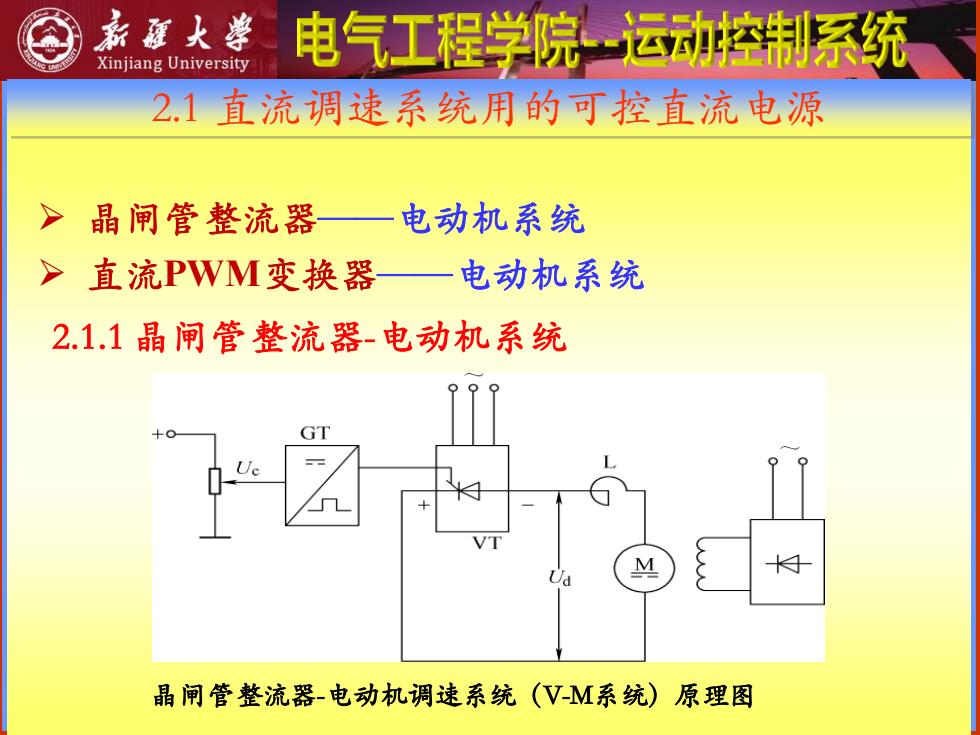
新惠火学 电气工程学院运动控制系统 Xinjiang University 2.1直流调速系统用的可控直流电源 >晶闸管整流器—电动机系统 >直流PWM变换器 一电动机系统 2.1.1晶闸管整流器-电动机系统 GT 晶闸管整流器-电动机调速系统(V-M系统)原理图
➢ 晶闸管整流器——电动机系统 ➢ 直流PWM变换器——电动机系统 2.1 直流调速系统用的可控直流电源 2.1.1 晶闸管整流器-电动机系统 晶闸管整流器-电动机调速系统(V-M系统)原理图
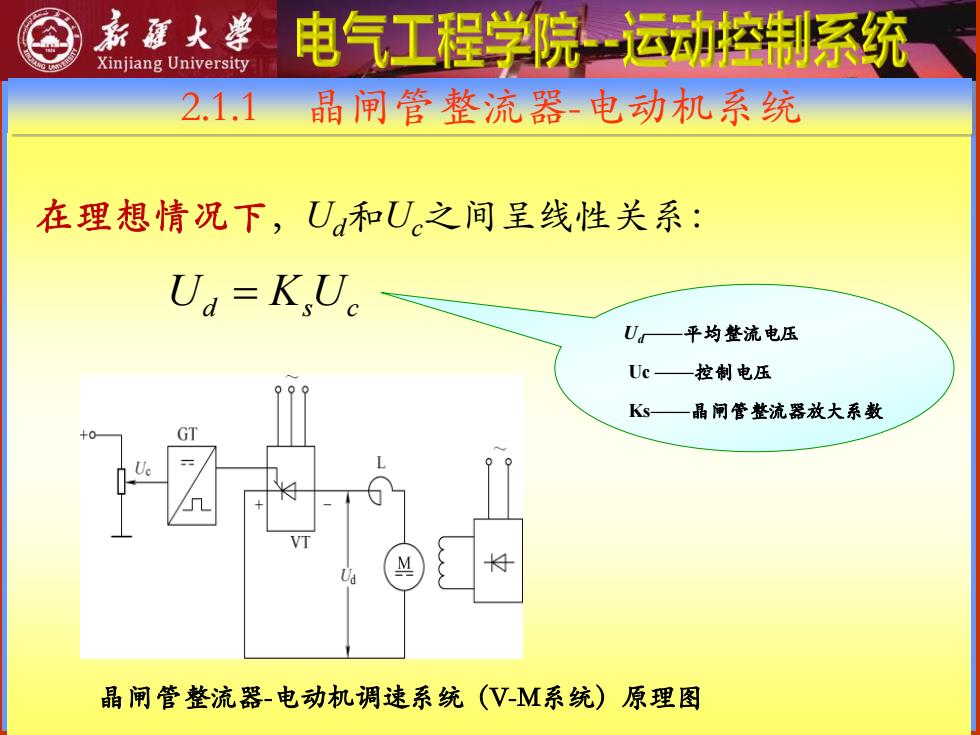
嘉惠火大学 电气工程学院运动控制系统 Xinjiang University 2.1.1 晶闸管整流器电动机系统 在理想情况下,U和U之间呈线性关系: Ua=K Uo U,一平均整流电压 Uc—控制电压 Ks—晶闸管整流器放大系数 GT 晶闸管整流器-电动机调速系统(-M系统)原理图
2.1.1 晶闸管整流器-电动机系统 在理想情况下,Ud和Uc之间呈线性关系: Ud = Ks Uc Ud——平均整流电压 Uc ——控制电压 Ks——晶闸管整流器放大系数 晶闸管整流器-电动机调速系统(V-M系统)原理图
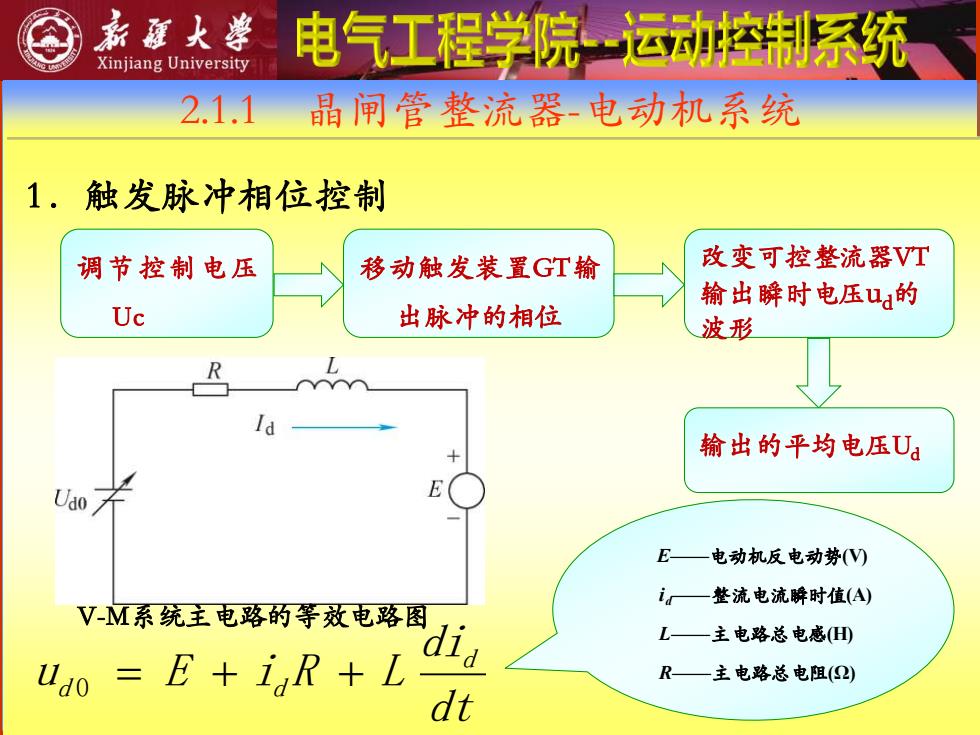
