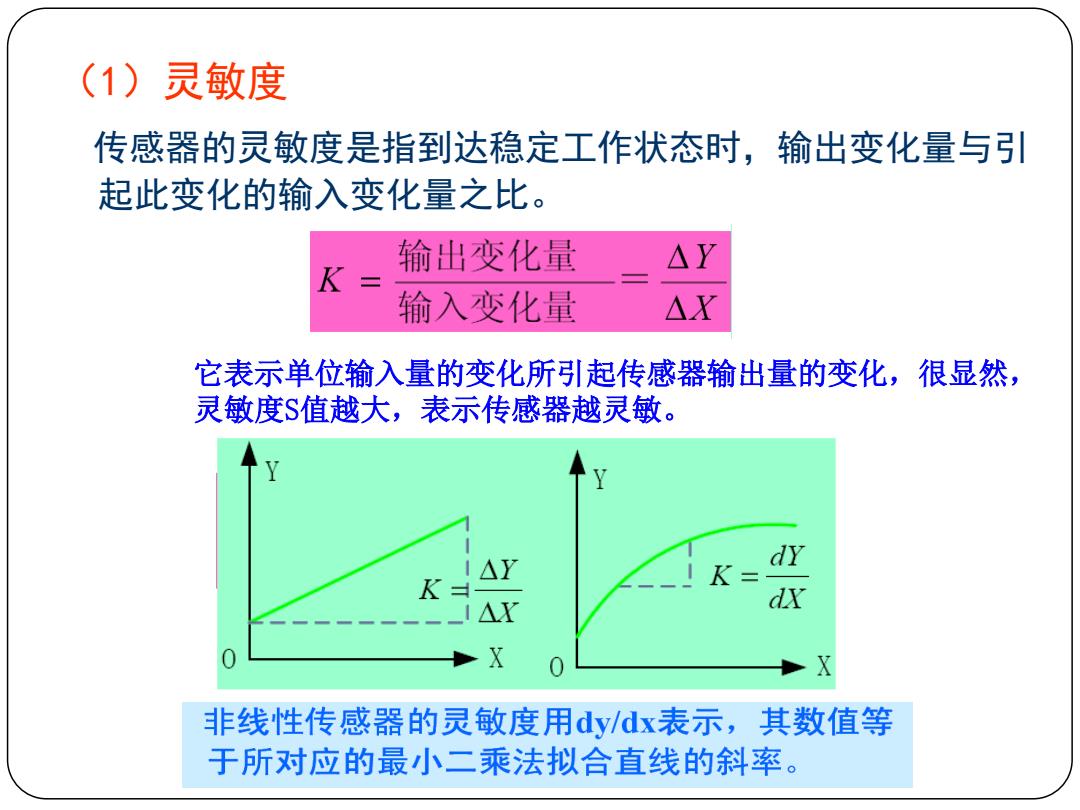
(1)灵敏度 传感器的灵敏度是指到达稳定工作状态时,输出变化量与引 起此变化的输入变化量之比。 输出变化量 K= 输入变化量 △X 它表示单位输入量的变化所引起传感器输出量的变化,很显然, 灵敏度$值越大,表示传感器越灵敏。 △Y dY K- △X dx 非线性传感器的灵敏度用dy/dx表示,其数值等 于所对应的最小二乘法拟合直线的斜率
(1)灵敏度 传感器的灵敏度是指到达稳定工作状态时,输出变化量与引 起此变化的输入变化量之比。 它表示单位输入量的变化所引起传感器输出量的变化,很显然, 灵敏度S值越大,表示传感器越灵敏