机械工程学院机械设计系
机械工程学院机械设计系
机械工程学院机械设计系 绘制机构运动简图的步骤与方法 : (1)对照实物或实物图,分析机构的动作原理、组成情况 和运动情况,确定其组成的各构件性质。 (2)沿着运动传递路线,从原动件开始,逐一分析每两个 构件间相对运动的性质,并确定运动副的类型和数目。 (3)选择合理的运动简图的视图平面。 (4)选择适当的长度比例尺(=实际尺寸(m)/图示长度 (mm)),定出各运动副的相对位置,绘制机构运动简图。 从原动件开始,按运动传递路线,顺序标出各构件的编号和 运动副的代号。在原动件上标明箭头方向即其运动方向
机械工程学院机械设计系 绘制机构运动简图的步骤与方法 : (1)对照实物或实物图,分析机构的动作原理、组成情况 和运动情况,确定其组成的各构件性质。 (2)沿着运动传递路线,从原动件开始,逐一分析每两个 构件间相对运动的性质,并确定运动副的类型和数目。 (3)选择合理的运动简图的视图平面。 (4)选择适当的长度比例尺(=实际尺寸(m)/图示长度 (mm)),定出各运动副的相对位置,绘制机构运动简图。 从原动件开始,按运动传递路线,顺序标出各构件的编号和 运动副的代号。在原动件上标明箭头方向即其运动方向
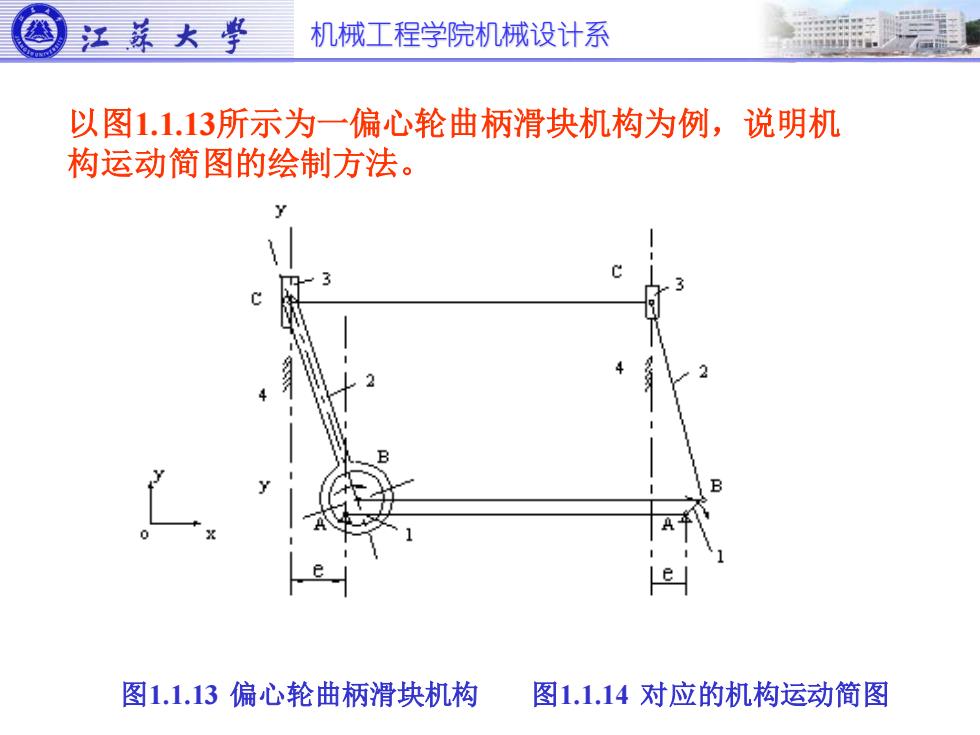
机械工程学院机械设计系 以图1.1.13所示为一偏心轮曲柄滑块机构为例,说明机 构运动简图的绘制方法。 图1.1.13 偏心轮曲柄滑块机构 图1.1.14 对应的机构运动简图
机械工程学院机械设计系 以图1.1.13所示为一偏心轮曲柄滑块机构为例,说明机 构运动简图的绘制方法。 图1.1.13 偏心轮曲柄滑块机构 图1.1.14 对应的机构运动简图
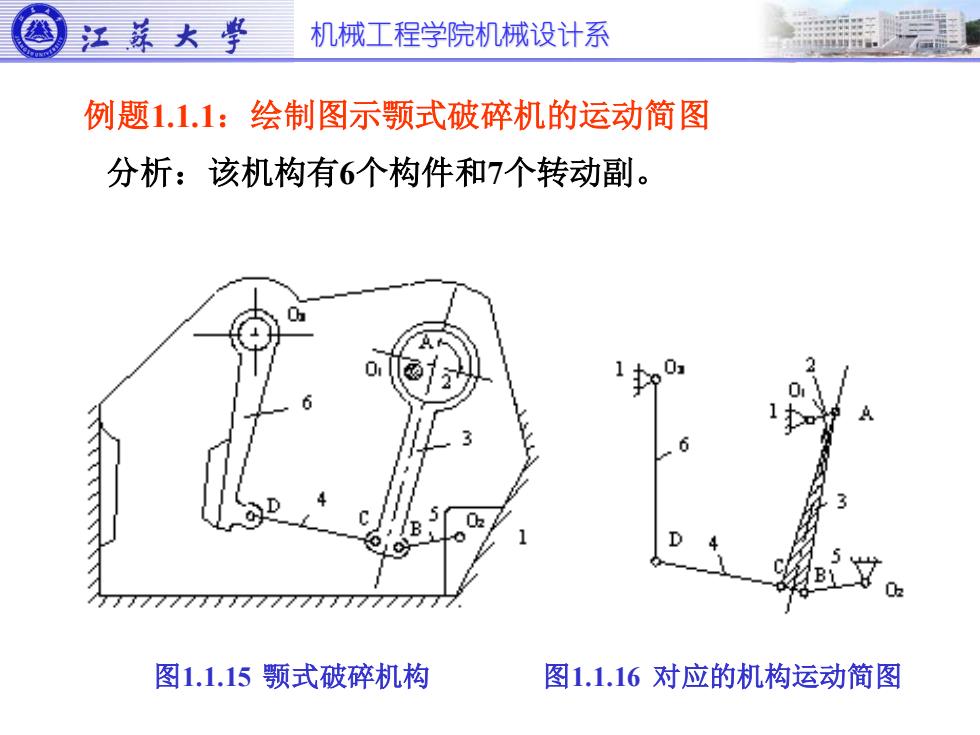
机械工程学院机械设计系 例题1.1.1:绘制图示颚式破碎机的运动简图 分析:该机构有6个构件和7个转动副。 图1.1.15 颚式破碎机构 图1.1.16 对应的机构运动简图
机械工程学院机械设计系 例题1.1.1:绘制图示颚式破碎机的运动简图 分析:该机构有6个构件和7个转动副。 图1.1.15 颚式破碎机构 图1.1.16 对应的机构运动简图
机械工程学院机械设计系 §1.2 平面机构自由度分析及应用举例 一、运动副的自由度和约束 二、平面机构自由度计算公式 三、机构可能运动条件及机构具有确定运 动条件 四、计算机构自由度应注意的问题
机械工程学院机械设计系 §1.2 平面机构自由度分析及应用举例 一、运动副的自由度和约束 二、平面机构自由度计算公式 三、机构可能运动条件及机构具有确定运 动条件 四、计算机构自由度应注意的问题