新庭火学 Xinjiang University 电气工程学院运动控制系统 2.1.1 晶闸管整流器-电动机系统 1.触发脉冲相位控制 调节控制电压 移动触发装置GT输 改变可控整流器VT 输出瞬时电压u妇的 Uc 出脉冲的相位 波形 R 输出的平均电压Ua 0a0/ E一电动机反电动势(V) i一整流电流瞬时值(A) V-M系统主电路的等效电路 dia L一主电路总电感(田) Udo E+iR+L R一主电路总电阻(2) dt
2.1.1 晶闸管整流器-电动机系统 调节 控制电 压 Uc 移动触发装置GT输 出脉冲的相位 改变可控整流器VT 输出瞬时电压ud的 波形 dt di u E i R L d d 0 = + d + E——电动机反电动势(V) id——整流电流瞬时值(A) L——主电路总电感(H) R——主电路总电阻(Ω) V-M系统主电路的等效电路图 输出的平均电压Ud 1.触发脉冲相位控制
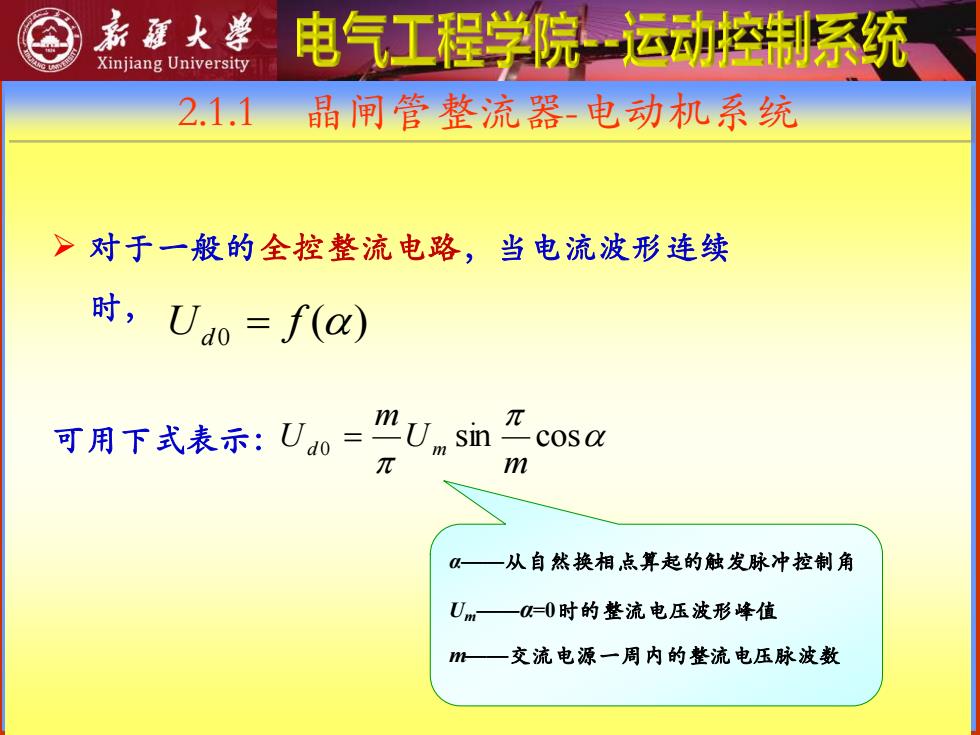
系庭大学 Xinjiang University 电气工程学院-运动控制系统 2.1.1 晶闸管整流器电动机系统 >对于一般的全控整流电路,当电流波形连续 时,Uao=f() 2 用下式表示:U0Usm0s —从自然换相,点算起的触发脉冲控制角 Um—=O时的整流电压波形峰值 一交流电源一周内的整流电压脉波数
