Contents o S1.Introduction o S2.Conventional Kalman filter o S3.Example o S4.RLS and Kalman filtering o S5.Square-root information filter o S6.Square-root covariance filter Better numerical properties than the conventional one The square-root RLS algorithms are special cases 6
6 Contents S1. Introduction S2. Conventional Kalman filter S3. Example S4. RLS and Kalman filtering S5. Square-root information filter S6. Square-root covariance filter Better numerical properties than the conventional one The square-root RLS algorithms are special cases
S1.Introduction o MMSE Estimation o Innovation Process o Iterative MMSE Estimation 7
7 S1. Introduction MMSE Estimation Innovation Process Iterative MMSE Estimation
MMSE Estimation o Orthogonal Principle y1=[y(n-)y(n-2)…y(] a(n)=yn)-(nlyn1)) E(a'(n)y)=0 8
8 MMSE Estimation Orthogonal Principle 1 ˆ | n n y n y n y y y n y n y n1 1 2 1 * E( ) 0 n 1 n y
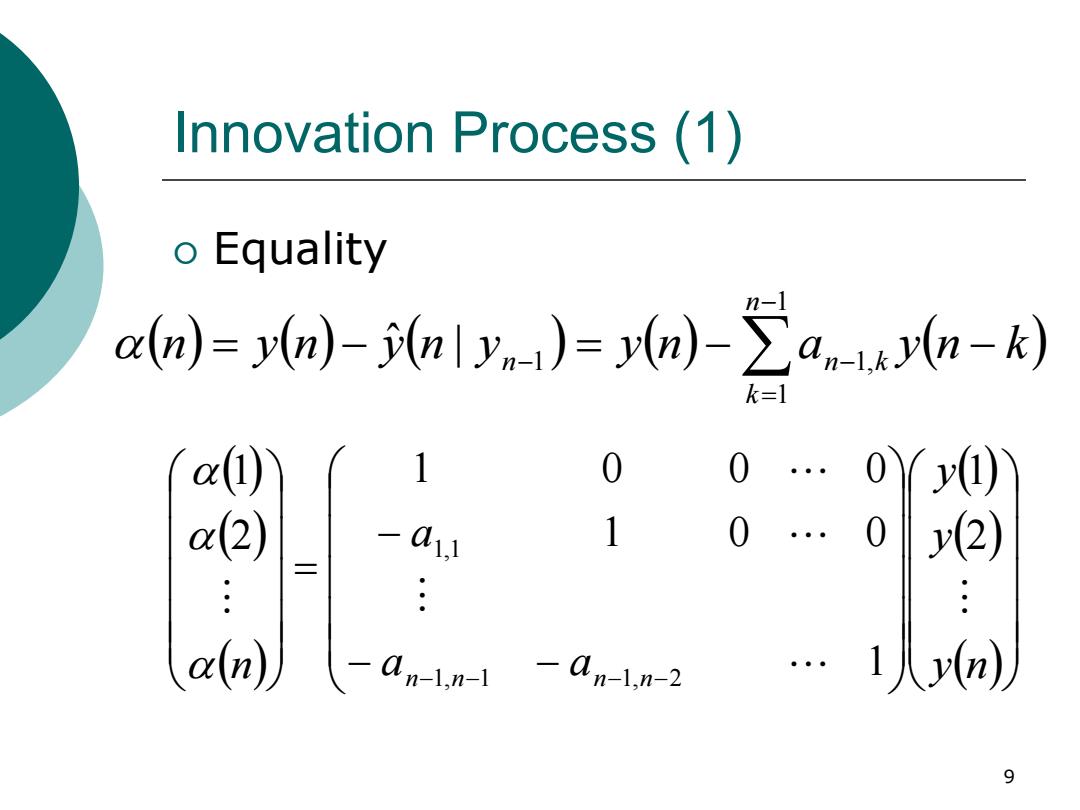
Innovation Process(1) o Equality an=tn-tnly,i)=n)-∑atn-k) 1 0 0… 0 y() 1 0 0 三 -0m-1,n-1 -an-ln-2 9
9 Innovation Process (1) Equality n yn yn y yn a yn k n k n n k 1 1 1 1, ˆ | y n y y a a a n n n n n 2 1 1 1 0 0 1 0 0 0 2 1 1, 1 1, 2 1,1
Innovation Process( (2) o Orthogonality E(a(n)a(k)》=0 k=1,2,…,n-1 10
10 Innovation Process (2) Orthogonality 0 * E n k k 1,2, ,n 1