2.1.1 晶闸管整流器-电动机系统 ➢ 对于一般的全控整流电路,当电流波形连续 时, 可用下式表示: ( ) Ud 0 = f sin cos 0 m U m Ud = m α——从自然换相点算起的触发脉冲控制角 Um——α=0时的整流电压波形峰值 m——交流电源一周内的整流电压脉波数

新庭火学 电气工程学院运动控制系统 Xinjiang University 2.1.1 晶闸管整流器-电动机系统 整流 电 单相全波 三相半波 三相桥式(全波) 华句金风 L每米减 L向根成《金减 果每金减 L每年流 L每裤气f金填 60 米相金试 玉和半成 L向解成(会减) 2 2 6 √2 2 6 2,34,G0 2.34,o 2.34c m 2 果相金以 丛物平成 盖梅格人(会成 单相全流 三制华城 盖相标人(食 路 果相金城 三相丰或 县和标式(会法们 2 2 6 2码 6侧 √2 20 V6, 6 2340 0.9t/cosa 117Uc0s 2.34U,c05 0,9U,c0s 1.170c0 2.344c05 Uao 0.9U/.cose 1.17U3c0s 2.34Uco5 不同整流电路的整流电压波峰值、脉冲数及平均整流电压
2.1.1 晶闸管整流器-电动机系统 不同整流电路的整流电压波峰值、脉冲数及平均整流电压 整流 电路 单相全波 三相半波 三相桥式(全波) m 2 3 6